Flexible Polyhedra with Two Degrees of Freedom
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Equivelar Octahedron of Genus 3 in 3-Space
Equivelar octahedron of genus 3 in 3-space Ruslan Mizhaev ([email protected]) Apr. 2020 ABSTRACT . Building up a toroidal polyhedron of genus 3, consisting of 8 nine-sided faces, is given. From the point of view of topology, a polyhedron can be considered as an embedding of a cubic graph with 24 vertices and 36 edges in a surface of genus 3. This polyhedron is a contender for the maximal genus among octahedrons in 3-space. 1. Introduction This solution can be attributed to the problem of determining the maximal genus of polyhedra with the number of faces - . As is known, at least 7 faces are required for a polyhedron of genus = 1 . For cases ≥ 8 , there are currently few examples. If all faces of the toroidal polyhedron are – gons and all vertices are q-valence ( ≥ 3), such polyhedral are called either locally regular or simply equivelar [1]. The characteristics of polyhedra are abbreviated as , ; [1]. 2. Polyhedron {9, 3; 3} V1. The paper considers building up a polyhedron 9, 3; 3 in 3-space. The faces of a polyhedron are non- convex flat 9-gons without self-intersections. The polyhedron is symmetric when rotated through 1804 around the axis (Fig. 3). One of the features of this polyhedron is that any face has two pairs with which it borders two edges. The polyhedron also has a ratio of angles and faces - = − 1. To describe polyhedra with similar characteristics ( = − 1) we use the Euler formula − + = = 2 − 2, where is the Euler characteristic. Since = 3, the equality 3 = 2 holds true. -

What Lies Between Rigidity and Flexibility of Structures
S A J _ 2011 _ 3 _ original scientific article approval date 03 05 2011 UDK BROJEVI: 514.113.5 ; 614.073.5.042 ID BROJ: 184974860 WHAT LIES BETWEEN RIGIDITY AND FLEXIBILITY OF STRUCTURES A B S T R A C T The borderline between continuous flexibility and rigidity of structures like polyhedra or frameworks is not strict. There can be different levels of infinitesimal flexibility. This article presents the mathematical background and some examples of structures which under particular conditions are flexible or almost flexible and otherwise rigid. Hellmuth Stachel 102 KEY WORDS Vienna University of Technology - Institute of Discrete Mathematics and Geometry RIGIDITY FLEXIBILITY INFINITESIMAL FLEXIBILITY FLEXIBLE POLYHEDRA SNAPPING POLYHEDRA KOKOTSAKIS MESHES ORIGAMI MECHANISMS S A J _ 2011 _ 3 _ INTRODUCTION A framework or a polyhedron will be called “rigid” when the edge lengths determine its planar or spatial shape uniquely; under the term “shape” we mean its spatial form – apart from movements in space. More generally and under inclusion of smooth or piecewise linear surfaces, a structure is called rigid when its intrinsic metric defines its spatial shape uniquely. In this sense, the intrinsic metric of a polyhedron is defined by its net (unfolding), i.e., the coplanar set of faces with identified pairs of edges originating from the same edge of the spatial form. After cutting out this net from paper or cardboard, a paper- or cardboard-model of this polyhedron can be built in the usual way. Does such a net really define the shape of a polyhedron uniquely? Think of a cube where one face is replaced by a four-sided pyramid with a small height. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

Shape Skeletons Creating Polyhedra with Straws
Shape Skeletons Creating Polyhedra with Straws Topics: 3-Dimensional Shapes, Regular Solids, Geometry Materials List Drinking straws or stir straws, cut in Use simple materials to investigate regular or advanced 3-dimensional shapes. half Fun to create, these shapes make wonderful showpieces and learning tools! Paperclips to use with the drinking Assembly straws or chenille 1. Choose which shape to construct. Note: the 4-sided tetrahedron, 8-sided stems to use with octahedron, and 20-sided icosahedron have triangular faces and will form sturdier the stir straws skeletal shapes. The 6-sided cube with square faces and the 12-sided Scissors dodecahedron with pentagonal faces will be less sturdy. See the Taking it Appropriate tool for Further section. cutting the wire in the chenille stems, Platonic Solids if used This activity can be used to teach: Common Core Math Tetrahedron Cube Octahedron Dodecahedron Icosahedron Standards: Angles and volume Polyhedron Faces Shape of Face Edges Vertices and measurement Tetrahedron 4 Triangles 6 4 (Measurement & Cube 6 Squares 12 8 Data, Grade 4, 5, 6, & Octahedron 8 Triangles 12 6 7; Grade 5, 3, 4, & 5) Dodecahedron 12 Pentagons 30 20 2-Dimensional and 3- Dimensional Shapes Icosahedron 20 Triangles 30 12 (Geometry, Grades 2- 12) 2. Use the table and images above to construct the selected shape by creating one or Problem Solving and more face shapes and then add straws or join shapes at each of the vertices: Reasoning a. For drinking straws and paperclips: Bend the (Mathematical paperclips so that the 2 loops form a “V” or “L” Practices Grades 2- shape as needed, widen the narrower loop and insert 12) one loop into the end of one straw half, and the other loop into another straw half. -

