Internal Organization of the Alpha 21164, a 300-Mhz 64-Bit Quad-Issue CMOS RISC Microprocessor by John H
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Engineering Specification for the KA43 Processor Module Revision 1.0 1–May–1989 COMPANY CONFIDENTIAL RESTRICTED DISTRIBUTION
Engineering Specification for the KA43 Processor Module Revision 1.0 1–May–1989 COMPANY CONFIDENTIAL RESTRICTED DISTRIBUTION COPYRIGHT (c) 1989 by DIGITAL EQUIPMENT CORPORATION This information shall not be disclosed to non-Digital personnel or generally distributed within Digital. Distribution is restricted to persons authorized and designated by the responsible en- gineer or manager. This document shall not be left unattended, and when not in use shall be stored in a locked storage container. The information in this document is subject to change without notice and should not be construed as a commitment by Digital Equipment Corporation. Digital Equipment Corporation assumes no responsibility for any errors that may occur in this document. The information in this document does not describe any program or product currently available from Digital Equipment Corporation. Nor does Digital Equipment Corporation commit to imple- ment this specification in any program or product. Digital Equipment Corporation makes no commitment that this document accurately describes any product which it might ever make. Digital Equipment Corporation CONTENTS Preface . ........................................................... v Chapter 1 INTRODUCTION .............................................. 1 1.1 Scope of Document ................................................... 1 1.2 General Description .................................................. 1 1.3 Applicable Documents ................................................. 2 Chapter 2 KA43 ROM MEMORY ........................................ -

Using the GNU Compiler Collection (GCC)
Using the GNU Compiler Collection (GCC) Using the GNU Compiler Collection by Richard M. Stallman and the GCC Developer Community Last updated 23 May 2004 for GCC 3.4.6 For GCC Version 3.4.6 Published by: GNU Press Website: www.gnupress.org a division of the General: [email protected] Free Software Foundation Orders: [email protected] 59 Temple Place Suite 330 Tel 617-542-5942 Boston, MA 02111-1307 USA Fax 617-542-2652 Last printed October 2003 for GCC 3.3.1. Printed copies are available for $45 each. Copyright c 1988, 1989, 1992, 1993, 1994, 1995, 1996, 1997, 1998, 1999, 2000, 2001, 2002, 2003, 2004 Free Software Foundation, Inc. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with the Invariant Sections being \GNU General Public License" and \Funding Free Software", the Front-Cover texts being (a) (see below), and with the Back-Cover Texts being (b) (see below). A copy of the license is included in the section entitled \GNU Free Documentation License". (a) The FSF's Front-Cover Text is: A GNU Manual (b) The FSF's Back-Cover Text is: You have freedom to copy and modify this GNU Manual, like GNU software. Copies published by the Free Software Foundation raise funds for GNU development. i Short Contents Introduction ...................................... 1 1 Programming Languages Supported by GCC ............ 3 2 Language Standards Supported by GCC ............... 5 3 GCC Command Options ......................... -
The Design and Verification of the Alphastation 600 5-Series Workstation by John H
The Design and Verification of the AlphaStation 600 5-series Workstation by John H. Zurawski, John E. Murray, and Paul J. Lemmon ABSTRACT The AlphaStation 600 5-series workstation is a high-performance, uniprocessor design based on the Alpha 21164 microprocessor and on the PCI bus. Six CMOS ASICs provide high-bandwidth, low-latency interconnects between the CPU, the main memory, and the I/O subsystem. The verification effort used directed, pseudorandom testing on a VERILOG software model. A hardware-based verification technique provided a test throughput that resulted in a significant improvement over software tests. This technique currently involves the use of graphics cards to emulate generic DMA devices. A PCI hardware demon is under development to further enhance the capability of the hardware-based verification. INTRODUCTION The high-performance AlphaStation 600 5-series workstation is based on the fastest Alpha microprocessor to date -- the Alpha 21164.[1] The I/O subsystem uses the 64-bit version of the Peripheral Component Interconnect (PCI) and the Extended Industry Standard Architecture (EISA) bus. The AlphaStation 600 supports three operating systems: Digital UNIX (formerly DEC OSF/1), OpenVMS, and Microsoft's Windows NT. This workstation series uses the DECchip 21171 chip set designed and built by Digital. These chips provide high-bandwidth, low-latency interconnects between the CPU, the main memory, and the PCI bus. This paper describes the architecture and features of the AlphaStation 600 5-series workstation and the DECchip 21171 chip set. The system overview is first presented, followed by a detailed discussion of the chip set. The paper then describes the cache and memory designs, detailing how the memory design evolved from the workstation's requirements. -

