Physical Proof of Only Five Regular Solids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![Arxiv:Math/9906062V1 [Math.MG] 10 Jun 1999 Udo Udmna Eerh(Rn 96-01-00166)](https://docslib.b-cdn.net/cover/3717/arxiv-math-9906062v1-math-mg-10-jun-1999-udo-udmna-eerh-rn-96-01-00166-483717.webp)
Arxiv:Math/9906062V1 [Math.MG] 10 Jun 1999 Udo Udmna Eerh(Rn 96-01-00166)
Embedding the graphs of regular tilings and star-honeycombs into the graphs of hypercubes and cubic lattices ∗ Michel DEZA CNRS and Ecole Normale Sup´erieure, Paris, France Mikhail SHTOGRIN Steklov Mathematical Institute, 117966 Moscow GSP-1, Russia Abstract We review the regular tilings of d-sphere, Euclidean d-space, hyperbolic d-space and Coxeter’s regular hyperbolic honeycombs (with infinite or star-shaped cells or vertex figures) with respect of possible embedding, isometric up to a scale, of their skeletons into a m-cube or m-dimensional cubic lattice. In section 2 the last remaining 2-dimensional case is decided: for any odd m ≥ 7, star-honeycombs m m {m, 2 } are embeddable while { 2 ,m} are not (unique case of non-embedding for dimension 2). As a spherical analogue of those honeycombs, we enumerate, in section 3, 36 Riemann surfaces representing all nine regular polyhedra on the sphere. In section 4, non-embeddability of all remaining star-honeycombs (on 3-sphere and hyperbolic 4-space) is proved. In the last section 5, all cases of embedding for dimension d> 2 are identified. Besides hyper-simplices and hyper-octahedra, they are exactly those with bipartite skeleton: hyper-cubes, cubic lattices and 8, 2, 1 tilings of hyperbolic 3-, 4-, 5-space (only two, {4, 3, 5} and {4, 3, 3, 5}, of those 11 have compact both, facets and vertex figures). 1 Introduction arXiv:math/9906062v1 [math.MG] 10 Jun 1999 We say that given tiling (or honeycomb) T has a l1-graph and embeds up to scale λ into m-cube Hm (or, if the graph is infinite, into cubic lattice Zm ), if there exists a mapping f of the vertex-set of the skeleton graph of T into the vertex-set of Hm (or Zm) such that λdT (vi, vj)= ||f(vi), f(vj)||l1 = X |fk(vi) − fk(vj)| for all vertices vi, vj, 1≤k≤m ∗This work was supported by the Volkswagen-Stiftung (RiP-program at Oberwolfach) and Russian fund of fundamental research (grant 96-01-00166). -

A Tourist Guide to the RCSR
A tourist guide to the RCSR Some of the sights, curiosities, and little-visited by-ways Michael O'Keeffe, Arizona State University RCSR is a Reticular Chemistry Structure Resource available at http://rcsr.net. It is open every day of the year, 24 hours a day, and admission is free. It consists of data for polyhedra and 2-periodic and 3-periodic structures (nets). Visitors unfamiliar with the resource are urged to read the "about" link first. This guide assumes you have. The guide is designed to draw attention to some of the attractions therein. If they sound particularly attractive please visit them. It can be a nice way to spend a rainy Sunday afternoon. OKH refers to M. O'Keeffe & B. G. Hyde. Crystal Structures I: Patterns and Symmetry. Mineral. Soc. Am. 1966. This is out of print but due as a Dover reprint 2019. POLYHEDRA Read the "about" for hints on how to use the polyhedron data to make accurate drawings of polyhedra using crystal drawing programs such as CrystalMaker (see "links" for that program). Note that they are Cartesian coordinates for (roughly) equal edge. To make the drawing with unit edge set the unit cell edges to all 10 and divide the coordinates given by 10. There seems to be no generally-agreed best embedding for complex polyhedra. It is generally not possible to have equal edge, vertices on a sphere and planar faces. Keywords used in the search include: Simple. Each vertex is trivalent (three edges meet at each vertex) Simplicial. Each face is a triangle. -

