Wythoffian Skeletal Polyhedra in Ordinary Space, I
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

And Twelve-Pointed Star Polygon Design of the Tashkent Scrolls
Bridges 2011: Mathematics, Music, Art, Architecture, Culture A Nine- and Twelve-Pointed Star Polygon Design of the Tashkent Scrolls B. Lynn Bodner Mathematics Department Cedar Avenue Monmouth University West Long Branch, New Jersey, 07764, USA E-mail: [email protected] Abstract In this paper we will explore one of the Tashkent Scrolls’ repeat units, that, when replicated using symmetry operations, creates an overall pattern consisting of “nearly regular” nine-pointed, regular twelve-pointed and irregularly-shaped pentagonal star polygons. We seek to determine how the original designer of this pattern may have determined, without mensuration, the proportion and placement of the star polygons comprising the design. We will do this by proposing a plausible Euclidean “point-joining” compass-and-straightedge reconstruction. Introduction The Tashkent Scrolls (so named because they are housed in Tashkent at the Institute of Oriental Studies at the Academy of Sciences) consist of fragments of architectural sketches attributed to an Uzbek master builder or a guild of architects practicing in 16 th century Bukhara [1, p. 7]. The sketch from the Tashkent Scrolls that we will explore shows only a small portion, or the repeat unit , of a nine- and twelve-pointed star polygon design. It is contained within a rectangle and must be reflected across the boundaries of this rectangle to achieve the entire pattern. This drawing, which for the remainder of this paper we will refer to as “T9N12,” is similar to many of the 114 Islamic architectural and ornamental design sketches found in the much larger, older and better preserved Topkapı Scroll, a 96-foot-long architectural scroll housed at the Topkapı Palace Museum Library in Istanbul. -

How Can You Put Shapes Together to Make Other Shapes?
Lesson 27 Understand Tiling in Rectangles Name: How can you put shapes together to make other shapes? Study the example showing how to put shapes together to make other shapes. Then solve Problems 1–4. Example How can you use smaller shapes to make a circle? Look at the shapes in the green box Draw lines to show how you could use the shapes Write how many of each shape you would need 2 4 1 Draw a line to show how you could use squares like the one in the green box to make a rectangle How many squares would you need? squares 2 Draw lines to show how you could use triangles like the one in the green box to make a rectangle How many triangles would you need? triangles ©Curriculum Associates, LLC Copying is not permitted. Lesson 27 Understand Tiling in Rectangles 283 Solve. 3 Draw lines to show how you could use hexagons to make the first shape below Then show how you could use trapezoids to make the second shape How many of each shape would you need? hexagons trapezoids 4 Draw lines to show how you could use triangles to make the first shape below Then show how you could use trapezoids to make the second shape Then show how you could use rhombuses to make the third shape How many of each shape would you need? triangles trapezoids rhombuses 284 Lesson 27 Understand Tiling in Rectangles ©Curriculum Associates, LLC Copying is not permitted. Lesson 27 Name: Draw and Count Squares Study the example showing how to draw and count squares. -

Symmetry of Fulleroids Stanislav Jendrol’, František Kardoš
Symmetry of Fulleroids Stanislav Jendrol’, František Kardoš To cite this version: Stanislav Jendrol’, František Kardoš. Symmetry of Fulleroids. Klaus D. Sattler. Handbook of Nanophysics: Clusters and Fullerenes, CRC Press, pp.28-1 - 28-13, 2010, 9781420075557. hal- 00966781 HAL Id: hal-00966781 https://hal.archives-ouvertes.fr/hal-00966781 Submitted on 27 Mar 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Symmetry of Fulleroids Stanislav Jendrol’ and Frantiˇsek Kardoˇs Institute of Mathematics, Faculty of Science, P. J. Saf´arikˇ University, Koˇsice Jesenn´a5, 041 54 Koˇsice, Slovakia +421 908 175 621; +421 904 321 185 [email protected]; [email protected] Contents 1 Symmetry of Fulleroids 2 1.1 Convexpolyhedraandplanargraphs . .... 3 1.2 Polyhedral symmetries and graph automorphisms . ........ 4 1.3 Pointsymmetrygroups. 5 1.4 Localrestrictions ............................... .. 10 1.5 Symmetryoffullerenes . .. 11 1.6 Icosahedralfulleroids . .... 12 1.7 Subgroups of Ih ................................. 15 1.8 Fulleroids with multi-pentagonal faces . ......... 16 1.9 Fulleroids with octahedral, prismatic, or pyramidal symmetry ........ 19 1.10 (5, 7)-fulleroids .................................. 20 1 Chapter 1 Symmetry of Fulleroids One of the important features of the structure of molecules is the presence of symmetry elements. -

