Of Rigid Motions) to Make the Simplest Possible Analogies Between Euclidean, Spherical,Toroidal and Hyperbolic Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Proofs with Perpendicular Lines
3.4 Proofs with Perpendicular Lines EEssentialssential QQuestionuestion What conjectures can you make about perpendicular lines? Writing Conjectures Work with a partner. Fold a piece of paper D in half twice. Label points on the two creases, as shown. a. Write a conjecture about AB— and CD — . Justify your conjecture. b. Write a conjecture about AO— and OB — . AOB Justify your conjecture. C Exploring a Segment Bisector Work with a partner. Fold and crease a piece A of paper, as shown. Label the ends of the crease as A and B. a. Fold the paper again so that point A coincides with point B. Crease the paper on that fold. b. Unfold the paper and examine the four angles formed by the two creases. What can you conclude about the four angles? B Writing a Conjecture CONSTRUCTING Work with a partner. VIABLE a. Draw AB — , as shown. A ARGUMENTS b. Draw an arc with center A on each To be prof cient in math, side of AB — . Using the same compass you need to make setting, draw an arc with center B conjectures and build a on each side of AB— . Label the C O D logical progression of intersections of the arcs C and D. statements to explore the c. Draw CD — . Label its intersection truth of your conjectures. — with AB as O. Write a conjecture B about the resulting diagram. Justify your conjecture. CCommunicateommunicate YourYour AnswerAnswer 4. What conjectures can you make about perpendicular lines? 5. In Exploration 3, f nd AO and OB when AB = 4 units. -

Examples of Manifolds
Examples of Manifolds Example 1 (Open Subset of IRn) Any open subset, O, of IRn is a manifold of dimension n. One possible atlas is A = (O, ϕid) , where ϕid is the identity map. That is, ϕid(x) = x. n Of course one possible choice of O is IR itself. Example 2 (The Circle) The circle S1 = (x,y) ∈ IR2 x2 + y2 = 1 is a manifold of dimension one. One possible atlas is A = {(U , ϕ ), (U , ϕ )} where 1 1 1 2 1 y U1 = S \{(−1, 0)} ϕ1(x,y) = arctan x with − π < ϕ1(x,y) <π ϕ1 1 y U2 = S \{(1, 0)} ϕ2(x,y) = arctan x with 0 < ϕ2(x,y) < 2π U1 n n n+1 2 2 Example 3 (S ) The n–sphere S = x =(x1, ··· ,xn+1) ∈ IR x1 +···+xn+1 =1 n A U , ϕ , V ,ψ i n is a manifold of dimension . One possible atlas is 1 = ( i i) ( i i) 1 ≤ ≤ +1 where, for each 1 ≤ i ≤ n + 1, n Ui = (x1, ··· ,xn+1) ∈ S xi > 0 ϕi(x1, ··· ,xn+1)=(x1, ··· ,xi−1,xi+1, ··· ,xn+1) n Vi = (x1, ··· ,xn+1) ∈ S xi < 0 ψi(x1, ··· ,xn+1)=(x1, ··· ,xi−1,xi+1, ··· ,xn+1) n So both ϕi and ψi project onto IR , viewed as the hyperplane xi = 0. Another possible atlas is n n A2 = S \{(0, ··· , 0, 1)}, ϕ , S \{(0, ··· , 0, −1)},ψ where 2x1 2xn ϕ(x , ··· ,xn ) = , ··· , 1 +1 1−xn+1 1−xn+1 2x1 2xn ψ(x , ··· ,xn ) = , ··· , 1 +1 1+xn+1 1+xn+1 are the stereographic projections from the north and south poles, respectively. -

An Introduction to Topology the Classification Theorem for Surfaces by E
An Introduction to Topology An Introduction to Topology The Classification theorem for Surfaces By E. C. Zeeman Introduction. The classification theorem is a beautiful example of geometric topology. Although it was discovered in the last century*, yet it manages to convey the spirit of present day research. The proof that we give here is elementary, and its is hoped more intuitive than that found in most textbooks, but in none the less rigorous. It is designed for readers who have never done any topology before. It is the sort of mathematics that could be taught in schools both to foster geometric intuition, and to counteract the present day alarming tendency to drop geometry. It is profound, and yet preserves a sense of fun. In Appendix 1 we explain how a deeper result can be proved if one has available the more sophisticated tools of analytic topology and algebraic topology. Examples. Before starting the theorem let us look at a few examples of surfaces. In any branch of mathematics it is always a good thing to start with examples, because they are the source of our intuition. All the following pictures are of surfaces in 3-dimensions. In example 1 by the word “sphere” we mean just the surface of the sphere, and not the inside. In fact in all the examples we mean just the surface and not the solid inside. 1. Sphere. 2. Torus (or inner tube). 3. Knotted torus. 4. Sphere with knotted torus bored through it. * Zeeman wrote this article in the mid-twentieth century. 1 An Introduction to Topology 5. -