Regular Polyhedra Through Time
Fields Institute I. Hubard Polytopes, Maps and their Symmetries September 2011 Regular polyhedra through time The greeks were the first to study the symmetries of polyhedra. Euclid, in his Elements showed that there are only five regular solids (that can be seen in Figure 1). In this context, a polyhe- dron is regular if all its polygons are regular and equal, and you can find the same number of them at each vertex. Figure 1: Platonic Solids. It is until 1619 that Kepler finds other two regular polyhedra: the great dodecahedron and the great icosahedron (on Figure 2. To do so, he allows \false" vertices and intersection of the (convex) faces of the polyhedra at points that are not vertices of the polyhedron, just as the I. Hubard Polytopes, Maps and their Symmetries Page 1 Figure 2: Kepler polyhedra. 1619. pentagram allows intersection of edges at points that are not vertices of the polygon. In this way, the vertex-figure of these two polyhedra are pentagrams (see Figure 3). Figure 3: A regular convex pentagon and a pentagram, also regular! In 1809 Poinsot re-discover Kepler's polyhedra, and discovers its duals: the small stellated dodecahedron and the great stellated dodecahedron (that are shown in Figure 4). The faces of such duals are pentagrams, and are organized on a \convex" way around each vertex. Figure 4: The other two Kepler-Poinsot polyhedra. 1809. A couple of years later Cauchy showed that these are the only four regular \star" polyhedra. We note that the convex hull of the great dodecahedron, great icosahedron and small stellated dodecahedron is the icosahedron, while the convex hull of the great stellated dodecahedron is the dodecahedron. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -

Wythoffian Skeletal Polyhedra
Wythoffian Skeletal Polyhedra by Abigail Williams B.S. in Mathematics, Bates College M.S. in Mathematics, Northeastern University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Dedication I would like to dedicate this dissertation to my Meme. She has always been my loudest cheerleader and has supported me in all that I have done. Thank you, Meme. ii Abstract of Dissertation Wythoff's construction can be used to generate new polyhedra from the symmetry groups of the regular polyhedra. In this dissertation we examine all polyhedra that can be generated through this construction from the 48 regular polyhedra. We also examine when the construction produces uniform polyhedra and then discuss other methods for finding uniform polyhedra. iii Acknowledgements I would like to start by thanking Professor Schulte for all of the guidance he has provided me over the last few years. He has given me interesting articles to read, provided invaluable commentary on this thesis, had many helpful and insightful discussions with me about my work, and invited me to wonderful conferences. I truly cannot thank him enough for all of his help. I am also very thankful to my committee members for their time and attention. Additionally, I want to thank my family and friends who, for years, have supported me and pretended to care everytime I start talking about math. Finally, I want to thank my husband, Keith. -

Download Paper
Hyperseeing the Regular Hendecachoron Carlo H. Séquin Jaron Lanier EECS, UC Berkeley CET, UC Berkeley E-mail: [email protected] E-mail: [email protected] Abstract The hendecachoron is an abstract 4-dimensional polytope composed of eleven cells in the form of hemi-icosahedra. This paper tries to foster an understanding of this intriguing object of high symmetry by discussing its construction in bottom-up and top down ways and providing visualization by computer graphics models. 1. Introduction The hendecachoron (11-cell) is a regular self-dual 4-dimensional polytope [3] composed from eleven non-orientable, self-intersecting hemi-icosahedra. This intriguing object of high combinatorial symmetry was discovered in 1976 by Branko Grünbaum [3] and later rediscovered and analyzed from a group theoretic point of view by H.S.M. Coxeter [2]. Freeman Dyson, the renowned physicist, was also much intrigued by this shape and remarked in an essay: “Plato would have been delighted to know about it.” Figure 1: Symmetrical arrangement of five hemi-icosahedra, forming a partial Hendecachoron. For most people it is hopeless to try to understand this highly self-intersecting, single-sided polytope as an integral object. In the 1990s Nat Friedman introduced the term hyper-seeing for gaining a deeper understanding of an object by viewing it from many different angles. Thus to explain the convoluted geometry of the 11-cell, we start by looking at a step-wise, bottom-up construction (Fig.1) of this 4- dimensional polytope from its eleven boundary cells in the form of hemi-icosahedra. But even the structure of these single-sided, non-orientable boundary cells takes some effort to understand; so we start by looking at one of the simplest abstract polytopes of this type: the hemicube. -

A Recursive Algorithm for the K-Face Numbers of Wythoffian-N-Polytopes Constructed from Regular Polytopes
Journal of Information Processing Vol.25 528–536 (Aug. 2017) [DOI: 10.2197/ipsjjip.25.528] Invited Paper A recursive Algorithm for the k-face Numbers of Wythoffian-n-polytopes Constructed from Regular Polytopes Jin Akiyama1,a) Sin Hitotumatu2 Motonaga Ishii3,b) Akihiro Matsuura4,c) Ikuro Sato5,d) Shun Toyoshima6,e) Received: September 6, 2016, Accepted: May 25, 2017 Abstract: In this paper, an n-dimensional polytope is called Wythoffian if it is derived by the Wythoff construction from an n-dimensional regular polytope whose finite reflection group belongs to An,Bn,Cn,F4,G2,H3,H4 or I2(p). Based on combinatorial and topological arguments, we give a matrix-form recursive algorithm that calculates the num- ber of k-faces (k = 0, 1,...,n) of all the Wythoffian-n-polytopes using Schlafli-Wytho¨ ff symbols. The correctness of the algorithm is reconfirmed by the method of exhaustion using a computer. Keywords: Wythoff construction, Wythoffian polytopes, k-face numbers, recursive algorithm, Coxeter group ( c ) volumes and surface areas. 1. Introduction Our purpose has been completed and already implemented High-dimensional polytopes have been studied mainly by the as computer programs. We will introduce a new methodology following methodologies: to study volumes, surface areas, number of k-faces sharing a (1) Combinatorics and Topology, (2) Graph Theory, (3) Group vertex, etc. of Wythoffian-n-polytopes constructed from regular Theory and (4) Metric Geometry. See [1], [2], [8], [9], [10], [11], polytopes in the forthcoming papers. In this paper, as a first [14], [15], [18], [19] for some background researches on tilings, step, we develop a recursive algorithm that computes the f-vector lattices and polytopes. -