A Theory of Nets for Polyhedra and Polytopes Related to Incidence Geometries
Designs, Codes and Cryptography, 10, 115–136 (1997) c 1997 Kluwer Academic Publishers, Boston. Manufactured in The Netherlands. A Theory of Nets for Polyhedra and Polytopes Related to Incidence Geometries SABINE BOUZETTE C. P. 216, Universite´ Libre de Bruxelles, Bd du Triomphe, B-1050 Bruxelles FRANCIS BUEKENHOUT [email protected] C. P. 216, Universite´ Libre de Bruxelles, Bd du Triomphe, B-1050 Bruxelles EDMOND DONY C. P. 216, Universite´ Libre de Bruxelles, Bd du Triomphe, B-1050 Bruxelles ALAIN GOTTCHEINER C. P. 216, Universite´ Libre de Bruxelles, Bd du Triomphe, B-1050 Bruxelles Communicated by: D. Jungnickel Received November 22, 1995; Revised July 26, 1996; Accepted August 13, 1996 Dedicated to Hanfried Lenz on the occasion of his 80th birthday. Abstract. Our purpose is to elaborate a theory of planar nets or unfoldings for polyhedra, its generalization and extension to polytopes and to combinatorial polytopes, in terms of morphisms of geometries and the adjacency graph of facets. Keywords: net, polytope, incidence geometry, prepolytope, category 1. Introduction Planar nets for various polyhedra are familiar both for practical matters and for mathematical education about age 11–14. They are systematised in two directions. The most developed of these consists in the drawing of some net for each polyhedron in a given collection (see for instance [20], [21]). A less developed theme is to enumerate all nets for a given polyhedron, up to some natural equivalence. Little has apparently been done for polytopes in dimensions d 4 (see however [18], [3]). We have found few traces of this subject in the literature and we would be grateful for more references. -

VOLUME of POLYHEDRA USING a TETRAHEDRON BREAKUP We
VOLUME OF POLYHEDRA USING A TETRAHEDRON BREAKUP We have shown in an earlier note that any two dimensional polygon of N sides may be broken up into N-2 triangles T by drawing N-3 lines L connecting every second vertex. Thus the irregular pentagon shown has N=5,T=3, and L=2- With this information, one is at once led to the question-“ How can the volume of any polyhedron in 3D be determined using a set of smaller 3D volume elements”. These smaller 3D eelements are likely to be tetrahedra . This leads one to the conjecture that – A polyhedron with more four faces can have its volume represented by the sum of a certain number of sub-tetrahedra. The volume of any tetrahedron is given by the scalar triple product |V1xV2∙V3|/6, where the three Vs are vector representations of the three edges of the tetrahedron emanating from the same vertex. Here is a picture of one of these tetrahedra- Note that the base area of such a tetrahedron is given by |V1xV2]/2. When this area is multiplied by 1/3 of the height related to the third vector one finds the volume of any tetrahedron given by- x1 y1 z1 (V1xV2 ) V3 Abs Vol = x y z 6 6 2 2 2 x3 y3 z3 , where x,y, and z are the vector components. The next question which arises is how many tetrahedra are required to completely fill a polyhedron? We can arrive at an answer by looking at several different examples. Starting with one of the simplest examples consider the double-tetrahedron shown- It is clear that the entire volume can be generated by two equal volume tetrahedra whose vertexes are placed at [0,0,sqrt(2/3)] and [0,0,-sqrt(2/3)]. -
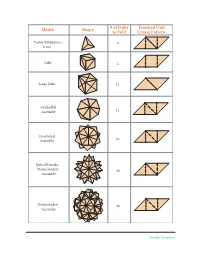
Sonobe Assembly Guide for a Few Polyhedra
Model Shape # of Units Finished Unit to Fold Crease Pattern Toshie Takahama’s 3 Jewel Cube 6 Large Cube 12 Octahedral Assembly 12 Icosahedral Assembly 30 Spiked Pentakis Dodecahedral 60 Assembly Dodecahedral 90 Assembly 2 Sonobe Variations Sonobe Assembly Basics Sonobe assemblies are essentially “pyramidized” constructing a polyhedron, the key thing to re- polyhedra, each pyramid consisting of three So- member is that the diagonal ab of each Sonobe nobe units. The figure below shows a generic So- unit will lie along an edge of the polyhedron. nobe unit and how to form one pyramid. When a Pocket Tab Forming one Tab pyramid Pocket b A generic Sonobe unit representation Sonobe Assembly Guide for a Few Polyhedra 1. Toshie’s Jewel: Crease three finished units as tabs and pockets. This assembly is also sometimes explained in the table on page 2. Form a pyramid known as a Crane Egg. as above. Then turn the assembly upside down 2. Cube Assembly: Crease six finished units as and make another pyramid with the three loose explained in the table on page 2. Each face will be made up of 3 the center square of one unit and the tabs of two other units. 4 Do Steps 1 and 2 to form one face. Do Steps 3 and 4 to form one corner or vertex. Continue 1 2 interlocking in this manner to arrive at the finished cube. Sonobe Variations 3 3. Large Cube Assembly: Crease 12 finished units as explained on page 2. 5 6 3 The 12-unit large cube is the only assembly that does not involve pyramidizing. -

