Practical Systems for Overcoming Processor Imperfections
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The 32-Bit PA-RISC Run-Time Architecture Document, V. 1.0 for HP
The 32-bit PA-RISC Run-time Architecture Document HP-UX 11.0 Version 1.0 (c) Copyright 1997 HEWLETT-PACKARD COMPANY. The information contained in this document is subject to change without notice. HEWLETT-PACKARD MAKES NO WARRANTY OF ANY KIND WITH REGARD TO THIS MATERIAL, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Hewlett-Packard shall not be liable for errors contained herein or for incidental or consequential damages in connection with furnishing, performance, or use of this material. Hewlett-Packard assumes no responsibility for the use or reliability of its software on equipment that is not furnished by Hewlett-Packard. This document contains proprietary information which is protected by copyright. All rights are reserved. No part of this document may be photocopied, reproduced, or translated to another language without the prior written consent of Hewlett-Packard Company. CSO/STG/STD/CLO Hewlett-Packard Company 11000 Wolfe Road Cupertino, California 95014 By The Run-time Architecture Team 32-bit PA-RISC RUN-TIME ARCHITECTURE DOCUMENT 11.0 version 1.0 -1 -2 CHAPTER 1 Introduction 7 1.1 Target Audiences 7 1.2 Overview of the PA-RISC Runtime Architecture Document 8 CHAPTER 2 Common Coding Conventions 9 2.1 Memory Model 9 2.1.1 Text Segment 9 2.1.2 Initialized and Uninitialized Data Segments 9 2.1.3 Shared Memory 10 2.1.4 Subspaces 10 2.2 Register Usage 10 2.2.1 Data Pointer (GR 27) 10 2.2.2 Linkage Table Register (GR 19) 10 2.2.3 Stack Pointer (GR 30) 11 2.2.4 Space -

A Superscalar Out-Of-Order X86 Soft Processor for FPGA
A Superscalar Out-of-Order x86 Soft Processor for FPGA Henry Wong University of Toronto, Intel [email protected] June 5, 2019 Stanford University EE380 1 Hi! ● CPU architect, Intel Hillsboro ● Ph.D., University of Toronto ● Today: x86 OoO processor for FPGA (Ph.D. work) – Motivation – High-level design and results – Microarchitecture details and some circuits 2 FPGA: Field-Programmable Gate Array ● Is a digital circuit (logic gates and wires) ● Is field-programmable (at power-on, not in the fab) ● Pre-fab everything you’ll ever need – 20x area, 20x delay cost – Circuit building blocks are somewhat bigger than logic gates 6-LUT6-LUT 6-LUT6-LUT 3 6-LUT 6-LUT FPGA: Field-Programmable Gate Array ● Is a digital circuit (logic gates and wires) ● Is field-programmable (at power-on, not in the fab) ● Pre-fab everything you’ll ever need – 20x area, 20x delay cost – Circuit building blocks are somewhat bigger than logic gates 6-LUT 6-LUT 6-LUT 6-LUT 4 6-LUT 6-LUT FPGA Soft Processors ● FPGA systems often have software components – Often running on a soft processor ● Need more performance? – Parallel code and hardware accelerators need effort – Less effort if soft processors got faster 5 FPGA Soft Processors ● FPGA systems often have software components – Often running on a soft processor ● Need more performance? – Parallel code and hardware accelerators need effort – Less effort if soft processors got faster 6 FPGA Soft Processors ● FPGA systems often have software components – Often running on a soft processor ● Need more performance? – Parallel -