Extensions of Regular Polytopes with Preassigned Schläfli Symbol
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Journal of Combinatorial Theory, Series A 116 (2009) 303–313 Contents lists available at ScienceDirect Journal of Combinatorial Theory, Series A www.elsevier.com/locate/jcta Extensions of regular polytopes with preassigned Schläfli symbol ✩ Daniel Pellicer 1 Universidad Nacional Autónoma de México, Mexico, DF 04510, Mexico article info abstract Article history: We say that a (d + 1)-polytope P is an extension of a polytope Received 27 November 2006 K if the facets or the vertex figures of P are isomorphic to K. Availableonline8August2008 The Schläfli symbol of any regular extension of a regular polytope isdeterminedexceptforitsfirstorlastentry.Foranyregular Keywords: polytope K we construct regular extensions with any even number Extensions Abstract regular polytopes as first entry of the Schläfli symbol. These extensions are lattices if K is a lattice. Moreover, using the so-called CPR graphs we provide a more general way of constructing extensions of polytopes. © 2008 Elsevier Inc. All rights reserved. 1. Introduction This paper addresses the problem of the existence of an abstract regular (d + 1)-polytope Q whose facets are isomorphic to K, where K is a given regular d-polytope. In 1983 Schulte constructed a regular extension of any given d-polytope K to a (d + 1)-polytope with ∞ as the last entry of its Schläfli symbol (see [12] and [5, Chapter 4D]). This extension is universal in the sense that it covers any other regular extension of K. Another extension was found by Schulte in [9], for polytopes with the property that their automorphism group acts faithfully on their facets (see also [10,12,13]); in this case the last entry of the Schläfli symbol is 6. -
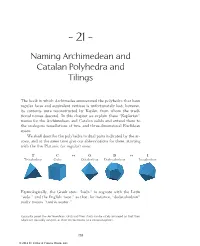
Naming Archimedean and Catalan Polyhedra and Tilings
-21- Naming Archimedean and Catalan Polyhedra and Tilings The book in which Archimedes enumerated the polyhedra that have regular faces and equivalent vertices is unfortunately lost; however, its contents were reconstructed by Kepler, from whom the tradi- tional names descend. In this chapter we explain these “Keplerian” names for the Archimedean and Catalan solids and extend them to the analogous tessellations of two- and three-dimensional Euclidean space. We shall describe the polyhedra in dual pairs indicated by the ar- rows, and at the same time give our abbreviations for them, starting with the five Platonic (or regular) ones: TC↔ OD↔ I Tetrahedron Cube Octahedron Dodecahedron Icosahedron Etymologically, the Greek stem “hedr-” is cognate with the Latin “sede-” and the English “seat,” so that, for instance, “dodecahedron” really means “twelve-seater.” (opposite page) The Archimedean solids and their duals can be nicely arranged so that their edges are mutually tangent, at their intersections, to a common sphere. 283 © 2016 by Taylor & Francis Group, LLC 284 21. Naming Archimedean and Catalan Polyhedra and Tilings Truncation and “Kis”ing These are followed by their “truncated” and “kis-” versions. Here, truncation means cutting off the corners in such a way that each regular n-gonal face is replaced by a regular 2n-gonal one. The dual operation is to erect a pyramid on each face, thus replacing a regular m-gon by m isoceles triangles. These give five Archimedean and five Catalan solids: truncated truncated truncated truncated truncated Tetrahedron Cube Octahedron Dodecahedron Icosahedron tT tC tO tD tI kT kC kO kD kI kisTetrahedron kisCube kisOctahedron kisDodecahedron kisIcosahedron The names used by Kepler for the Catalan ones were rather longer, namely, triakis tetrakis triakis pentakis triakis Downloaded by [University of Bergen Library] at 04:55 26 October 2016 tetrahedron hexahedron octahedron dodecahedron icosahedron and were usually printed as single words. -