Just (Isomorphic) Friends: Symmetry Groups of the Platonic Solids
Just (Isomorphic) Friends: Symmetry Groups of the Platonic Solids Seth Winger Stanford University|MATH 109 9 March 2012 1 Introduction The Platonic solids have been objects of interest to mankind for millennia. Each shape—five in total|is made up of congruent regular polygonal faces: the tetrahedron (four triangular sides), the cube (six square sides), the octahedron (eight triangular sides), the dodecahedron (twelve pentagonal sides), and the icosahedron (twenty triangular sides). They are prevalent in everything from Plato's philosophy, where he equates them to the four classical elements and a fifth heavenly aether, to middle schooler's role playing games, where Platonic dice determine charisma levels and who has to get the next refill of Mountain Dew. Figure 1: The five Platonic solids (http://geomag.elementfx.com) In this paper, we will examine the symmetry groups of these five solids, starting with the relatively simple case of the tetrahedron and moving on to the more complex shapes. The rotational symmetry groups of the solids share many similarities with permutation groups, and these relationships will be shown to be an isomorphism that can then be exploited when discussing the Platonic solids. The end goal is the most complex case: describing the symmetries of the icosahedron in terms of A5, the group of all sixty even permutations in the permutation group of degree 5. 2 The Tetrahedron Imagine a tetrahedral die, where each vertex is labeled 1, 2, 3, or 4. Two or three rolls of the die will show that rotations can induce permutations of the vertices|a different number may land face up on every throw, for example|but how many such rotations and permutations exist? There are two main categories of rotation in a tetrahedron: r, those around an axis that runs from a vertex of the solid to the centroid of the opposing face; and q, those around an axis that runs from midpoint to midpoint of opposing edges (see Figure 2). -

