3D CFD Simulation of a Cold Flow Four-Stroke Opposed Piston Engine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Vince Taliano
Cadillac & LaSalle Club Potomac Region Caddie Chronicle August 2015 DIRECTOR’S MESSAGE BY VINCE TALIANO I recently had the pleasure of exchanging 2015 OFFICERS: emails with Walter McCall. What a thrill it REGIONAL DIRECTOR was to learn that he is an avid reader of the NEWSLETTER EDITOR WEBSITE MANAGER Caddie Chronicle. Walter wrote one of the VINCE TALIANO most comprehensive books on the history of ASSISTANT REGIONAL DIRECTOR CAR SHOW COORDINATOR Cadillacs and LaSalles titled “80 Years of DAN RUBY Cadillac LaSalle”. Second-hand issues of NATIONAL DIRECTOR his book on eBay still command a premium NEWSLETTER COLUMNIST JACK MCCLOW price 33 years after it was first published. SECRETARY Thanks, Mr. McCall, for your contributions to ASSOCIATE NEWSLETTER EDITOR SANDY KEMPER the Cadillac community. TREASURER HARRY SCOTT Congratulations to Chris Cummings whose ACTIVITIES DIRECTOR book, “Cadillac V-16s Lost and Found: NEWSLETTER COLUMNIST Tracing the Histories of the 1930s R. SCOT MINESINGER MEMBERSHIP DIRECTORS Classics”, was recently reviewed by Old CENTRAL VA REGION LIAISONS Cars Weekly. Read the review below! NEWSLETTER COLUMNISTS CHUCK & DEBBIE PIEL Classic Car Club of America “Full Classics” have it all: OTHER KEY POSITIONS: style, speed, luxury and personality. Usually, their SUMMER PICNIC HOST owners did as well. It took a big personality to buy a big J. ROGER BENTLEY Classic car during the Great Depression, and the stories AUTOMOBILIA AUCTIONEER of the cars and buyers are often worth retelling. GEORGE BOXLEY Christopher W. Cummings captures those stories and NEWSLETTER COLUMNIST those personalities — both the four-wheeled and the RITA BIAL-BOXLEY two-legged varieties — in his new book, “Cadillac V- NEWSLETTER COLUMNIST 16s Lost and Found: Tracing the Histories of the CHRIS CUMMINGS 1930s Classics.” PHOTOGRAPHER RANDY EDISON As the title implies, Cummings has selected the stories of Full Classic Cadillac V- AUTOMOBILIA AUCTIONEER 16 motorcars, which were built from 1930-1940. -

TIMES MAGAZINE for EARLY FORD ENTHUSIASTS an International Organization Volume 57, Number 6 November/December 2020
TIMES MAGAZINE FOR EARLY FORD ENTHUSIASTS An International Organization Volume 57, Number 6 November/December 2020 1934 Standard Fordor Sedan An International Organization Copyright @ The Early Ford V-8 Club, 2020 P.O. Box 1715 Maple Grove, MN 55311 Volume 57 Number 6 November/December 2020 Contributions of material for publication in the V-8 TIMES are gratefully accepted. It will be assumed they are donated unless other arrangements are made. CONTENTS Inside Departments... From the Oval Office .............................................................................. 1 From the Editor ...................................................................................... 2 Letters ...................................................................................................... 3 Reader’s Reply ........................................................................................ 7 In Transit. ................................................................................................ 11 Early Ford V-8 Foundation .................................................................... 17 Regional Group News ............................................................................. 83 CARrespondence (Tech Advisors) ......................................................... 95 Page 21 Classified Ads ........................................................................................ 103 Features... Opinion .....................................................................................................15 Ford Notes: -

