Performance Analysis of Intel Gen9.5 Integrated GPU Architecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Release Notes for X11R6.8.2 the X.Orgfoundation the Xfree86 Project, Inc
Release Notes for X11R6.8.2 The X.OrgFoundation The XFree86 Project, Inc. 9February 2005 Abstract These release notes contains information about features and their status in the X.Org Foundation X11R6.8.2 release. It is based on the XFree86 4.4RC2 RELNOTES docu- ment published by The XFree86™ Project, Inc. Thereare significant updates and dif- ferences in the X.Orgrelease as noted below. 1. Introduction to the X11R6.8.2 Release The release numbering is based on the original MIT X numbering system. X11refers to the ver- sion of the network protocol that the X Window system is based on: Version 11was first released in 1988 and has been stable for 15 years, with only upwardcompatible additions to the coreX protocol, a recordofstability envied in computing. Formal releases of X started with X version 9 from MIT;the first commercial X products werebased on X version 10. The MIT X Consortium and its successors, the X Consortium, the Open Group X Project Team, and the X.OrgGroup released versions X11R3 through X11R6.6, beforethe founding of the X.OrgFoundation. Therewill be futuremaintenance releases in the X11R6.8.x series. However,efforts arewell underway to split the X distribution into its modular components to allow for easier maintenance and independent updates. We expect a transitional period while both X11R6.8 releases arebeing fielded and the modular release completed and deployed while both will be available as different consumers of X technology have different constraints on deployment. Wehave not yet decided how the modular X releases will be numbered. We encourage you to submit bug fixes and enhancements to bugzilla.freedesktop.orgusing the xorgproduct, and discussions on this server take place on <[email protected]>. -

Mac Labs. More Creativity
Mac labs. More creativity. More engagement. More learning. Every Mac comes ready for 21st-century learning. Mac OS X Server creates the ultimate lab environment. Creativity and innovation are critical skills in the modern Mac OS X Server includes simplified tools for creating wikis and workplace, which makes them critical skills to teach today’s blogs, so students and staff can set up and manage them with students. Apple offers comprehensive lab solutions for your little or no help from IT. The Spotlight Server feature makes it school or university that will creatively engage students and easy for students collaborating on projects to find and view motivate them to take an interest in their own learning. The content stored anywhere on the network. Of course, access iLife ’09 suite of applications comes standard on every Mac, controls are built in, so they only get the search results they’re so students can immediately begin creating podcasts, editing authorised to see. Mac OS X Server also allows for real-time videos, composing music, producing photo essays and more. streaming of audio and video content, which lets everyone get right to work instead of waiting for downloads – saving major Mac or PC? Have both. storage across your network. Now one lab really can solve all your computing needs. Every Mac is powered by an Intel processor and features Launch careers from your Mac lab. Mac OS X – the world’s most advanced operating system. As an Apple Authorised Training Centre for Education, your Mac OS X comes with an amazing dual-boot feature called school can build a bridge between students and real-world Boot Camp that lets students run Windows XP or Vista natively careers. -
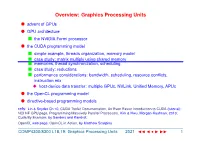
Overview: Graphics Processing Units