Equivelar Octahedron of Genus 3 in 3-Space
Equivelar octahedron of genus 3 in 3-space Ruslan Mizhaev ([email protected]) Apr. 2020 ABSTRACT . Building up a toroidal polyhedron of genus 3, consisting of 8 nine-sided faces, is given. From the point of view of topology, a polyhedron can be considered as an embedding of a cubic graph with 24 vertices and 36 edges in a surface of genus 3. This polyhedron is a contender for the maximal genus among octahedrons in 3-space. 1. Introduction This solution can be attributed to the problem of determining the maximal genus of polyhedra with the number of faces - . As is known, at least 7 faces are required for a polyhedron of genus = 1 . For cases ≥ 8 , there are currently few examples. If all faces of the toroidal polyhedron are – gons and all vertices are q-valence ( ≥ 3), such polyhedral are called either locally regular or simply equivelar [1]. The characteristics of polyhedra are abbreviated as , ; [1]. 2. Polyhedron {9, 3; 3} V1. The paper considers building up a polyhedron 9, 3; 3 in 3-space. The faces of a polyhedron are non- convex flat 9-gons without self-intersections. The polyhedron is symmetric when rotated through 1804 around the axis (Fig. 3). One of the features of this polyhedron is that any face has two pairs with which it borders two edges. The polyhedron also has a ratio of angles and faces - = − 1. To describe polyhedra with similar characteristics ( = − 1) we use the Euler formula − + = = 2 − 2, where is the Euler characteristic. Since = 3, the equality 3 = 2 holds true. -

Square Rectangle Triangle Diamond (Rhombus) Oval Cylinder Octagon Pentagon Cone Cube Hexagon Pyramid Sphere Star Circle
SQUARE RECTANGLE TRIANGLE DIAMOND (RHOMBUS) OVAL CYLINDER OCTAGON PENTAGON CONE CUBE HEXAGON PYRAMID SPHERE STAR CIRCLE Powered by: www.mymathtables.com Page 1 what is Rectangle? • A rectangle is a four-sided flat shape where every angle is a right angle (90°). means "right angle" and show equal sides. what is Triangle? • A triangle is a polygon with three edges and three vertices. what is Octagon? • An octagon (eight angles) is an eight-sided polygon or eight-gon. what is Hexagon? • a hexagon is a six-sided polygon or six-gon. The total of the internal angles of any hexagon is 720°. what is Pentagon? • a plane figure with five straight sides and five angles. what is Square? • a plane figure with four equal straight sides and four right angles. • every angle is a right angle (90°) means "right ang le" show equal sides. what is Rhombus? • is a flat shape with four equal straight sides. A rhombus looks like a diamond. All sides have equal length. Opposite sides are parallel, and opposite angles are equal what is Oval? • Many distinct curves are commonly called ovals or are said to have an "oval shape". • Generally, to be called an oval, a plane curve should resemble the outline of an egg or an ellipse. Powered by: www.mymathtables.com Page 2 What is Cube? • Six equal square faces.tweleve edges and eight vertices • the angle between two adjacent faces is ninety. what is Sphere? • no faces,sides,vertices • All points are located at the same distance from the center. what is Cylinder? • two circular faces that are congruent and parallel • faces connected by a curved surface. -