Modernizing the Opposed-Piston, Two-Stroke Engine For
Modernizing the Opposed-Piston, Two-Stroke Engine 2013-26-0114 for Clean, Efficient Transportation Published on 9th -12 th January 2013, SIAT, India Dr. Gerhard Regner, Laurence Fromm, David Johnson, John Kosz ewnik, Eric Dion, Fabien Redon Achates Power, Inc. Copyright © 2013 SAE International and Copyright@ 2013 SIAT, India ABSTRACT Opposed-piston (OP) engines were once widely used in Over the last eight years, Achates Power has perfected the OP ground and aviation applications and continue to be used engine architecture, demonstrating substantial breakthroughs today on ships. Offering both fuel efficiency and cost benefits in combustion and thermal efficiency after more than 3,300 over conventional, four-stroke engines, the OP architecture hours of dynamometer testing. While these breakthroughs also features size and weight advantages. Despite these will initially benefit the commercial and passenger vehicle advantages, however, historical OP engines have struggled markets—the focus of the company’s current development with emissions and oil consumption. Using modern efforts—the Achates Power OP engine is also a good fit for technology, science and engineering, Achates Power has other applications due to its high thermal efficiency, high overcome these challenges. The result: an opposed-piston, specific power and low heat rejection. two-stroke diesel engine design that provides a step-function improvement in brake thermal efficiency compared to conventional engines while meeting the most stringent, DESIGN ATTRIBUTES mandated emissions -
April 2021 VALVE CHATTER
VALVE CHATTER APRIL 2021 Newsletter, Volume 26, Issue 4 Regional Group #148 of the Early Ford V-8 Club of America, Inc Chatter From the President Patsy Hamlin Hopefully everyone has gotten their Covid injections and your waiting period is over as well. Looking forward to getting together as soon as we hear all is well to meet once again. I will be participating in a Zoom meeting with the National Board to cover the guide lines to once again restart our meetings. At this point it it looks promising that we will be able to meet in May. We will put out the information as soon as it is finalized! Tom and I have gotten our Covid injections and our waiting period is over and we have gone out . Last night we met up with Sylvia and Don Harwick at the casino for dinner. We had a great time and it was good to be around people once again. Then today Don called and wanted to come over to our house and another experience we have not had in some time company at our house. Tom showing Don his new acquisition “The 1964 Ranchero” and just sitting around cutting up, thought I would put this picture in the Chatter. Tom and Don sitting together on the love sit. Sylvia and I were not about to give up our chairs so there they are sitting close. As you can see the Muffin man has grown some new hair on his chin, so now we have another fur face in the club. -

The Aircraft Propulsion the Aircraft Propulsion
THE AIRCRAFT PROPULSION Aircraft propulsion Contact: Ing. Miroslav Šplíchal, Ph.D. [email protected] Office: A1/0427 Aircraft propulsion Organization of the course Topics of the lectures: 1. History of AE, basic of thermodynamic of heat engines, 2-stroke and 4-stroke cycle 2. Basic parameters of piston engines, types of piston engines 3. Design of piston engines, crank mechanism, 4. Design of piston engines - auxiliary systems of piston engines, 5. Performance characteristics increase performance, propeller. 6. Turbine engines, introduction, input system, centrifugal compressor. 7. Turbine engines - axial compressor, combustion chamber. 8. Turbine engines – turbine, nozzles. 9. Turbine engines - increasing performance, construction of gas turbine engines, 10. Turbine engines - auxiliary systems, fuel-control system. 11. Turboprop engines, gearboxes, performance. 12. Maintenance of turbine engines 13. Ramjet engines and Rocket engines Aircraft propulsion Organization of the course Topics of the seminars: 1. Basic parameters of piston engine + presentation (1-7)- 3.10.2017 2. Parameters of centrifugal flow compressor + presentation(8-14) - 17.10.2017 3. Loading of turbine blade + presentation (15-21)- 31.10.2017 4. Jet engine cycle + presentation (22-28) - 14.11.2017 5. Presentation alternative date Seminar work: Aircraft engines presentation A short PowerPoint presentation, aprox. 10 minutes long. Content of presentation: - a brief history of the engine - the main innovation introduced by engine - engine drawing / cross-section - -