The Sphere Project
;OL :WOLYL 7YVQLJ[ +XPDQLWDULDQ&KDUWHUDQG0LQLPXP 6WDQGDUGVLQ+XPDQLWDULDQ5HVSRQVH ;OL:WOLYL7YVQLJ[ 7KHULJKWWROLIHZLWKGLJQLW\ ;OL:WOLYL7YVQLJ[PZHUPUP[PH[P]L[VKL[LYTPULHUK WYVTV[LZ[HUKHYKZI`^OPJO[OLNSVIHSJVTT\UP[` /\THUP[HYPHU*OHY[LY YLZWVUKZ[V[OLWSPNO[VMWLVWSLHMMLJ[LKI`KPZHZ[LYZ /\THUP[HYPHU >P[O[OPZ/HUKIVVR:WOLYLPZ^VYRPUNMVYH^VYSKPU^OPJO [OLYPNO[VMHSSWLVWSLHMMLJ[LKI`KPZHZ[LYZ[VYLLZ[HISPZO[OLPY *OHY[LYHUK SP]LZHUKSP]LSPOVVKZPZYLJVNUPZLKHUKHJ[LK\WVUPU^H`Z[OH[ YLZWLJ[[OLPY]VPJLHUKWYVTV[L[OLPYKPNUP[`HUKZLJ\YP[` 4PUPT\T:[HUKHYKZ This Handbook contains: PU/\THUP[HYPHU (/\THUP[HYPHU*OHY[LY!SLNHSHUKTVYHSWYPUJPWSLZ^OPJO HUK YLÅLJ[[OLYPNO[ZVMKPZHZ[LYHMMLJ[LKWVW\SH[PVUZ 4PUPT\T:[HUKHYKZPU/\THUP[HYPHU9LZWVUZL 9LZWVUZL 7YV[LJ[PVU7YPUJPWSLZ *VYL:[HUKHYKZHUKTPUPT\TZ[HUKHYKZPUMV\YRL`SPMLZH]PUN O\THUP[HYPHUZLJ[VYZ!>H[LYZ\WWS`ZHUP[H[PVUHUKO`NPLUL WYVTV[PVU"-VVKZLJ\YP[`HUKU\[YP[PVU":OLS[LYZL[[SLTLU[HUK UVUMVVKP[LTZ"/LHS[OHJ[PVU;OL`KLZJYPILwhat needs to be achieved in a humanitarian response in order for disaster- affected populations to survive and recover in stable conditions and with dignity. ;OL:WOLYL/HUKIVVRLUQV`ZIYVHKV^ULYZOPWI`HNLUJPLZHUK PUKP]PK\HSZVMMLYPUN[OLO\THUP[HYPHUZLJ[VYH common language for working together towards quality and accountability in disaster and conflict situations ;OL:WOLYL/HUKIVVROHZHU\TILYVMºJVTWHUPVU Z[HUKHYKZ»L_[LUKPUNP[ZZJVWLPUYLZWVUZL[VULLKZ[OH[ OH]LLTLYNLK^P[OPU[OLO\THUP[HYPHUZLJ[VY ;OL:WOLYL7YVQLJ[^HZPUP[PH[LKPU I`HU\TILY VMO\THUP[HYPHU5.6ZHUK[OL9LK*YVZZHUK 9LK*YLZJLU[4V]LTLU[ ,+0;065 7KHB6SKHUHB3URMHFWBFRYHUBHQBLQGG The Sphere Project Humanitarian Charter and Minimum Standards in Humanitarian Response Published by: The Sphere Project Copyright@The Sphere Project 2011 Email: [email protected] Website : www.sphereproject.org The Sphere Project was initiated in 1997 by a group of NGOs and the Red Cross and Red Crescent Movement to develop a set of universal minimum standards in core areas of humanitarian response: the Sphere Handbook. -