Quadrilateral Theorems
Quadrilateral Theorems Properties of Quadrilaterals: If a quadrilateral is a TRAPEZOID then, 1. at least one pair of opposite sides are parallel(bases) If a quadrilateral is an ISOSCELES TRAPEZOID then, 1. At least one pair of opposite sides are parallel (bases) 2. the non-parallel sides are congruent 3. both pairs of base angles are congruent 4. diagonals are congruent If a quadrilateral is a PARALLELOGRAM then, 1. opposite sides are congruent 2. opposite sides are parallel 3. opposite angles are congruent 4. consecutive angles are supplementary 5. the diagonals bisect each other If a quadrilateral is a RECTANGLE then, 1. All properties of Parallelogram PLUS 2. All the angles are right angles 3. The diagonals are congruent If a quadrilateral is a RHOMBUS then, 1. All properties of Parallelogram PLUS 2. the diagonals bisect the vertices 3. the diagonals are perpendicular to each other 4. all four sides are congruent If a quadrilateral is a SQUARE then, 1. All properties of Parallelogram PLUS 2. All properties of Rhombus PLUS 3. All properties of Rectangle Proving a Trapezoid: If a QUADRILATERAL has at least one pair of parallel sides, then it is a trapezoid. Proving an Isosceles Trapezoid: 1st prove it’s a TRAPEZOID If a TRAPEZOID has ____(insert choice from below) ______then it is an isosceles trapezoid. 1. congruent non-parallel sides 2. congruent diagonals 3. congruent base angles Proving a Parallelogram: If a quadrilateral has ____(insert choice from below) ______then it is a parallelogram. 1. both pairs of opposite sides parallel 2. both pairs of opposite sides ≅ 3. -
Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem (For CBSE, ICSE, IAS, NET, NRA 2022)
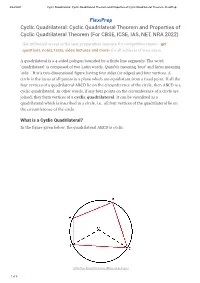
9/22/2021 Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem- FlexiPrep FlexiPrep Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem (For CBSE, ICSE, IAS, NET, NRA 2022) Get unlimited access to the best preparation resource for competitive exams : get questions, notes, tests, video lectures and more- for all subjects of your exam. A quadrilateral is a 4-sided polygon bounded by 4 finite line segments. The word ‘quadrilateral’ is composed of two Latin words, Quadric meaning ‘four’ and latus meaning ‘side’ . It is a two-dimensional figure having four sides (or edges) and four vertices. A circle is the locus of all points in a plane which are equidistant from a fixed point. If all the four vertices of a quadrilateral ABCD lie on the circumference of the circle, then ABCD is a cyclic quadrilateral. In other words, if any four points on the circumference of a circle are joined, they form vertices of a cyclic quadrilateral. It can be visualized as a quadrilateral which is inscribed in a circle, i.e.. all four vertices of the quadrilateral lie on the circumference of the circle. What is a Cyclic Quadrilateral? In the figure given below, the quadrilateral ABCD is cyclic. ©FlexiPrep. Report ©violations @https://tips.fbi.gov/ 1 of 5 9/22/2021 Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem- FlexiPrep Let us do an activity. Take a circle and choose any 4 points on the circumference of the circle. Join these points to form a quadrilateral. Now measure the angles formed at the vertices of the cyclic quadrilateral. -

Applying the Polygon Angle
POLYGONS 8.1.1 – 8.1.5 After studying triangles and quadrilaterals, students now extend their study to all polygons. A polygon is a closed, two-dimensional figure made of three or more non- intersecting straight line segments connected end-to-end. Using the fact that the sum of the measures of the angles in a triangle is 180°, students learn a method to determine the sum of the measures of the interior angles of any polygon. Next they explore the sum of the measures of the exterior angles of a polygon. Finally they use the information about the angles of polygons along with their Triangle Toolkits to find the areas of regular polygons. See the Math Notes boxes in Lessons 8.1.1, 8.1.5, and 8.3.1. Example 1 4x + 7 3x + 1 x + 1 The figure at right is a hexagon. What is the sum of the measures of the interior angles of a hexagon? Explain how you know. Then write an equation and solve for x. 2x 3x – 5 5x – 4 One way to find the sum of the interior angles of the 9 hexagon is to divide the figure into triangles. There are 11 several different ways to do this, but keep in mind that we 8 are trying to add the interior angles at the vertices. One 6 12 way to divide the hexagon into triangles is to draw in all of 10 the diagonals from a single vertex, as shown at right. 7 Doing this forms four triangles, each with angle measures 5 4 3 1 summing to 180°. -

Origin of Icosahedral Symmetry in Viruses
Origin of icosahedral symmetry in viruses Roya Zandi†‡, David Reguera†, Robijn F. Bruinsma§, William M. Gelbart†, and Joseph Rudnick§ Departments of †Chemistry and Biochemistry and §Physics and Astronomy, University of California, Los Angeles, CA 90095-1569 Communicated by Howard Reiss, University of California, Los Angeles, CA, August 11, 2004 (received for review February 2, 2004) With few exceptions, the shells (capsids) of sphere-like viruses (11). This problem is in turn related to one posed much earlier have the symmetry of an icosahedron and are composed of coat by Thomson (12), involving the optimal distribution of N proteins (subunits) assembled in special motifs, the T-number mutually repelling points on the surface of a sphere, and to the structures. Although the synthesis of artificial protein cages is a subsequently posed ‘‘covering’’ problem, where one deter- rapidly developing area of materials science, the design criteria for mines the arrangement of N overlapping disks of minimum self-assembled shells that can reproduce the remarkable properties diameter that allow complete coverage of the sphere surface of viral capsids are only beginning to be understood. We present (13). In a similar spirit, a self-assembly phase diagram has been here a minimal model for equilibrium capsid structure, introducing formulated for adhering hard disks (14). These models, which an explicit interaction between protein multimers (capsomers). all deal with identical capsomers, regularly produced capsid Using Monte Carlo simulation we show that the model reproduces symmetries lower than icosahedral. On the other hand, theo- the main structures of viruses in vivo (T-number icosahedra) and retical studies of viral assembly that assume icosahedral sym- important nonicosahedral structures (with octahedral and cubic metry are able to reproduce the CK motifs (15), and, most symmetry) observed in vitro. -

The Construction, by Euclid, of the Regular Pentagon
THE CONSTRUCTION, BY EUCLID, OF THE REGULAR PENTAGON Jo˜ao Bosco Pitombeira de CARVALHO Instituto de Matem´atica, Universidade Federal do Rio de Janeiro, Cidade Universit´aria, Ilha do Fund˜ao, Rio de Janeiro, Brazil. e-mail: [email protected] ABSTRACT We present a modern account of Ptolemy’s construction of the regular pentagon, as found in a well-known book on the history of ancient mathematics (Aaboe [1]), and discuss how anachronistic it is from a historical point of view. We then carefully present Euclid’s original construction of the regular pentagon, which shows the power of the method of equivalence of areas. We also propose how to use the ideas of this paper in several contexts. Key-words: Regular pentagon, regular constructible polygons, history of Greek mathe- matics, equivalence of areas in Greek mathematics. 1 Introduction This paper presents Euclid’s construction of the regular pentagon, a highlight of the Elements, comparing it with the widely known construction of Ptolemy, as presented by Aaboe [1]. This gives rise to a discussion on how to view Greek mathematics and shows the care on must have when adopting adapting ancient mathematics to modern styles of presentation, in order to preserve not only content but the very way ancient mathematicians thought and viewed mathematics. 1 The material here presented can be used for several purposes. First of all, in courses for prospective teachers interested in using historical sources in their classrooms. In several places, for example Brazil, the history of mathematics is becoming commonplace in the curricula of courses for prospective teachers, and so one needs materials that will awaken awareness of the need to approach ancient mathematics as much as possible in its own terms, and not in some pasteurized downgraded versions. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

Refer to the Figure. 1. If Name Two Congruent Angles. SOLUTION: Isosceles Triangle Theorem States That If Two Sides of T
4-6 Isosceles and Equilateral Triangles Refer to the figure. 1. If name two congruent angles. SOLUTION: Isosceles Triangle Theorem states that if two sides of the triangle are congruent, then the angles opposite those sides are congruent. Therefore, in triangle ABC, ANSWER: BAC and BCA 2. If EAC ECA, name two congruent segments. SOLUTION: Converse of Isosceles Triangle Theorem states that if two angles of a triangle are congruent, then the sides opposite those angles are congruent. Therefore, in triangle EAC, ANSWER: Find each measure. 3. FH SOLUTION: By the Triangle Angle-Sum Theorem, Since the measures of all the three angles are 60°; the triangle must be equiangular. All the equiangular triangles are equilateral. Therefore, FH = GH = 12. ANSWER: 12 eSolutions4. m ManualMRP - Powered by Cognero Page 1 SOLUTION: Since all the sides are congruent, is an equilateral triangle. Each angle of an equilateral triangle measures 60°. Therefore, m MRP = 60°. ANSWER: 60 SENSE-MAKING Find the value of each variable. 5. SOLUTION: In the figure, . Therefore, triangle RST is an isosceles triangle. By the Converse of Isosceles Triangle Theorem, That is, . ANSWER: 12 6. SOLUTION: In the figure, Therefore, triangle WXY is an isosceles triangle. By the Isosceles Triangle Theorem, . ANSWER: 16 7. PROOF Write a two-column proof. Given: is isosceles; bisects ABC. Prove: SOLUTION: ANSWER: 8. ROLLER COASTERS The roller coaster track appears to be composed of congruent triangles. A portion of the track is shown. a. If and are perpendicular to is isosceles with base , and prove that b. If VR = 2.5 meters and QR = 2 meters, find the distance between and Explain your reasoning.