Implementation, Verification and Validation of an Openrisc-1200
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 10, No. 1, 2019 Implementation, Verification and Validation of an OpenRISC-1200 Soft-core Processor on FPGA Abdul Rafay Khatri Department of Electronic Engineering, QUEST, NawabShah, Pakistan Abstract—An embedded system is a dedicated computer system in which hardware and software are combined to per- form some specific tasks. Recent advancements in the Field Programmable Gate Array (FPGA) technology make it possible to implement the complete embedded system on a single FPGA chip. The fundamental component of an embedded system is a microprocessor. Soft-core processors are written in hardware description languages and functionally equivalent to an ordinary microprocessor. These soft-core processors are synthesized and implemented on the FPGA devices. In this paper, the OpenRISC 1200 processor is used, which is a 32-bit soft-core processor and Fig. 1. General block diagram of embedded systems. written in the Verilog HDL. Xilinx ISE tools perform synthesis, design implementation and configure/program the FPGA. For verification and debugging purpose, a software toolchain from (RISC) processor. This processor consists of all necessary GNU is configured and installed. The software is written in C components which are available in any other microproces- and Assembly languages. The communication between the host computer and FPGA board is carried out through the serial RS- sor. These components are connected through a bus called 232 port. Wishbone bus. In this work, the OR1200 processor is used to implement the system on a chip technology on a Virtex-5 Keywords—FPGA Design; HDLs; Hw-Sw Co-design; Open- FPGA board from Xilinx. -

Softcores for FPGA: the Free and Open Source Alternatives
Softcores for FPGA: The Free and Open Source Alternatives Jeremy Bennett and Simon Cook, Embecosm Abstract Open source soft cores have reached a degree of maturity. You can find them in products as diverse as a Samsung set-top box, NXP's ZigBee chips and NASA's TechEdSat. In this article we'll look at some of the more widely used: the OpenRISC 1000 from OpenCores, Gaisler's LEON family, Lattice Semiconductor's LM32 and Oracle's OpenSPARC, as well as more bleeding edge research designs such as BERI and CHERI from Cambridge University Computer Laboratory. We'll consider the technology, the business case, the engineering risks, and the licensing challenges of using such designs. What do we mean by “free” “Free” is an overloaded term in English. It can mean something you don't pay for, as in “this beer is free”. But it can also mean freedom, as in “you are free to share this article”. It is this latter sense that is central when we talk about free software or hardware designs. Of course such software or hardware designs may also be free, in the sense that you don't have to pay for them, but that is secondary. “Free” software in this sense has been around for a very long time. Explicitly since 1993 and Richard Stallman's GNU Manifesto, but implicitly since the first software was written and shared with colleagues and friends. That freedom is achieved by making the source code available, so others can modify the program, hence the more recent alternative name “open source”, but it is freedom that remains the key concept. -