Equivelar Octahedron of Genus 3 in 3-Space
Equivelar octahedron of genus 3 in 3-space Ruslan Mizhaev ([email protected]) Apr. 2020 ABSTRACT . Building up a toroidal polyhedron of genus 3, consisting of 8 nine-sided faces, is given. From the point of view of topology, a polyhedron can be considered as an embedding of a cubic graph with 24 vertices and 36 edges in a surface of genus 3. This polyhedron is a contender for the maximal genus among octahedrons in 3-space. 1. Introduction This solution can be attributed to the problem of determining the maximal genus of polyhedra with the number of faces - . As is known, at least 7 faces are required for a polyhedron of genus = 1 . For cases ≥ 8 , there are currently few examples. If all faces of the toroidal polyhedron are – gons and all vertices are q-valence ( ≥ 3), such polyhedral are called either locally regular or simply equivelar [1]. The characteristics of polyhedra are abbreviated as , ; [1]. 2. Polyhedron {9, 3; 3} V1. The paper considers building up a polyhedron 9, 3; 3 in 3-space. The faces of a polyhedron are non- convex flat 9-gons without self-intersections. The polyhedron is symmetric when rotated through 1804 around the axis (Fig. 3). One of the features of this polyhedron is that any face has two pairs with which it borders two edges. The polyhedron also has a ratio of angles and faces - = − 1. To describe polyhedra with similar characteristics ( = − 1) we use the Euler formula − + = = 2 − 2, where is the Euler characteristic. Since = 3, the equality 3 = 2 holds true. -

Quick Reference Guide - Ansi Z80.1-2015
QUICK REFERENCE GUIDE - ANSI Z80.1-2015 1. Tolerance on Distance Refractive Power (Single Vision & Multifocal Lenses) Cylinder Cylinder Sphere Meridian Power Tolerance on Sphere Cylinder Meridian Power ≥ 0.00 D > - 2.00 D (minus cylinder convention) > -4.50 D (minus cylinder convention) ≤ -2.00 D ≤ -4.50 D From - 6.50 D to + 6.50 D ± 0.13 D ± 0.13 D ± 0.15 D ± 4% Stronger than ± 6.50 D ± 2% ± 0.13 D ± 0.15 D ± 4% 2. Tolerance on Distance Refractive Power (Progressive Addition Lenses) Cylinder Cylinder Sphere Meridian Power Tolerance on Sphere Cylinder Meridian Power ≥ 0.00 D > - 2.00 D (minus cylinder convention) > -3.50 D (minus cylinder convention) ≤ -2.00 D ≤ -3.50 D From -8.00 D to +8.00 D ± 0.16 D ± 0.16 D ± 0.18 D ± 5% Stronger than ±8.00 D ± 2% ± 0.16 D ± 0.18 D ± 5% 3. Tolerance on the direction of cylinder axis Nominal value of the ≥ 0.12 D > 0.25 D > 0.50 D > 0.75 D < 0.12 D > 1.50 D cylinder power (D) ≤ 0.25 D ≤ 0.50 D ≤ 0.75 D ≤ 1.50 D Tolerance of the axis Not Defined ° ° ° ° ° (degrees) ± 14 ± 7 ± 5 ± 3 ± 2 4. Tolerance on addition power for multifocal and progressive addition lenses Nominal value of addition power (D) ≤ 4.00 D > 4.00 D Nominal value of the tolerance on the addition power (D) ± 0.12 D ± 0.18 D 5. Tolerance on Prism Reference Point Location and Prismatic Power • The prismatic power measured at the prism reference point shall not exceed 0.33Δ or the prism reference point shall not be more than 1.0 mm away from its specified position in any direction. -

Using Non-Euclidean Geometry to Teach Euclidean Geometry to K–12 Teachers
Using non-Euclidean Geometry to teach Euclidean Geometry to K–12 teachers David Damcke Department of Mathematics, University of Portland, Portland, OR 97203 [email protected] Tevian Dray Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] Maria Fung Mathematics Department, Western Oregon University, Monmouth, OR 97361 [email protected] Dianne Hart Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] Lyn Riverstone Department of Mathematics, Oregon State University, Corvallis, OR 97331 [email protected] January 22, 2008 Abstract The Oregon Mathematics Leadership Institute (OMLI) is an NSF-funded partner- ship aimed at increasing mathematics achievement of students in partner K–12 schools through the creation of sustainable leadership capacity. OMLI’s 3-week summer in- stitute offers content and leadership courses for in-service teachers. We report here on one of the content courses, entitled Comparing Different Geometries, which en- hances teachers’ understanding of the (Euclidean) geometry in the K–12 curriculum by studying two non-Euclidean geometries: taxicab geometry and spherical geometry. By confronting teachers from mixed grade levels with unfamiliar material, while mod- eling protocol-based pedagogy intended to emphasize a cooperative, risk-free learning environment, teachers gain both content knowledge and insight into the teaching of mathematical thinking. Keywords: Cooperative groups, Euclidean geometry, K–12 teachers, Norms and protocols, Rich mathematical tasks, Spherical geometry, Taxicab geometry 1 1 Introduction The Oregon Mathematics Leadership Institute (OMLI) is a Mathematics/Science Partner- ship aimed at increasing mathematics achievement of K–12 students by providing professional development opportunities for in-service teachers. -