Overview: Graphics Processing Units l advent of GPUs l GPU architecture n the NVIDIA Fermi processor l the CUDA programming model n simple example, threads organization, memory model n case study: matrix multiply using shared memory n memories, thread synchronization, scheduling n case study: reductions n performance considerations: bandwidth, scheduling, resource conflicts, instruction mix u host-device data transfer: multiple GPUs, NVLink, Unified Memory, APUs l the OpenCL programming model l directive-based programming models refs: Lin & Snyder Ch 10, CUDA Toolkit Documentation, An Even Easier Introduction to CUDA (tutorial); NCI NF GPU page, Programming Massively Parallel Processors, Kirk & Hwu, Morgan-Kaufman, 2010; Cuda By Example, by Sanders and Kandrot; OpenCL web page, OpenCL in Action, by Matthew Scarpino COMP4300/8300 L18,19: Graphics Processing Units 2021 JJJ • III × 1 Advent of General-purpose Graphics Processing Units l many applications have massive amounts of mostly independent calculations n e.g. ray tracing, image rendering, matrix computations, molecular simulations, HDTV n can be largely expressed in terms of SIMD operations u implementable with minimal control logic & caches, simple instruction sets l design point: maximize number of ALUs & FPUs and memory bandwidth to take advantage of Moore’s’ Law (shown here) n put this on a co-processor (GPU); have a normal CPU to co-ordinate, run the operating system, launch applications, etc l architecture/infrastructure development requires a massive economic base for its development (the gaming industry!) n pre 2006: only specialized graphics operations (integer & float data) n 2006: ‘General Purpose’ (GPGPU): general computations but only through a graphics library (e.g. -
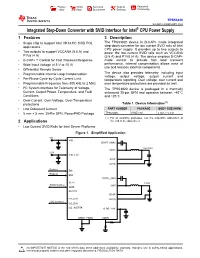
Integrated Step-Down Converter with SVID Interface for Intel® CPU
Product Order Technical Tools & Support & Folder Now Documents Software Community TPS53820 SLUSE33 –FEBRUARY 2020 Integrated Step-Down Converter with SVID Interface for Intel® CPU Power Supply 1 Features 3 Description The TPS53820 device is D-CAP+ mode integrated 1• Single chip to support Intel VR13.HC SVID POL applications step-down converter for low current SVID rails of Intel CPU power supply. It provides up to two outputs to • Two outputs to support VCCANA (5.5 A) and power the low current SVID rails such as VCCANA P1V8 (4 A) (5.5 A) and P1V8 (4 A). The device employs D-CAP+ • D-CAP+™ Control for Fast Transient Response mode control to provide fast load transient • Wide Input Voltage (4.5 V to 15 V) performance. Internal compensation allows ease of use and reduces external components. • Differential Remote Sense • Programmable Internal Loop Compensation The device also provides telemetry, including input voltage, output voltage, output current and • Per-Phase Cycle-by-Cycle Current Limit temperature reporting. Over voltage, over current and • Programmable Frequency from 800 kHz to 2 MHz over temperature protections are provided as well. 2 • I C System Interface for Telemetry of Voltage, The TPS53820 device is packaged in a thermally Current, Output Power, Temperature, and Fault enhanced 35-pin QFN and operates between –40°C Conditions and 125°C. • Over-Current, Over-Voltage, Over-Temperature (1) protections Table 1. Device Information • Low Quiescent Current PART NUMBER PACKAGE BODY SIZE (NOM) • 5 mm × 5 mm, 35-Pin QFN, PowerPAD Package TPS53820 RWZ (35) 5 mm × 5 mm (1) For all available packages, see the orderable addendum at 2 Applications the end of the data sheet. -

Introduction to Intel® FPGA IP Cores
Introduction to Intel® FPGA IP Cores Updated for Intel® Quartus® Prime Design Suite: 20.3 Subscribe UG-01056 | 2020.11.09 Send Feedback Latest document on the web: PDF | HTML Contents Contents 1. Introduction to Intel® FPGA IP Cores..............................................................................3 1.1. IP Catalog and Parameter Editor.............................................................................. 4 1.1.1. The Parameter Editor................................................................................. 5 1.2. Installing and Licensing Intel FPGA IP Cores.............................................................. 5 1.2.1. Intel FPGA IP Evaluation Mode.....................................................................6 1.2.2. Checking the IP License Status.................................................................... 8 1.2.3. Intel FPGA IP Versioning............................................................................. 9 1.2.4. Adding IP to IP Catalog...............................................................................9 1.3. Best Practices for Intel FPGA IP..............................................................................10 1.4. IP General Settings.............................................................................................. 11 1.5. Generating IP Cores (Intel Quartus Prime Pro Edition)...............................................12 1.5.1. IP Core Generation Output (Intel Quartus Prime Pro Edition)..........................13 1.5.2. Scripting IP Core Generation.................................................................... -
Introducing the New 11Th Gen Intel® Core™ Desktop Processors
Product Brief 11th Gen Intel® Core™ Desktop Processors Introducing the New 11th Gen Intel® Core™ Desktop Processors The 11th Gen Intel® Core™ desktop processor family puts you in control of your compute experience. It features an innovative new architecture for reimag- ined performance, immersive display and graphics for incredible visuals, and a range of options and technologies for enhanced tuning. When these advances come together, you have everything you need for fast-paced professional work, elite gaming, inspired creativity, and extreme tuning. The 11th Gen Intel® Core™ desktop processor family gives you the power to perform, compete, excel, and power your greatest contributions. Product Brief 11th Gen Intel® Core™ Desktop Processors PERFORMANCE Reimagined Performance 11th Gen Intel® Core™ desktop processors are intelligently engineered to push the boundaries of performance. The new processor core architecture transforms hardware and software efficiency and takes advantage of Intel® Deep Learning Boost to accelerate AI performance. Key platform improvements include memory support up to DDR4-3200, up to 20 CPU PCIe 4.0 lanes,1 integrated USB 3.2 Gen 2x2 (20G), and Intel® Optane™ memory H20 with SSD support.2 Together, these technologies bring the power and the intelligence you need to supercharge productivity, stay in the creative flow, and game at the highest level. Product Brief 11th Gen Intel® Core™ Desktop Processors Experience rich, stunning, seamless visuals with the high-performance graphics on 11th Gen Intel® Core™ desktop -

Intel® Omni-Path Architecture (Intel® OPA) for Machine Learning
Big Data ® The Intel Omni-Path Architecture (OPA) for Machine Learning Big Data Sponsored by Intel Srini Chari, Ph.D., MBA and M. R. Pamidi Ph.D. December 2017 mailto:[email protected] Executive Summary Machine Learning (ML), a major component of Artificial Intelligence (AI), is rapidly evolving and significantly improving growth, profits and operational efficiencies in virtually every industry. This is being driven – in large part – by continuing improvements in High Performance Computing (HPC) systems and related innovations in software and algorithms to harness these HPC systems. However, there are several barriers to implement Machine Learning (particularly Deep Learning – DL, a subset of ML) at scale: • It is hard for HPC systems to perform and scale to handle the massive growth of the volume, velocity and variety of data that must be processed. • Implementing DL requires deploying several technologies: applications, frameworks, libraries, development tools and reliable HPC processors, fabrics and storage. This is www.cabotpartners.com hard, laborious and very time-consuming. • Training followed by Inference are two separate ML steps. Training traditionally took days/weeks, whereas Inference was near real-time. Increasingly, to make more accurate inferences, faster re-Training on new data is required. So, Training must now be done in a few hours. This requires novel parallel computing methods and large-scale high- performance systems/fabrics. To help clients overcome these barriers and unleash AI/ML innovation, Intel provides a comprehensive ML solution stack with multiple technology options. Intel’s pioneering research in parallel ML algorithms and the Intel® Omni-Path Architecture (OPA) fabric minimize communications overhead and improve ML computational efficiency at scale. -
Comparison of Technologies for General-Purpose Computing on Graphics Processing Units
Master of Science Thesis in Information Coding Department of Electrical Engineering, Linköping University, 2016 Comparison of Technologies for General-Purpose Computing on Graphics Processing Units Torbjörn Sörman Master of Science Thesis in Information Coding Comparison of Technologies for General-Purpose Computing on Graphics Processing Units Torbjörn Sörman LiTH-ISY-EX–16/4923–SE Supervisor: Robert Forchheimer isy, Linköpings universitet Åsa Detterfelt MindRoad AB Examiner: Ingemar Ragnemalm isy, Linköpings universitet Organisatorisk avdelning Department of Electrical Engineering Linköping University SE-581 83 Linköping, Sweden Copyright © 2016 Torbjörn Sörman Abstract The computational capacity of graphics cards for general-purpose computing have progressed fast over the last decade. A major reason is computational heavy computer games, where standard of performance and high quality graphics con- stantly rise. Another reason is better suitable technologies for programming the graphics cards. Combined, the product is high raw performance devices and means to access that performance. This thesis investigates some of the current technologies for general-purpose computing on graphics processing units. Tech- nologies are primarily compared by means of benchmarking performance and secondarily by factors concerning programming and implementation. The choice of technology can have a large impact on performance. The benchmark applica- tion found the difference in execution time of the fastest technology, CUDA, com- pared to the slowest, OpenCL, to be twice a factor of two. The benchmark applica- tion also found out that the older technologies, OpenGL and DirectX, are compet- itive with CUDA and OpenCL in terms of resulting raw performance. iii Acknowledgments I would like to thank Åsa Detterfelt for the opportunity to make this thesis work at MindRoad AB. -

Gscale: Scaling up GPU Virtualization with Dynamic Sharing of Graphics
gScale: Scaling up GPU Virtualization with Dynamic Sharing of Graphics Memory Space Mochi Xue, Shanghai Jiao Tong University and Intel Corporation; Kun Tian, Intel Corporation; Yaozu Dong, Shanghai Jiao Tong University and Intel Corporation; Jiacheng Ma, Jiajun Wang, and Zhengwei Qi, Shanghai Jiao Tong University; Bingsheng He, National University of Singapore; Haibing Guan, Shanghai Jiao Tong University https://www.usenix.org/conference/atc16/technical-sessions/presentation/xue This paper is included in the Proceedings of the 2016 USENIX Annual Technical Conference (USENIX ATC ’16). June 22–24, 2016 • Denver, CO, USA 978-1-931971-30-0 Open access to the Proceedings of the 2016 USENIX Annual Technical Conference (USENIX ATC ’16) is sponsored by USENIX. gScale: Scaling up GPU Virtualization with Dynamic Sharing of Graphics Memory Space Mochi Xue1,2, Kun Tian2, Yaozu Dong1,2, Jiacheng Ma1, Jiajun Wang1, Zhengwei Qi1, Bingsheng He3, Haibing Guan1 {xuemochi, mjc0608, jiajunwang, qizhenwei, hbguan}@sjtu.edu.cn {kevin.tian, eddie.dong}@intel.com [email protected] 1Shanghai Jiao Tong University, 2Intel Corporation, 3National University of Singapore Abstract As one of the key enabling technologies of GPU cloud, GPU virtualization is intended to provide flexible and With increasing GPU-intensive workloads deployed on scalable GPU resources for multiple instances with high cloud, the cloud service providers are seeking for practi- performance. To achieve such a challenging goal, sev- cal and efficient GPU virtualization solutions. However, eral GPU virtualization solutions were introduced, i.e., the cutting-edge GPU virtualization techniques such as GPUvm [28] and gVirt [30]. gVirt, also known as GVT- gVirt still suffer from the restriction of scalability, which g, is a full virtualization solution with mediated pass- constrains the number of guest virtual GPU instances. -
Matrox MGA-1064SG Developer Specification
Matrox Graphics Inc. Matrox MGA-1064SG Developer Specification Document Number 10524-MS-0100 February 10, 1997 Trademark Acknowledgements MGA,™ MGA-1064SG,™ MGA-1164SG,™ MGA-2064W,™ MGA-2164W,™ MGA-VC064SFB,™ MGA-VC164SFB,™ MGA Marvel,™ MGA Millennium,™ MGA Mystique,™ MGA Rainbow Run- ner,™ MGA DynaView,™ PixelTOUCH,™ MGA Control Panel,™ and Instant ModeSWITCH,™ are trademarks of Matrox Graphics Inc. Matrox® is a registered trademark of Matrox Electronic Systems Ltd. VGA,® is a registered trademark of International Business Machines Corporation; Micro Channel™ is a trademark of International Business Machines Corporation. Intel® is a registered trademark, and 386,™ 486,™ Pentium,™ and 80387™ are trademarks of Intel Corporation. Windows™ is a trademark of Microsoft Corporation; Microsoft,® and MS-DOS® are registered trade- marks of Microsoft Corporation. AutoCAD® is a registered trademark of Autodesk Inc. Unix™ is a trademark of AT&T Bell Laboratories. X-Windows™ is a trademark of the Massachusetts Institute of Technology. AMD™ is a trademark of Advanced Micro Devices. Atmel® is a registered trademark of Atmel Corpora- tion. Catalyst™ is a trademark of Catalyst Semiconductor Inc. SGS™ is a trademark of SGS-Thompson. Toshiba™ is a trademark of Toshiba Corporation. Texas Instruments™ is a trademark of Texas Instru- ments. National™ is a trademark of National Semiconductor Corporation. Microchip™ is a trademark of Microchip Technology Inc. All other nationally and internationally recognized trademarks and tradenames are hereby acknowledged. This document contains confidential proprietary information that may not be disclosed without written permission from Matrox Graphics Inc. © Copyright Matrox Graphics Inc., 1997. All rights reserved. Disclaimer: Matrox Graphics Inc. reserves the right to make changes to specifications at any time and without notice. -

Intel® Arria® 10 Device Overview
Intel® Arria® 10 Device Overview Subscribe A10-OVERVIEW | 2020.10.20 Send Feedback Latest document on the web: PDF | HTML Contents Contents Intel® Arria® 10 Device Overview....................................................................................... 3 Key Advantages of Intel Arria 10 Devices........................................................................ 4 Summary of Intel Arria 10 Features................................................................................4 Intel Arria 10 Device Variants and Packages.....................................................................7 Intel Arria 10 GX.................................................................................................7 Intel Arria 10 GT............................................................................................... 11 Intel Arria 10 SX............................................................................................... 14 I/O Vertical Migration for Intel Arria 10 Devices.............................................................. 17 Adaptive Logic Module................................................................................................ 17 Variable-Precision DSP Block........................................................................................18 Embedded Memory Blocks........................................................................................... 20 Types of Embedded Memory............................................................................... 21 Embedded Memory Capacity in -
Matrox MGA-2164W Developer's Specification
Matrox Graphics Inc. Matrox MGA-2164W Developer’s Specification Document Number 10568-XX-0100 August 18, 1997 Trademark Acknowledgements MGA,™ MGA-1064SG,™ MGA-1164SG,™ MGA-2064W,™ MGA-2164W,™ MGA-VC064SFB,™ MGA-VC164SFB,™ MGA Marvel,™ MGA Millennium,™ MGA Mystique,™ MGA Rainbow Run- ner,™ MGA DynaView,™ PixelTOUCH,™ MGA Control Panel,™ and Instant ModeSWITCH,™ are trademarks of Matrox Graphics Inc. Matrox® is a registered trademark of Matrox Electronic Systems Ltd. VGA,® is a registered trademark of International Business Machines Corporation; Micro Channel™ is a trademark of International Business Machines Corporation. Intel® is a registered trademark, and 386,™ 486,™ Pentium,™ and 80387™ are trademarks of Intel Corporation. Windows™ is a trademark of Microsoft Corporation; Microsoft,® and MS-DOS® are registered trade- marks of Microsoft Corporation. AutoCAD® is a registered trademark of Autodesk Inc. Unix™ is a trademark of AT&T Bell Laboratories. X-Windows™ is a trademark of the Massachusetts Institute of Technology. AMD™ is a trademark of Advanced Micro Devices. Atmel® is a registered trademark of Atmel Corpora- tion. Catalyst™ is a trademark of Catalyst Semiconductor Inc. SGS™ is a trademark of SGS-Thompson. Toshiba™ is a trademark of Toshiba Corporation. Texas Instruments™ is a trademark of Texas Instru- ments. National™ is a trademark of National Semiconductor Corporation. Microchip™ is a trademark of Microchip Technology Inc. All other nationally and internationally recognized trademarks and tradenames are hereby acknowledged. This document contains confidential proprietary information that may not be disclosed without written permission from Matrox Graphics Inc. © Copyright Matrox Graphics Inc., 1997. All rights reserved. Disclaimer: Matrox Graphics Inc. reserves the right to make changes to specifications at any time and without notice.