Openpiton: an Open Source Manycore Research Framework
OpenPiton: An Open Source Manycore Research Framework Jonathan Balkind Michael McKeown Yaosheng Fu Tri Nguyen Yanqi Zhou Alexey Lavrov Mohammad Shahrad Adi Fuchs Samuel Payne ∗ Xiaohua Liang Matthew Matl David Wentzlaff Princeton University fjbalkind,mmckeown,yfu,trin,yanqiz,alavrov,mshahrad,[email protected], [email protected], fxiaohua,mmatl,[email protected] Abstract chipset Industry is building larger, more complex, manycore proces- sors on the back of strong institutional knowledge, but aca- demic projects face difficulties in replicating that scale. To Tile alleviate these difficulties and to develop and share knowl- edge, the community needs open architecture frameworks for simulation, synthesis, and software exploration which Chip support extensibility, scalability, and configurability, along- side an established base of verification tools and supported software. In this paper we present OpenPiton, an open source framework for building scalable architecture research proto- types from 1 core to 500 million cores. OpenPiton is the world’s first open source, general-purpose, multithreaded manycore processor and framework. OpenPiton leverages the industry hardened OpenSPARC T1 core with modifica- Figure 1: OpenPiton Architecture. Multiple manycore chips tions and builds upon it with a scratch-built, scalable uncore are connected together with chipset logic and networks to creating a flexible, modern manycore design. In addition, build large scalable manycore systems. OpenPiton’s cache OpenPiton provides synthesis and backend scripts for ASIC coherence protocol extends off chip. and FPGA to enable other researchers to bring their designs to implementation. OpenPiton provides a complete verifica- tion infrastructure of over 8000 tests, is supported by mature software tools, runs full-stack multiuser Debian Linux, and has been widespread across the industry with manycore pro- is written in industry standard Verilog. -
Processor-103
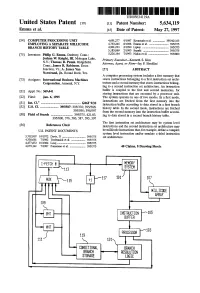
US005634119A United States Patent 19 11 Patent Number: 5,634,119 Emma et al. 45 Date of Patent: May 27, 1997 54) COMPUTER PROCESSING UNIT 4,691.277 9/1987 Kronstadt et al. ................. 395/421.03 EMPLOYING ASEPARATE MDLLCODE 4,763,245 8/1988 Emma et al. ........................... 395/375 BRANCH HISTORY TABLE 4,901.233 2/1990 Liptay ...... ... 395/375 5,185,869 2/1993 Suzuki ................................... 395/375 75) Inventors: Philip G. Emma, Danbury, Conn.; 5,226,164 7/1993 Nadas et al. ............................ 395/800 Joshua W. Knight, III, Mohegan Lake, Primary Examiner-Kenneth S. Kim N.Y.; Thomas R. Puzak. Ridgefield, Attorney, Agent, or Firm-Jay P. Sbrollini Conn.; James R. Robinson, Essex Junction, Vt.; A. James Wan 57 ABSTRACT Norstrand, Jr., Round Rock, Tex. A computer processing system includes a first memory that 73 Assignee: International Business Machines stores instructions belonging to a first instruction set archi Corporation, Armonk, N.Y. tecture and a second memory that stores instructions belong ing to a second instruction set architecture. An instruction (21) Appl. No.: 369,441 buffer is coupled to the first and second memories, for storing instructions that are executed by a processor unit. 22 Fied: Jan. 6, 1995 The system operates in one of two modes. In a first mode, instructions are fetched from the first memory into the 51 Int, C. m. G06F 9/32 instruction buffer according to data stored in a first branch 52 U.S. Cl. ....................... 395/587; 395/376; 395/586; history table. In the second mode, instructions are fetched 395/595; 395/597 from the second memory into the instruction buffer accord 58 Field of Search ........................... -
The 32-Bit PA-RISC Run- Time Architecture Document
The 32-bit PA-RISC Run- time Architecture Document HP-UX 10.20 Version 3.0 (c) Copyright 1985-1997 HEWLETT-PACKARD COMPANY. The information contained in this document is subject to change without notice. HEWLETT-PACKARD MAKES NO WARRANTY OF ANY KIND WITH REGARD TO THIS MATERIAL, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OFMERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Hewlett-Packard shall not be liable for errors contained herein or for incidental or consequential damages in connection with furnishing, performance, or use of this material. Hewlett-Packard assumes no responsibility for the use or reliability of its software on equipment that is not furnished by Hewlett-Packard. This document contains proprietary information which is protected by copyright. All rights are reserved. No part of this document may be photocopied, reproduced, or translated to another language without the prior written consent of Hewlett- Packard Company. CSO/STG/STD/CLO Hewlett-Packard Company 11000 Wolfe Road Cupertino, California 95014 By The Run-time Architecture Team CHAPTER 1 Introduction This document describes the runtime architecture for PA-RISC systems running either the HP-UX or the MPE/iX operating system. Other operating systems running on PA-RISC may also use this runtime architecture or a variant of it. The runtime architecture defines all the conventions and formats necessary to compile, link, and execute a program on one of these operating systems. Its purpose is to ensure that object modules produced by many different compilers can be linked together into a single application, and to specify the interfaces between compilers and linker, and between linker and operating system. -

Small Soft Core up Inventory ©2019 James Brakefield Opencore and Other Soft Core Processors Reverse-U16 A.T
tool pip _uP_all_soft opencores or style / data inst repor com LUTs blk F tool MIPS clks/ KIPS ven src #src fltg max max byte adr # start last secondary web status author FPGA top file chai e note worthy comments doc SOC date LUT? # inst # folder prmary link clone size size ter ents ALUT mults ram max ver /inst inst /LUT dor code files pt Hav'd dat inst adrs mod reg year revis link n len Small soft core uP Inventory ©2019 James Brakefield Opencore and other soft core processors reverse-u16 https://github.com/programmerby/ReVerSE-U16stable A.T. Z80 8 8 cylcone-4 James Brakefield11224 4 60 ## 14.7 0.33 4.0 X Y vhdl 29 zxpoly Y yes N N 64K 64K Y 2015 SOC project using T80, HDMI generatorretro Z80 based on T80 by Daniel Wallner copyblaze https://opencores.org/project,copyblazestable Abdallah ElIbrahimi picoBlaze 8 18 kintex-7-3 James Brakefieldmissing block622 ROM6 217 ## 14.7 0.33 2.0 57.5 IX vhdl 16 cp_copyblazeY asm N 256 2K Y 2011 2016 wishbone extras sap https://opencores.org/project,sapstable Ahmed Shahein accum 8 8 kintex-7-3 James Brakefieldno LUT RAM48 or block6 RAM 200 ## 14.7 0.10 4.0 104.2 X vhdl 15 mp_struct N 16 16 Y 5 2012 2017 https://shirishkoirala.blogspot.com/2017/01/sap-1simple-as-possible-1-computer.htmlSimple as Possible Computer from Malvinohttps://www.youtube.com/watch?v=prpyEFxZCMw & Brown "Digital computer electronics" blue https://opencores.org/project,bluestable Al Williams accum 16 16 spartan-3-5 James Brakefieldremoved clock1025 constraint4 63 ## 14.7 0.67 1.0 41.1 X verilog 16 topbox web N 4K 4K N 16 2 2009 -

Design of the RISC-V Instruction Set Architecture
Design of the RISC-V Instruction Set Architecture Andrew Waterman Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-1 http://www.eecs.berkeley.edu/Pubs/TechRpts/2016/EECS-2016-1.html January 3, 2016 Copyright © 2016, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor David Patterson, Chair Professor Krste Asanovi´c Associate Professor Per-Olof Persson Spring 2016 Design of the RISC-V Instruction Set Architecture Copyright 2016 by Andrew Shell Waterman 1 Abstract Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman Doctor of Philosophy in Computer Science University of California, Berkeley Professor David Patterson, Chair The hardware-software interface, embodied in the instruction set architecture (ISA), is arguably the most important interface in a computer system. Yet, in contrast to nearly all other interfaces in a modern computer system, all commercially popular ISAs are proprietary. -

A Lisp Oriented Architecture by John W.F
A Lisp Oriented Architecture by John W.F. McClain Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degrees of Master of Science in Electrical Engineering and Computer Science and Bachelor of Science in Electrical Engineering at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY September 1994 © John W.F. McClain, 1994 The author hereby grants to MIT permission to reproduce and to distribute copies of this thesis document in whole or in part. Signature of Author ...... ;......................... .............. Department of Electrical Engineering and Computer Science August 5th, 1994 Certified by....... ......... ... ...... Th nas F. Knight Jr. Principal Research Scientist 1,,IA £ . Thesis Supervisor Accepted by ....................... 3Frederic R. Morgenthaler Chairman, Depattee, on Graduate Students J 'FROM e ;; "N MfLIT oARIES ..- A Lisp Oriented Architecture by John W.F. McClain Submitted to the Department of Electrical Engineering and Computer Science on August 5th, 1994, in partial fulfillment of the requirements for the degrees of Master of Science in Electrical Engineering and Computer Science and Bachelor of Science in Electrical Engineering Abstract In this thesis I describe LOOP, a new architecture for the efficient execution of pro- grams written in Lisp like languages. LOOP allows Lisp programs to run at high speed without sacrificing safety or ease of programming. LOOP is a 64 bit, long in- struction word architecture with support for generic arithmetic, 64 bit tagged IEEE floats, low cost fine grained read and write barriers, and fast traps. I make estimates for how much these Lisp specific features cost and how much they may speed up the execution of programs written in Lisp. -