Squaring the Circle in Elliptic Geometry
Rose-Hulman Undergraduate Mathematics Journal Volume 18 Issue 2 Article 1 Squaring the Circle in Elliptic Geometry Noah Davis Aquinas College Kyle Jansens Aquinas College, [email protected] Follow this and additional works at: https://scholar.rose-hulman.edu/rhumj Recommended Citation Davis, Noah and Jansens, Kyle (2017) "Squaring the Circle in Elliptic Geometry," Rose-Hulman Undergraduate Mathematics Journal: Vol. 18 : Iss. 2 , Article 1. Available at: https://scholar.rose-hulman.edu/rhumj/vol18/iss2/1 Rose- Hulman Undergraduate Mathematics Journal squaring the circle in elliptic geometry Noah Davis a Kyle Jansensb Volume 18, No. 2, Fall 2017 Sponsored by Rose-Hulman Institute of Technology Department of Mathematics Terre Haute, IN 47803 a [email protected] Aquinas College b scholar.rose-hulman.edu/rhumj Aquinas College Rose-Hulman Undergraduate Mathematics Journal Volume 18, No. 2, Fall 2017 squaring the circle in elliptic geometry Noah Davis Kyle Jansens Abstract. Constructing a regular quadrilateral (square) and circle of equal area was proved impossible in Euclidean geometry in 1882. Hyperbolic geometry, however, allows this construction. In this article, we complete the story, providing and proving a construction for squaring the circle in elliptic geometry. We also find the same additional requirements as the hyperbolic case: only certain angle sizes work for the squares and only certain radius sizes work for the circles; and the square and circle constructions do not rely on each other. Acknowledgements: We thank the Mohler-Thompson Program for supporting our work in summer 2014. Page 2 RHIT Undergrad. Math. J., Vol. 18, No. 2 1 Introduction In the Rose-Hulman Undergraduate Math Journal, 15 1 2014, Noah Davis demonstrated the construction of a hyperbolic circle and hyperbolic square in the Poincar´edisk [1]. -
Elliptic Geometry Hawraa Abbas Almurieb Spherical Geometry Axioms of Incidence
Elliptic Geometry Hawraa Abbas Almurieb Spherical Geometry Axioms of Incidence • Ax1. For every pair of antipodal point P and P’ and for every pair of antipodal point Q and Q’ such that P≠Q and P’≠Q’, there exists a unique circle incident with both pairs of points. • Ax2. For every great circle c, there exist at least two distinct pairs of antipodal points incident with c. • Ax3. There exist three distinct pairs of antipodal points with the property that no great circle is incident with all three of them. Betweenness Axioms Betweenness fails on circles What is the relation among points? • (A,B/C,D)= points A and B separates C and D 2. Axioms of Separation • Ax4. If (A,B/C,D), then points A, B, C, and D are collinear and distinct. In other words, non-collinear points cannot separate one another. • Ax5. If (A,B/C,D), then (B,A/C,D) and (C,D/A,B) • Ax6. If (A,B/C,D), then not (A,C/B,D) • Ax7. If points A, B, C, and D are collinear and distinct then (A,B/C,D) , (A,C/B,D) or (A,D/B,C). • Ax8. If points A, B, and C are collinear and distinct then there exists a point D such that(A,B/C,D) • Ax9. For any five distinct collinear points, A, B, C, D, and E, if (A,B/E,D), then either (A,B/C,D) or (A,B/C,E) Definition • Let l and m be any two lines and let O be a point not on either of them. -