Upcoming Auction!
Auctioneers Note: On December AUCTION LOCATION: 3rd, Come bid your price on a great Hiawatha Valley, 2301 Road 4 NE Moses Lake, WA 98837 selection of Estate Items. Life Auction Directions: Head west of Moses Lake on I-90. Travel 9 miles to exit 169 (Hi- circumstances necessitate a short awatha Rd.) Exit and turn right (N) and drive 3 miles to Rd. 4 NE. Turn right (E) and go 1/3 notice auction of 39 Classic Cars, John of a mile to sale site on right (S) side of road. Please observe auction signs. Deere and other Vintage Tractors, Drug Seizure Vehicles, GCSO Surplus Equipment, Vintage Memorabilia, HD Shop Machinery, Hand Tools, and More! Please take advantage of our website Chuck Yarbro Auctioneers for videos of equipment & vehicles 213 S. Beech Street functioning! Moses Lake, WA 98837 Terms: 10% Buyer’s Premium up to Office: 509.765.6869 $2,500 Per item. For more info. and Fax: 509.765.1531 Terms, go to Yarbro.com. Sales Tax collected on all items. Chuck Yarbro, Jr. - 509.760.3789 Jake Barth - 509.398.6079 LIVE INTERNET BIDDING You may place bids online up to 8am Se Habla Española auction day at www.yarbro.com. 3 Auction RINGS - 2 Simulcast RINGS Abel Valdez - 509.760.3041 For information on registering to bid RING 1 - Simulcast Bidding - Lots 1-324 Starts at 8:45am; Small & Chuck Yarbro, Sr. - 509.750.1277 online, call 509.765.6869. Large Shop Tools, Horse Tack, Wagons and Vintage Farm Equipment RING 2 - Simulcast Bidding - Lots 500-650 Starts at 9am; Memorabilia, Drug Seizures at 10am, Estate Vehicles & Equipment, GCSO Surplus & Classic & Restro Vehicles, Vintage Tractors RING 3 – Non Internet - Lots 1,000 and Up Starts at 8:45am; Livestock, Stihl & Other Lawn Equipment & Misc. -
October 2020
* The Spoke’N Word BATHURST HISTORIC CAR CLUB OCTOBER 2020 www.bathursthistoriccarclub.com SAD TO SAY FOLKS, THE MEETINGS ARE STILL ONLY HELD ON ZOOM. Sofala Run 13th. There are more coming Pat Main St Sofala. On a busy day. Zoom meeting this month, details in side. President Words from the Presidents Message David White 0419 765 819 Good morning all, [email protected] Well 7 months into the new " normal " some things are changing - others not so. I note the Bay Vice President to Birdwood rally has gone ahead but closer to Jim Pitcher 0418 456 975 home the Parkes Elvis festival that was originally [email protected] put back to March has been cancelled for 2021. Looks like we will be holding our meeting via Secretary zoom for quite some time - as usual Ted Reedy 0417 222 997 Brian Leis will send you an e-mail with the log-in details. [email protected] Should you have any trouble logging in give Ted a ring (0438324253) and he will walk you through Public Officer the process. Peter Robinson 0437 030 782 We have held both our Sunday run and coffee run this month - both were well attended under the Treasurer circumstances and were enjoyed by all. Note next 0467 320 032 Elliot Redwin. month’s Sunday run will be held a week earlier [email protected] than usual (11th) so we don't clash with the postponed Supercheap 1000. Coffee run will be as Editor. usual (28th). Pat Chris & Pat have booked a Ray Green 0429 471 138 mine tour at Lucknow for the 7th November - they [email protected] need to know numbers - details in events column. -
2006 Amelia Island Concourse D'elegance by James Dorsey
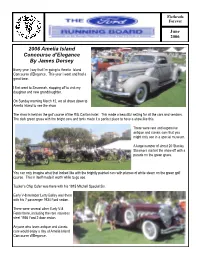
Flatheads Forever June 2006 2006 Amelia Island Concourse d’Elegance By James Dorsey Every year I say that I’m going to Amelia Island Concourse d’Elegance. This year I went and had a great time. I first went to Savannah, stopping off to visit my daughter and new granddaughter. On Sunday morning March 12, we all drove down to Amelia Island to see the show. The show is held on the golf course of the Ritz Carlton hotel. This made a beautiful setting for all the cars and vendors. The dark green grass with the bright cars and tents made it a perfect place to have a show like this. There were rare and expensive antique and classic cars that you might only see in a special museum. A large number of about 20 Stanley Steamers started the show off with a parade on the green grass. You can only imagine what that looked like with the brightly painted cars with plumes of white steam on the green golf course. This in itself made it worth while to go see. Tucker’s Chip Cofer was there with his 1915 Mitchell Special Six. Early V-8 member Larry Bailey was there with his 7 passenger 1934 Ford sedan. There were several other Early V-8 Fords there, including the rare stainless steel 1936 Ford 2 door sedan. Anyone who loves antique and classic cars would enjoy a day at Amelia Island Concourse d’Elegance. The Editor’s Desk: July Monthly Meeting Sunshine Report!! Mary Ann Padovano has volunteered be The Sunshine Committee for the club. -