AN INFINITE GRAPH of GIRTH 12 by ASIA Ivlfc WEISS
TRANSACTIONS of the AMERICAN MATHEMATICAL SOCIETY Volume 283. Number 2, June 1984 AN INFINITE GRAPH OF GIRTH 12 BY ASIA IVlfc WEISS Abstract. From the regular hyperbolic honeycomb {3,6,3} we derive regular honeycombs with finite numbers of toroidal cells. Joining centers of faces of these honeycombs to the midpoints of its edges we obtain trivalent symmetrical graphs. We investigate the relation between these honeycombs, their groups and the graphs embedded in them. 1. Introduction. Coxeter and Whitrow [1950, p. 429] showed that the points whose four coordinates are proportional to the integral solutions of the Diophantine equation t2 — x2 —y2 — z2 — 1 are vertices of the hyperbolic honeycomb {4,4, 3}. Coxeter suggested that it would be useful to find coordinates for all regular hyperbolic honeycombs as integral solutions of Diophantine equations since as a by-product we would obtain a simple representation for generators of the symmetry groups of these honeycombs. Garner in his Ph.D. Thesis [1964] discovered coordi- nates for two more hyperbolic honeycombs {6,3,4} and {6,3,3}. In §3 we complete these investigations by giving coordinates for all cristallographic regular hyperbolic honeycombs as well as their truncations. This is then used in §5 to find the group whose Cayley diagram is an infinite trivalent symmetrical graph of girth 12. At the Conference on Graph Theory and Combinatorial Analysis held at the University of Waterloo, R. M. Foster [1966] presented a paper which included a table of 176 trivalent symmetrical graphs. Since then there has been a search to find more. A few more of these graphs have been found by Coxeter, Frucht, Harries, and by Foster himself. -

Bridges Conference 2009
The Discovery of a New Series of Uniform Polyhedra. Rinus Roelofs Lansinkweg 28 7553AL Hengelo The Netherlands E-mail: [email protected] www.rinusroelofs.nl Abstract This article describes two new groups of uniform polyhedra as well as the construction of the models of some of them. It is possible that these groups has been discovered before, but I have been unable to find any publication about it. I welcome any information about earlier publication. 1. Introduction 1.1. First discovery. Can you imagine that the object in Figure 1 is a uniform polyhedron? Figure 1: Helical Star Deltahedron 9-4(2). After discovering a series of constructions of this kind, which I called Helical Star Deltahedra I had the idea that these objects are in fact uniform polyhedra. All these helical star deltahedra have two properties in common: they have only regular faces (all faces are equilateral triangles) and all vertices are congruent (at each vertex six triangles are joined together). 1.2. Definition. There are several different definitions in use to describe the group of regular polyhedra. In the paper “An Enduring Error” by Branko Grünbaum [1] this matter is very clearly analysed. In the section about General Polyhedra he quotes Coxeter, Longuet-Higgins and Miller from [2]: A polyhedron is a finite set of [planar] polygons such that every side of each belongs to just one other, with the restriction that no subset has the same property. The polygons and their sides are called faces and edges. The faces are not restricted to be convex, and may surround their centres more than once (as, for example, the pentagram, or five-sided star polygon, which surrounds its centre twice). -

Bridges Conference Proceedings Guidelines
The Elevation of Coxeter’s Infinite Regular Polyhedra Rinus Roelofs Sculptor Lansinkweg 28 7553AL Hengelo The Netherlands E-mail: [email protected] www.rinusroelofs.nl Abstract In their book “La Divina Proportione” [1],[2], Luca Pacioli and Leonardo da Vinci described and illustrated an operation which you can apply to a polyhedron, called Elevation. Starting from Pacioli’s basic idea, resulting in a second layer around a polyhedral shape, we can develop this idea further towards entwined double layer structures. Some of them are single objects, others appear to be compounds. 1. Introduction 1.1. La Divina Proportione. In their book “La Divina Proportione”, published in 1509, Luca Pacioli and Leonardo da Vinci introduced the concept of Elevation, an operation that could be applied on the Platonic polyhedra as well as on the Archimedean polyhedra. The elevated versions of the first two Platonic solids, the tetrahedron and the octahedron, as they are drawn by Leonardo da Vinci, are shown in Figure 1 and 2. Figure 1: Elevated Tetrahedron. Figure 2: Elevated Octahedron. Figure 3: Pacioli’s description. 1.2. Elevation. To understand what Elevation means we have to go to “La Divina Proportione” [3], chapter L, paragraph XIX.XX, where Pacioli describes the elevated version of the octahedron as follows: “And this object is built with 8 three-sided pyramids, that can be seen with your eyes, and an octahedron inside, which you can only see by imagination.”. This means that the object is composed of 32 equilateral triangular faces of which 8 are hidden (Figure 3). Pacioli describes the process of elevation as putting pyramids, built with equilateral triangles, but without the bottom faces, on each of the faces of the polyhedra.