Evaluation of Synthesizable CPU Cores
Evaluation of synthesizable CPU cores DANIEL MATTSSON MARCUS CHRISTENSSON Maste r ' s Thesis Com p u t e r Science an d Eng i n ee r i n g Pro g r a m CHALMERS UNIVERSITY OF TECHNOLOGY Depart men t of Computer Engineering Gothe n bu r g 20 0 4 All rights reserved. This publication is protected by law in accordance with “Lagen om Upphovsrätt, 1960:729”. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior permission of the authors. Daniel Mattsson and Marcus Christensson, Gothenburg 2004. Evaluation of synthesizable CPU cores Abstract The three synthesizable processors: LEON2 from Gaisler Research, MicroBlaze from Xilinx, and OpenRISC 1200 from OpenCores are evaluated and discussed. Performance in terms of benchmark results and area resource usage is measured. Different aspects like usability and configurability are also reviewed. Three configurations for each of the processors are defined and evaluated: the comparable configuration, the performance optimized configuration and the area optimized configuration. For each of the configurations three benchmarks are executed: the Dhrystone 2.1 benchmark, the Stanford benchmark suite and a typical control application run as a benchmark. A detailed analysis of the three processors and their development tools is presented. The three benchmarks are described and motivated. Conclusions and results in terms of benchmark results, performance per clock cycle and performance per area unit are discussed and presented. Sammanfattning De tre syntetiserbara processorerna: LEON2 från Gaisler Research, MicroBlaze från Xilinx och OpenRISC 1200 från OpenCores utvärderas och diskuteras. -

Small Soft Core up Inventory ©2014 James Brakefield Opencore and Other Soft Core Processors Only Cores in the "Usable" Category Included
Small soft core uP Inventory ©2014 James Brakefield Opencore and other soft core processors Only cores in the "usable" category included Most Prolific Authors ©2014 James Brakefield John Kent micro8a, micro16b, system05, system09, system11, system68 6 Daniel Wallner ax8, ppx16, t65, t80 4 Ulrich Riedel 68hc05, 68hc08, tiny64, tiny8 4 Jose Ruiz ion, light52, light8080 3 Lazaridis Dimitris mips_fault_tolerant, mipsr2000, mips_enhanced 3 Shawn Tan ae18, aeMB, k68 3 Most FPGA results (e.g. easy to compile, place & route on any FPGA family) ©2014 James Brakefield eco32 cyclone-4, arria-2, spartan-3, spartan-6, kintex-7 5 navre cyclone-4, arria-2, cyclone-5, spartan-6, kintex-7 5 leros cyclone-4, spartan-3, spartan-6, kintex-7 4 openmsp430 cyclone-4, stratix-3, spartan-6, virtex-6 4 Most Clones ©2014 James Brakefield ion, minimips, mips_fault_tolerant, misp32r1, misp789, mipsr2000, plasma, ucore, yacc, MIPS 10 m1_core 6502 ag_6502, cpu6502_true_cycle, free6502, lattice6502, m65c02, t65, t6507lp, m65 8 PIC16 free_risc8, lwrisc, minirisc, p16c5x, ppx16, recore54, risc16f84, risc5x 8 microblaze aeMB, mblite, microblaze, myblaze, openfire_core, secretblaze 6 6800 hd63701, system68, system05, 68hc05, 68hc08 5 8051 dalton_8051, light52, mc8051, t51, turbo8051 5 avr avr_core, avr_hp, avr8, navre, riscmcu 5 z80 nextz80, t80, tv80, wb_z80, y80e 5 openrisc altor32, minsoc, or1k, or1200_hp 4 6809 6809_6309, system09, mc6809e 3 8080 cpu8080, light8080, t80 3 68000 ao68000, tg68, v1_coldfire 3 PDP-8 pdp8, pdp8l, pdp8verilog 3 picoblaze copyblaze, pacoblaze,