And Are Lines on Sphere B That Contain Point Q
11-5 Spherical Geometry Name each of the following on sphere B. 3. a triangle SOLUTION: are examples of triangles on sphere B. 1. two lines containing point Q SOLUTION: and are lines on sphere B that contain point Q. ANSWER: 4. two segments on the same great circle SOLUTION: are segments on the same great circle. ANSWER: and 2. a segment containing point L SOLUTION: is a segment on sphere B that contains point L. ANSWER: SPORTS Determine whether figure X on each of the spheres shown is a line in spherical geometry. 5. Refer to the image on Page 829. SOLUTION: Notice that figure X does not go through the pole of ANSWER: the sphere. Therefore, figure X is not a great circle and so not a line in spherical geometry. ANSWER: no eSolutions Manual - Powered by Cognero Page 1 11-5 Spherical Geometry 6. Refer to the image on Page 829. 8. Perpendicular lines intersect at one point. SOLUTION: SOLUTION: Notice that the figure X passes through the center of Perpendicular great circles intersect at two points. the ball and is a great circle, so it is a line in spherical geometry. ANSWER: yes ANSWER: PERSEVERANC Determine whether the Perpendicular great circles intersect at two points. following postulate or property of plane Euclidean geometry has a corresponding Name two lines containing point M, a segment statement in spherical geometry. If so, write the containing point S, and a triangle in each of the corresponding statement. If not, explain your following spheres. reasoning. 7. The points on any line or line segment can be put into one-to-one correspondence with real numbers. -
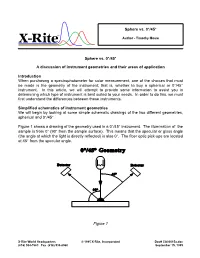
Sphere Vs. 0°/45° a Discussion of Instrument Geometries And
Sphere vs. 0°/45° ® Author - Timothy Mouw Sphere vs. 0°/45° A discussion of instrument geometries and their areas of application Introduction When purchasing a spectrophotometer for color measurement, one of the choices that must be made is the geometry of the instrument; that is, whether to buy a spherical or 0°/45° instrument. In this article, we will attempt to provide some information to assist you in determining which type of instrument is best suited to your needs. In order to do this, we must first understand the differences between these instruments. Simplified schematics of instrument geometries We will begin by looking at some simple schematic drawings of the two different geometries, spherical and 0°/45°. Figure 1 shows a drawing of the geometry used in a 0°/45° instrument. The illumination of the sample is from 0° (90° from the sample surface). This means that the specular or gloss angle (the angle at which the light is directly reflected) is also 0°. The fiber optic pick-ups are located at 45° from the specular angle. Figure 1 X-Rite World Headquarters © 1995 X-Rite, Incorporated Doc# CA00015a.doc (616) 534-7663 Fax (616) 534-8960 September 15, 1995 Figure 2 shows a drawing of the geometry used in an 8° diffuse sphere instrument. The sphere wall is lined with a highly reflective white substance and the light source is located on the rear of the sphere wall. A baffle prevents the light source from directly illuminating the sample, thus providing diffuse illumination. The sample is viewed at 8° from perpendicular which means that the specular or gloss angle is also 8° from perpendicular. -

+ 2R - P = I + 2R - P + 2, Where P, I, P Are the Invariants P and Those of Zeuthen-Segre for F
232 THE FOURTH DIMENSION. [Feb., N - 4p - (m - 2) + 2r - p = I + 2r - p + 2, where p, I, p are the invariants p and those of Zeuthen-Segre for F. If I is the same invariant for F, since I — p = I — p, we have I = 2V — 4p — m = 2s — 4p — m. Hence 2s is equal to the "equivalence" in nodes of the point (a, b, c) in the evaluation of the invariant I for F by means of the pencil Cy. This property can be shown directly for the following cases: 1°. F has only ordinary nodes. 2°. In the vicinity of any of these nodes there lie other nodes, or ordinary infinitesimal multiple curves. In these cases it is easy to show that in the vicinity of the nodes all the numbers such as h are equal to 2. It would be interesting to know if such is always the case, but the preceding investigation shows that for the applications this does not matter. UNIVERSITY OF KANSAS, October 17, 1914. THE FOURTH DIMENSION. Geometry of Four Dimensions. By HENRY PARKER MANNING, Ph.D. New York, The Macmillan Company, 1914. 8vo. 348 pp. EVERY professional mathematician must hold himself at all times in readiness to answer certain standard questions of perennial interest to the layman. "What is, or what are quaternions ?" "What are least squares?" but especially, "Well, have you discovered the fourth dimension yet?" This last query is the most difficult of the three, suggesting forcibly the sophists' riddle "Have you ceased beating your mother?" The fact is that there is no common locus standi for questioner and questioned.