A Survey of Folding and Unfolding in Computational Geometry
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 A Survey of Folding and Unfolding in Computational Geometry ERIK D. DEMAINE AND JOSEPH O’ROURKE Abstract. We survey results in a recent branch of computational geome- try: folding and unfolding of linkages, paper, and polyhedra. Contents 1. Introduction 168 2. Linkages 168 2.1. Definitions and fundamental questions 168 2.2. Fundamental questions in 2D 171 2.3. Fundamental questions in 3D 175 2.4. Fundamental questions in 4D and higher dimensions 181 2.5. Protein folding 181 3. Paper 183 3.1. Categorization 184 3.2. Origami design 185 3.3. Origami foldability 189 3.4. Flattening polyhedra 191 4. Polyhedra 193 4.1. Unfolding polyhedra 193 4.2. Folding polygons into convex polyhedra 196 4.3. Folding nets into nonconvex polyhedra 199 4.4. Continuously folding polyhedra 200 5. Conclusion and Higher Dimensions 201 Acknowledgements 202 References 202 Demaine was supported by NSF CAREER award CCF-0347776. O’Rourke was supported by NSF Distinguished Teaching Scholars award DUE-0123154. 167 168 ERIKD.DEMAINEANDJOSEPHO’ROURKE 1. Introduction Folding and unfolding problems have been implicit since Albrecht D¨urer [1525], but have not been studied extensively in the mathematical literature until re- cently. Over the past few years, there has been a surge of interest in these problems in discrete and computational geometry. This paper gives a brief sur- vey of most of the work in this area. Related, shorter surveys are [Connelly and Demaine 2004; Demaine 2001; Demaine and Demaine 2002; O’Rourke 2000]. We are currently preparing a monograph on the topic [Demaine and O’Rourke ≥ 2005]. -
![Arxiv:2105.14305V1 [Cs.CG] 29 May 2021](https://docslib.b-cdn.net/cover/2277/arxiv-2105-14305v1-cs-cg-29-may-2021-1052277.webp)
Arxiv:2105.14305V1 [Cs.CG] 29 May 2021
Efficient Folding Algorithms for Regular Polyhedra ∗ Tonan Kamata1 Akira Kadoguchi2 Takashi Horiyama3 Ryuhei Uehara1 1 School of Information Science, Japan Advanced Institute of Science and Technology (JAIST), Ishikawa, Japan fkamata,[email protected] 2 Intelligent Vision & Image Systems (IVIS), Tokyo, Japan [email protected] 3 Faculty of Information Science and Technology, Hokkaido University, Hokkaido, Japan [email protected] Abstract We investigate the folding problem that asks if a polygon P can be folded to a polyhedron Q for given P and Q. Recently, an efficient algorithm for this problem has been developed when Q is a box. We extend this idea to regular polyhedra, also known as Platonic solids. The basic idea of our algorithms is common, which is called stamping. However, the computational complexities of them are different depending on their geometric properties. We developed four algorithms for the problem as follows. (1) An algorithm for a regular tetrahedron, which can be extended to a tetramonohedron. (2) An algorithm for a regular hexahedron (or a cube), which is much efficient than the previously known one. (3) An algorithm for a general deltahedron, which contains the cases that Q is a regular octahedron or a regular icosahedron. (4) An algorithm for a regular dodecahedron. Combining these algorithms, we can conclude that the folding problem can be solved pseudo-polynomial time when Q is a regular polyhedron and other related solid. Keywords: Computational origami folding problem pseudo-polynomial time algorithm regular poly- hedron (Platonic solids) stamping 1 Introduction In 1525, the German painter Albrecht D¨urerpublished his masterwork on geometry [5], whose title translates as \On Teaching Measurement with a Compass and Straightedge for lines, planes, and whole bodies." In the book, he presented each polyhedron by drawing a net, which is an unfolding of the surface of the polyhedron to a planar layout without overlapping by cutting along its edges. -

The Platonic Solids
The Platonic Solids William Wu [email protected] March 12 2004 The tetrahedron, the cube, the octahedron, the dodecahedron, and the icosahedron. From a ¯rst glance, one immediately notices that the Platonic Solids exhibit remarkable symmetry. They are the only convex polyhedra for which the same same regular polygon is used for each face, and the same number of faces meet at each vertex. Their symmetries are aesthetically pleasing, like those of stones cut by a jeweler. We can further enhance our appreciation of these solids by examining them under the lenses of group theory { the mathematical study of symmetry. This article will discuss the group symmetries of the Platonic solids using a variety of concepts, including rotations, reflections, permutations, matrix groups, duality, homomorphisms, and representations. 1 The Tetrahedron 1.1 Rotations We will begin by studying the symmetries of the tetrahedron. If we ¯rst restrict ourselves to rotational symmetries, we ask, \In what ways can the tetrahedron be rotated such that the result appears identical to what we started with?" The answer is best elucidated with the 1 Figure 1: The Tetrahedron: Identity Permutation aid of Figure 1. First consider the rotational axis OA, which runs from the topmost vertex through the center of the base. Note that we can repeatedly rotate the tetrahedron about 360 OA by 3 = 120 degrees to ¯nd two new symmetries. Since each face of the tetrahedron can be pierced with an axis in this fashion, we have found 4 £ 2 = 8 new symmetries. Figure 2: The Tetrahedron: Permutation (14)(23) Now consider rotational axis OB, which runs from the midpoint of one edge to the midpoint of the opposite edge. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals.