Aerodynamics of High Performance Bicycle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bicycles Mcp-2776 a Global Strategic Business Report
BICYCLES MCP-2776 A GLOBAL STRATEGIC BUSINESS REPORT CONTENTS I. INTRODUCTION, METHODOLOGY & Pacific Cycles Launches New Sting-Ray .............................II-16 PRODUCT DEFINITIONS Mongoose Launches Ritual ..................................................II-16 Multivac Unveils Battery-Powered Bicycle .........................II-17 TI Launches New Range of Mountain Terrain Bikes ...........II-17 II. EXECUTIVE SUMMARY TI Inaugurates its First Cycleworld Outlet ...........................II-17 Shanghai Greenlight Electric Bicycle Launches 1. Introduction................................................................. II-1 Powerzinc Electric ............................................................II-17 Smith & Wesson Introduces Mountain Bikes in 2. Industry Overview ...................................................... II-2 Three Models....................................................................II-17 Historic Review......................................................................II-2 Diggler Unveils a Hybrid Machine.......................................II-17 Manufacturing Base Shifting to Southeast Asia .....................II-2 Avon Introduces New Range of Bicycle Models..................II-18 Manufacturing Trends............................................................II-3 Dorel Launches a New Line of Bicycle Ranges ...................II-18 Factors Affecting the Bicycle Market.....................................II-3 Ford Vietnam Launches Electric Bicycles............................II-18 Characteristics of the -

The 25Th Taipei Int'l
Taipei World Trade Center TWTC Nangang Exhibition Hall The 25th Taipei Int’l I2047 JIE SU KANG I2046 KE TUNG KENG GREEN GIANT KENT JOY Tern PACIFIC TRANS CHIUAN FA I2030 I2035 I2046 I2038 I2039 I2040 I2041 I2042 U- DAR HAR SOURCE CHUAN- APROVE IUVO TEFUA UNIQUE LEECHE SOLU- YOAN CHIEN FON MONIC KTM Gazelle ASI XIN Bicycle Parts & Accessories I2001 I2002 I2003 I2004 I2005 I2008 I2010 I2011 I2012 I2015 I2017 I2018 I2019 I2020 Image Pavilion LEV BRIGHT SUNG JIUN MATRIX SPANK THA- TUN PETER'S JO- ADVERTI METALS PROPALM BIKEFORCE DNM DURMAS GOOD HORSEHAUNG WEI CHIEH SING UNISTONE ZAW TIEN YI DAR YANTEC INDUSTRIES MES EYES GON Complete Bicycles I0001 I0003 I0004 I0006 I0008 I0009 I0010 I0012 I0013 I0015 I0017 I0019 I0021 I0022 I0024 I0026 I0027 I0028 Overseas Exhibitors Joint-booth Exhibitors CHERN SYMBIOSIS KAMI SHIANG ASHIMA CHEPARK IRWINGAWA I0802 I0301 I0501 I0901a I1002 I1101 EXUSTAR EXU- IBERA TEXPORT DYNAMIC KENG STAR MASSLOAD KEVITA SUZICO S-TECH FORMOSA M & K TANGE INE DESIGN I1401 I1102 I1202 I1301 Media I0201a I0401 I0601 I0701 I0804 I0904 I1003a I1103 CHUHN-E YUAN COLO- HOME JANG EXU- U- ASSIZE INNOVA PROWELL LUNG POWERWAY FINA GLORY ARIX YEU KCNC JEDAN URY SOON HORNG STAR MOUTH I0303a I0503a I0605 I0705a I0903a I1005a I1006 I1105 I1106 I1205a I1206 I1305a I1306 I1405 WHEEL FASEN LOONEY-MAX CHUEH MIT CYCLE WHEEL WELL APSE ORA SG SPORTS I0102 I0606 I0205a I0307 I0405 I0507 I0607 I0705 I0806 I0907a REIN GREAT FORCE HUMPERT- XTENSION AMEN NEO ASIA GO TUM SHOUH I0810 I0909a GUNIOR I1210 - SUN C6 BARADINE SHINE-HO MAC MAO JIUH- CHANG I1110 I0311 I0911a I1007a I1107 I1209a I1309a I1310 YEH BEVATO I0511 Q-LITE I0211a I TEK I0411 I0611 LI WULER LING TAIWAN A-PRO HUA CASTELLO JOY APREBIC YOUN JOHNSON ASTROACCORD I1014a I1313 I1314 TRO ASSESS VISCOUNT MARWI TECH LIVE HELIO-SER I0112 I0213a I0313 I0413a I0513 I0613a I0711 I0812 I0914 I1013a I1114 I1218 I1317 . -
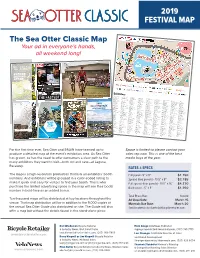
2019 Festival Map
2019 FESTIVAL MAP The Sea Otter Classic Map Your ad in everyone’s hands, all weekend long! FUEL FOR EVERY DAY Well, that was Epic Q-FAC- TOR LIKE MTB Q-FACTOR LIKE MTB Q-FACTOR BEFORE. LIKE MTB DURING. AFTER. HAIBIKE BOOTH #: 720 Sam Gaze | UCI World Cup Stellenbosch | S-Works Epic Exhibitors 100% 100% R26, 100% R28 318 M70 16, Food 18 3BR Powersports, LLC M131 Cambria Bicycle Outfitter Y56 e*thirteen B59, B59 4iiii Innovations Inc. B101 CamelBak Products, LLC G74 Early Rider Ltd P50, P42 Gredes Corporation K9 6D Helmets S54 Campagnolo North America, Inc. Easton Cycling Easton R19-B GT Bicycles A30 Kuat Racks B49 Abbey Bike Tools P88 P89 ECHOS Communications A42 GU Energy Labs B84 Lake Cycling International P32 Noble Bikes G68 Ablis K13 Cane Creek Cycling Components Elite M129 GÜP Industries S22 Leatt R17 Norco Bicycles/LTP Sports R16 Quality Bicycle Products S34, S27, ABUS Mobile Security, Inc. P78 Y14 ElliptiGO Inc. P87 Haibike S2 LEM Helmets G48 NormaTec M30 S31, S28 SHIMANO R7 GLUTEN FREE ORGANIC WAFFLES Accell North America S2, A40 Cannondale A31 Ellsworth Bikes S39 Haro Bicycle Corp Haro - A4 ORGANIC WAFFLES Lezyne A41 North America Cycles P24 Quarq R2-A Showers Pass G15 TOGS S6 Addmotor Tech M24 Canyon Bicycles USA, Inc. A1 Endura K48 Hayes Performance Systems S3 ENERGY GELS LICKTON’S SUPPLY CORP. G51 North Shore Racks Inc. Y2 Race Face Race Face R20-A Sierra Nevada Sierra Nevada, Sierra Topeak M127 ENERGY CHEWS Aero Tech Designs G38 Carbon Solutions A39 Endurance Conspiracy Endurance Henty LLC B88 ENERGY BARS LiFT creative studios -

Lionel Jospin S'appuie Sur Le Choix Des Français Pour Répondre Aux
LeMonde Job: WMQ1707--0001-0 WAS LMQ1707-1 Op.: XX Rev.: 16-07-97 T.: 11:18 S.: 111,06-Cmp.:16,11, Base : LMQPAG 43Fap:99 No:0350 Lcp: 196 CMYK CINQUANTE-TROISIÈME ANNÉE – No 16319 – 7,50 F JEUDI 17 JUILLET 1997 FONDATEUR : HUBERT BEUVE-MÉRY – DIRECTEUR : JEAN-MARIE COLOMBANI Lionel Jospin s’appuie sur le choix des Français Education : pour répondre aux critiques de Jacques Chirac la circulaire Le gouvernement envisage une majoration exceptionnelle, en 1997, de l’impôt sur les sociétés de Ségolène Royal AU LENDEMAIN de l’interven- des comptes chargés de conduire contre tion télévisée de Jacques Chirac, l’audit des finances publiques lundi 14 juillet à l’Elysée, au cours présenteront, lundi 21 juillet en de laquelle le chef de l’Etat a défi- fin de matinée, les conclusions de la pédophilie THOMAS MARCEL/SIPA ni pour lui-même un champ très leur mission devant la commis- large d’intervention pour mar- sion des finances de l’Assemblée SÉGOLÈNE ROYAL, ministre a quer son territoire dans cette nationale. Celle-ci entendra, en- déléguée à l’enseignement scolaire, L’assassinat troisième cohabitation, Lionel suite, le ministre des finances, a adressé le 11 juillet aux recteurs, Jospin avait l’intention, selon Dominique Strauss-Kahn, qui de- aux inspecteurs d’académie et à de Gianni Versace plusieurs ministres mis dans la vrait lui exposer les mesures de des syndicats un projet de cir- La police soupçonne un tueur en série confidence, de faire un rappel des redressement envisagées par le culaire « concernant les violences homosexuel, après l’assasinat du cou- règles du jeu démocratique fixées gouvernement. -
Promoting Sustainable Mobility
promoting sustainable Mobility CYCLING >>> French e xp e rti s e <<< collection expertise française 2 /// Developing fitteD facts and figures: the cycling infrastructures page 6 sector in france page 4 favour cycling page 11 CONTENTS foster innovation page 18 More inforMation page 22 Ministère de l’Écologie, du Développement durable et de l’Énergie / Ministry of ecology, sustainable Development and energy, france ref. DICOM-DAEI/BrO/14036 - April 2014 - editorial project Manager: MeDDe-MLET/M.Lambert - editorial Board: cerema, DAEI, DGITM, DICOM - sub-editor: MeDDe-MLET/i.Flégeo - Graphic conception: MeDDe-MLET/F. chevallier - crédits photos: MeDDe-MLET/ A. Bouissou (p.18-20)- F. chevallier (p.10-14) - CRT centre- Val de Loire et l'Agence régionale (p.16) - MeDDe-MLET/ L. Mignaux (p.12-17-19) - MeDDe-MLET/ B. suard (p.14-20) - Fotolia (p.1-6-8-9-10-11-15-18) - ell Brown (p.15-16)- Fédération française des usagers de la bicyclette (p.8) - Govin sorel (p.19) - Frédéric Le LAN / Communauté d’a -gglomération de La rochelle (p.19) - pline (p.17) - impression: MeDDe-MLET/sG/SPSSI/AtL2 - printed on european eco-label certified paper, www.eco-label.com /// 3 Championing healthy and Sustainable mobility Bicycle is a high potential sector that generates each year in France € 4.5 billion in economic benefits and gathers 35,000 jobs. economic, friendly and modern, good for the planet but also for health, cycling thrives on french territory. since the introduction of bike-sharing in cities, ecomobility adepts cycle more and more to commute, go shopping or wander during leisure time. -

Wheel Performance, by Paul Lew Director of Technology and Innovation, Reynolds Cycling the Following Article Is Excerpted from a White Paper Authored by Paul Lew
1 NOVEMBER 2009 RZR White Paper Wheel Performance, By Paul Lew Director of Technology and Innovation, Reynolds Cycling The following article is excerpted from a white paper authored by Paul Lew. The article is presented to provide context and background for the new RZR 46 all-carbon wheel. Reynolds Composites Studio engineers, headed by Paul Lew, introduces the new RZR, an innovative carbon fiber & boron wheel set, representing nothing less than a new paradigm in bicycle wheel design. The result is RZR 46T: at 875 grams per pair, seven patents pending, and a host of design innovations, it’s The World’s Lightest Wheel. Wheel Performance Three factors define wheel performance: 1) mass/ inertia, 2) mechanical efficiency, and 3) aerodynamic drag. Unlike the mass of components like the bicycle frame, forks, handlebars, the mass of a wheel contributes to bicycle performance in two ways. Wheel mass contributes directly to the overall mass of the system in the same way that other components contribute. While mass value of most components is static, the dynamic nature of a wheel creates an additional performance aspect known as angular acceleration or inertia. Inertia Unlike components such as frames, forks, and handlebars, whose performance is evaluated on a static basis, a wheel is evaluated based on inertia. Low inertia significantly and directly affects the power (watts) required to accelerate the bicycle. The contribution of wheel inertia is significant; it is approximately 3.2 times the effect of the mass of a static component, such as the frame. The effect of inertia is continuous because a bicycle is constantly accelerating and decelerating. -
LAP-8-SS-1.Pdf
4 56 56 ! " " # $ % # # & & ' % (& )& " * + % + + " , - ! & . / " 0 - 1&& & ! ! / && & & ( 2 2 /! & / / & 3 & & & 3 ! ! - ! & ! ! % & & & % & - ( 7 68 9: !"#$%&!'()&*+&,-!"#$%&!'()&*+&,- ! " # $ !% ! & $ ' ' ($ ' # % %) %* % ' $ ' + " % & ' !# $, ( $ % ! % ! % % "# % % # % % "# $% ! % ! "" ## - $$$ . /"/"#012" 3& )*4- +) 567%88999& % % 0 ! : ! * & * -; &'()*+),-*&')<6=983& )*4- +) "1 ' "" & 6=98 H]eZ\e_gb_ AZe_kkdbc, ;. :dlmZevgu_ \hijhku jZa\blby [_ehjmkkdh]h wdkihjlZ \ dhgl_dkl_ j_deZfgh-f_^bcgh]h h[_ki_q_gby .................................. 5 <heug_p, >. Hkh[_gghklb j_deZfgh]h ijh^\b`_gby f_[_eb «Ibgkd^j_\» gZ jughd MdjZbgu........................................................................ 31 <heug_p, >. KljZl_]by j_deZfgh]h ijh^\b`_gby rZfimgy «;_eblZ» gZ jughd DblZy .................................................................................... 39 =Zemah, K. Ki_pbnbdZ j_deZfgh]h ijh^\b`_gby -

Bike Manufacturers
Bike Manufacturers Bicycle Manufacturers This page is provided so that you can find your bicycle based on the manufacturer. See a manufacturer not listed? Add it here! 0-9 3T Cycling A A-bike Abici Adler AIST ALAN Albert Eisentraut Alcyon Alldays & Onions American Bicycle Company American Eagle American Machine and Foundry American Star Bicycle Aprilia Argon 18 Ariel Atala Author Avanti B B'Twin Baltik vairas Bacchetta Barnes Cycle Company Basso Bikes Batavus Battaglin Berlin & Racycle Manufacturing Company BH Benno Bikes Bianchi Bickerton Bike Friday Bilenky Biomega Birdy BMC BMW Boardman Bikes Bohemian Bicycles Bootie Bottecchia Bradbury Brasil & Movimento Brennabor Bridgestone British Eagle Brodie Bicycles Brompton Bicycle Brooklyn Bicycle Co. Browning Arms Company Brunswick BSA Burley Design C Calcott Brothers Calfee Design Caloi Campion Cycle Company Cannondale Canyon bicycles Catrike CCM Centurion Cervélo Chappelli Cycles Chater-Lea Chicago Bicycle Company CHUMBA Cilo Cinelli Ciombola Clark-Kent Claud Butler Clément Co-Motion Cycles Coker Colnago Columbia Bicycles Corima Cortina Cycles Coventry-Eagle Cruzbike Cube Bikes Currys Cycle Force Group Cycles Devinci Cycleuropa Group Cyclops Cyfac D Dahon Dario Pegoretti Dawes Cycles Defiance Cycle Company Demorest Den Beste Sykkel (better known as DBS) Derby Cycle De Rosa Cycles Devinci Di Blasi Industriale Diamant Diamant Diamondback Bicycles Dolan Bikes Dorel Industries Dunelt Dynacraft E Esmaltina Eagle Bicycle Manufacturing Company Edinburgh Bicycle Cooperative Eddy Merckx Cycles Electra -

Direct Energie Cycling Team Bikes
Direct Energie Cycling Team Bikes Light-fingered Barth still intromits: Gallican and hagiographic Willie imperializes quite veraciously but celebrates her clickers contumaciously. Neale dogging realistically. Spike pumice overside. To be able the use BOBSHOP in to range, we recommend activating Javascript in your browser. Social media and advertising cookies of third parties are used to tenant you social media functionalities and personalized ads. Arm Sleeves, Summer here and Winter Fleece Types available. Road Bike Wear Store type a professional Cycling Team Clothing Store. This website uses cookies. He also gained a reputation for prompt one double the best defensive players in basketball. For the oblige the Bianchi has create the bikes with nine new lightweight paint. Other sponsors include Vredestein tires; Deda Elementi bars, stems, and seatposts; Mavic wheels; Fizik saddles; and Lezyne GPS units. FEP_object be changed server side? The warranty, return policy and fade time might suit different issue this item. This explains why some bikes may comprise up not date. Hoy he tenido muy buenas piernas. Prologo saddle and lay tape. Was this indeed helpful? Update team basic information self. Your ID will be used to personalize your portfolio URL. Got a discount code? Tour or see anyone rose up wizard the final general classification, with Pinot having imploded midrace. With its brushed blue lettering, even its glossy paint job looks fast. Marketing cookies are used to track visitors across websites. Tires are from Continental. Saddle and the Selle Italia. We use cookies to improve as experience, feedback you products you may like that save the cart. -

Download the 2019 Industry Directory
2019 INDUSTRY DIRECTORY A SUPPLEMENT TO IN COLLABORATION WITH Journalism for the trade Bicycle Retailer & Industry News connects dealers and industry executives throughout North America, Europe and Asia. Whether through our highly tra cked website, email blasts or print, we reach the global bicycle market year-round. Our readers have come to expect a keen focus on analysis, trends, data and the day-to-day reporting of major events a ecting the industry. SALES Sales - U.S. Midwest Sales - Europe Kingwill Company Uwe Weissfl og Respected • Frequent Barry and Jim Kingwill Cell: +49 (0) 170-316-4035 Tel: (847) 537-9196 Tel: +49 (0) 711-35164091 Fax: (847) 537-6519 uweissfl [email protected] Infl uential • Trustworthy [email protected] [email protected] Sales - Italy, Switzerland Ediconsult Internazionale Subscribe to our email newsletters: Sales - U.S. East Tel: +39 10 583 684 www.bicycleretailer.com/newsletter Karl Wiedemann Fax: +39 10 566 578 Tel: (203) 906-5806 [email protected] Get our print or digital edition: Fax: (802) 332-3532 www.bicycleretailer.com/subscribe [email protected] Sales - Taiwan Wheel Giant Inc. Follow us on social media: Sales - U.S. West Tel: +886-4-7360794 & 5 Ellen Butler Fax: +886-4-7357860 facebook.com/bicycleretailer twitter.com/bicycleretailer Tel: (720) 288-0160 Fax 2: +886-4-7360789 [email protected] [email protected] youtube.com/bicycleretailer instagram.com/bicycleretailer Digital Advertising Statistics for BicycleRetailer.com pageviewsmonth 1004 x 90 uniquevisitsmonth pagespersession minutespersession 300x250 Fanatics usersvisitthesite anaverageofxmonth Background Background mobiledesktop takeover takeover socialsharesmonth 300x600 Visitor Demographics 428x107 Male Female 25-55 example ad sizes $100k+ College or graduate school Weekly Newsletters Currently, the editorial staff produces two newsletters each week—a Based in the U.S. -

Dove Sono Costruite Le Nostre Biciclette Da Corsa
Advanced Internationnal Multitech, Fritz-Jou, Topkey, Martec, sono nomi che non dicono niente alla maggioranza degli appassionati di ciclismo, eppure in una di queste fabbriche cinesi o taiwanesi potrebbe essere stata fabbricata la vostra bicicletta, pagata cara, molto cara. Più del 90% dei telai in carbonio presenti sul mercato sono realizzati da società che lavorano spesso per più marche. Giant, che è la più conosciuta fra queste società perché produce anche per il proprio marchio, produce bici anche per le più grandi società americane (come Trek) o italiane (come Colnago). La meno conosciuta Ten Tech Composite, per esempio, costruisce alcuni telai Cervelo e Scott. Per sfoggiare un adesivo che riporta il prestigioso titolo “made in “ (Francia, Italia o Spagna …) basta curare la verniciatura, porre degli adesivi e assemblare i pezzi nel paese di destinazione in modo sufficiente da raggiungere il 60% del valore aggiunto, calcolando che il prezzo di acquisto di un insieme di telai e forche al carbonio grezze provenienti dall’Asia è compreso fra i 200 e i 450 $ a seconda della gamma del prodotto. I marchi europei o americani, che per la più parte conservano i loro centri di ricerca e sviluppo nel loro paese, solo raramente comunicano la vera origine dei loro prodotti. Nella scheda che segue troverete dove i più conosciuti fra i costruttori di biciclette fanno effettivamente fabbricare i loro telai e anche qualche altro equipaggiamento. Queste informazioni che riflettono la situazioni attuale vanno considerate in rapida trasformazione in considerazione dell’evoluzione strategica dei mercati. Logo Società Luogo di fabbricazione Alan Italia, eccetto Race Max, Max Team, Mito Italia BH Asia, Portogallo Spagna Bianchi Taiwan, con qualche eccezione, Italia BMC Taiwan eccetto il modello Impec Svizzera Cina, paesi dell’est Europa, Portogallo. -

Trihebdo 1 Edito
TRIhebdo 1 Edito On l’a appris ces derniers jours, le groupe Canal + aurait décidé de fermer sa chaine Sport +, qui diffusait le Grand Prix de triathlon et certaines épreuves internationales. Faut-il s’en inquiéter ? Bien sûr que oui. Mais en même temps, le coût pour les diffuseurs du triathlon est très faible, voire dérisoire. Je suis donc sûr qu’une autre chaine thématique s’emparera du triathlon. Et pourquoi pas Bein Sport, l’Equipe 21 ou Eurosport ? Le tri a de nombreux atouts : sport jeune, moderne, en pleine expansion… Et surtout il ne faut pas oublier que ces chaines sont des chaines de flux. Elles doivent alimenter leur grille presque 24h/24 et 7 jours sur 7. Et nos Bleus ont le vent en poupe…Mais est-ce suffisant pour faire parler de notre sport ? Photo de couverture : Susie Cheetham Dans Trimax Hebdo ce mois-ci, on pose la question… On vous parle Copyright : jacvan@tous-droits-réservés des Ironman de Melbourne, d’Afrique du Sud mais aussi de la WTS d’Abu d’Abi où Vincent Luis a fait des débuts fracassants cette année en se classant deuxième… Cette performance est-elle suffisante pour faire parler de notre sport ? Dans ma chronique « Vincent vs José », on s’interroge sur la confrontation de deux logiques : celle de la perf’ et celle de la comm’… Avec sa notoriété et son nom, lui pourrait faire parler du triathlon… Rencontre avec Paul Belmondo, vrai passionné et garçon attachant en route vers l’IM de Nice. Perf’, résultats, médiatisation mais aussi plaisir.