Design of an Opposed-Piston, Opposed-Stroke Diesel Engine for Use in Utility Aircraft
University of Dayton eCommons Honors Theses University Honors Program 5-2017 Design of an Opposed-piston, Opposed-stroke Diesel Engine for Use in Utility Aircraft Luke Kozal University of Dayton Follow this and additional works at: https://ecommons.udayton.edu/uhp_theses Part of the Aerospace Engineering Commons, and the Mechanical Engineering Commons eCommons Citation Kozal, Luke, "Design of an Opposed-piston, Opposed-stroke Diesel Engine for Use in Utility Aircraft" (2017). Honors Theses. 113. https://ecommons.udayton.edu/uhp_theses/113 This Honors Thesis is brought to you for free and open access by the University Honors Program at eCommons. It has been accepted for inclusion in Honors Theses by an authorized administrator of eCommons. For more information, please contact [email protected], [email protected]. Design of an Opposed-piston, Opposed-stroke Diesel Engine for Use in Utility Aircraft Honors Thesis Luke Kozal Department: Mechanical Engineering Advisors: Andrew Murray, Ph.D. David Myszka, Ph.D. Paul Litke, AFRL/RQTC May 2017 Design of an Opposed-piston, Opposed-stroke Diesel Engine for Use in Utility Aircraft Luke Kozal Department: Mechanical Engineering Advisor: Andrew Murray, Ph.D. David Myszka, Ph.D. Paul Litke, AFRL/RQTC May 2017 Abstract The objective of this thesis was to determine the feasibility of using an opposed-piston, opposed-stroke, diesel engine in utility aircraft. Utility aircraft are aircraft that have a maximal takeoff weight of 12,500lbs. These aircraft are often used for transportation of cargo and other goods. In order to handle that weight, many of the aircraft are powered by turboprop engines. Turboprop engines are a style of jet engine with power capabilities ranging from 500 to several thousand horsepower (hp). -
GTP-19-1645 Final PDF Document.PDF
Citation for published version: Turner, J, Head, R, Wijetunge, R, Chang, J, Engineer, N, Blundell, D & Burke, P 2020, 'Analysis of different uniflow scavenging options for a medium-duty 2-stroke engine for a U.S. light-truck application', Journal of Engineering for Gas Turbines and Power, vol. 142, no. 10, 101011. https://doi.org/10.1115/1.4046711 DOI: 10.1115/1.4046711 Publication date: 2020 Document Version Peer reviewed version Link to publication Publisher Rights CC BY Turner, J. W. G., Head, R. A., Wijetunge, R., Chang, J., Engineer, N., Blundell, D. W., and Burke, P. (September 29, 2020). "Analysis of Different Uniflow Scavenging Options for a Medium-Duty 2-Stroke Engine for a U.S. Light-Truck Application." ASME. J. Eng. Gas Turbines Power. October 2020; 142(10): 101011. https://doi.org/10.1115/1.4046711 University of Bath Alternative formats If you require this document in an alternative format, please contact: [email protected] General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Download date: 02. Oct. 2021 GTP-19-1645 ANALYSIS OF DIFFERENT UNIFLOW SCAVENGING OPTIONS FOR A MEDIUM-DUTY 2-STROKE ENGINE FOR A U.S. LIGHT-TRUCK APPLICATION J.W.G. -

Anra Big Spring Nationals
ANRA BIG SPRING NATIONALS Nostalgic drag racing was going strong at the Famoso Raceway The American Nostalgia Racing Association held the Association and event so Greg was there to an- the Big Spring Nationals at Famoso Raceway just swer any questions other participants had about outside of Bakersfield, California on the weekend Wilwood’s complete line of lightweight drag racing of June 19th and 20th. The event was well at- brakes. While Greg was busy working on his car, tended and everyone was enjoying the warm Cal- his wife, Patti took some pictures of the cars that ifornia weather. Wilwood’s Greg Hyatt was at the were racing. If you would like to learn more about show racing his 10-second roadster. Wilwood En- the association or would like to join with your drag gineering is one of the sponsors of car, contact the club’s website: www.anra.com. This nice ’29 Ford drag roadster has a very classic appear- Here’s another nicely detailed altered roadster that’s ready ance with the rear magnesium wheels and I-beam style for some quarter mile action. The matching top is optional. front suspension. This roadster looks great and it is a strong runner. This ’55 Chevy two-door sedan looks like it would be right at A very powerful fuel injected Ford Flathead engine powers home at a cruise night or car show, but it’s kind of a sleeper. this little dragster. The highly detailed car is a looker as well This tri-year Chevy is faster than it looks like it would be. -

National Air & Space Museum Technical Reference Files: Propulsion
National Air & Space Museum Technical Reference Files: Propulsion NASM Staff 2017 National Air and Space Museum Archives 14390 Air & Space Museum Parkway Chantilly, VA 20151 [email protected] https://airandspace.si.edu/archives Table of Contents Collection Overview ........................................................................................................ 1 Scope and Contents........................................................................................................ 1 Accessories...................................................................................................................... 1 Engines............................................................................................................................ 1 Propellers ........................................................................................................................ 2 Space Propulsion ............................................................................................................ 2 Container Listing ............................................................................................................. 3 Series B3: Propulsion: Accessories, by Manufacturer............................................. 3 Series B4: Propulsion: Accessories, General........................................................ 47 Series B: Propulsion: Engines, by Manufacturer.................................................... 71 Series B2: Propulsion: Engines, General............................................................