6 Preparing to Port Applications 6.1 Ada
Porting Applications from HP OpenVMS Alpha to HP OpenVMS Industry Standard 64 for Integrity Servers Order Number: BA442–90001 January 2005 This manual provides a framework for application developers who are migrating applications from HP OpenVMS Alpha to HP OpenVMS Industry Standard 64 for Integrity Servers. Revision/Update Information: This is a new manual. Software Version: OpenVMS I64 Version 8.2 OpenVMS Alpha Version 8.2 Hewlett-Packard Company Palo Alto, California © Copyright 2005 Hewlett-Packard Development Company, L.P. Confidential computer software. Valid license from HP required for possession, use or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor’s standard commercial license. The information contained herein is subject to change without notice. The only warranties for HP products and services are set forth in the express warranty statements accompanying such products and services. Nothing herein should be construed as constituting an additional warranty. HP shall not be liable for technical or editorial errors or omissions contained herein. Intel, Itanium, and Xeon are trademarks or registered trademarks of Intel Corporation or its subsidiaries in the United States and other countries. Java is a U.S. trademark of Sun Microsystems, Inc. UNIX is a registered trademark of The Open Group. Printed in the US ZK6673 This document was prepared using DECdocument, Version 3.3-1b. Contents Preface ............................................................ ix 1 Introduction 1.1 OpenVMS Industry Standard 64 for Integrity Servers . ............... 1–1 1.2 Overview of the Porting Process . -
Computer Organization EECC 550 • Introduction: Modern Computer Design Levels, Components, Technology Trends, Register Transfer Week 1 Notation (RTN)
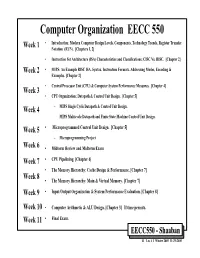
Computer Organization EECC 550 • Introduction: Modern Computer Design Levels, Components, Technology Trends, Register Transfer Week 1 Notation (RTN). [Chapters 1, 2] • Instruction Set Architecture (ISA) Characteristics and Classifications: CISC Vs. RISC. [Chapter 2] Week 2 • MIPS: An Example RISC ISA. Syntax, Instruction Formats, Addressing Modes, Encoding & Examples. [Chapter 2] • Central Processor Unit (CPU) & Computer System Performance Measures. [Chapter 4] Week 3 • CPU Organization: Datapath & Control Unit Design. [Chapter 5] Week 4 – MIPS Single Cycle Datapath & Control Unit Design. – MIPS Multicycle Datapath and Finite State Machine Control Unit Design. Week 5 • Microprogrammed Control Unit Design. [Chapter 5] – Microprogramming Project Week 6 • Midterm Review and Midterm Exam Week 7 • CPU Pipelining. [Chapter 6] • The Memory Hierarchy: Cache Design & Performance. [Chapter 7] Week 8 • The Memory Hierarchy: Main & Virtual Memory. [Chapter 7] Week 9 • Input/Output Organization & System Performance Evaluation. [Chapter 8] Week 10 • Computer Arithmetic & ALU Design. [Chapter 3] If time permits. Week 11 • Final Exam. EECC550 - Shaaban #1 Lec # 1 Winter 2005 11-29-2005 Computing System History/Trends + Instruction Set Architecture (ISA) Fundamentals • Computing Element Choices: – Computing Element Programmability – Spatial vs. Temporal Computing – Main Processor Types/Applications • General Purpose Processor Generations • The Von Neumann Computer Model • CPU Organization (Design) • Recent Trends in Computer Design/performance • Hierarchy -

Digital Technical Journal, Number 7, August 1988: CVAX
Digital Technical Tournal Digital Equipment Corporation Managing Editor Richard W Beam Edltor Jane C. Dlak Pcoductloa St& Production Editor - Helen 1 Partenon Designer - Charlotte Bell Typographers -Jonathan M. Bohy Macgaret Burdine lllusultor - Deborah Kc~lcy Advisoiy Board Samuel H. Fuller, Chairman Robert M. Glorioso John W. McCredle Mahendra R. Patel F. Grant Saviers William D. Srrcckr Victor A. Vyssutsky The Digital Technical Journal is published by Digital Equipment Corporatloa, 77 Reed Road, Hudson, Magsachu~etts0 1749. Changes of address should be sent to Digital Equipment Corporation. attention: List Maintenance. I0 Forbes Road, Northboro, MA 01532 Please indude the address label wlth changes marked. Comments on the content of any paper arc welcomed. Write to the editor at Mall Stop HL02.3/K11 at the published~bpaddress. Comments can ahbe sent on the BNET to RDVAX: :BIAKEor on the ARPANET to B~%RDVAX.DE~DE~. Copyright @ 1988 Digital Equipment Corporation. Copying without fee is permitted provided that such copies are made for use in educational lnstltutions by faculty members and are nor distributed for commercial advantage. Abstncting with credit of Digital Equipment Corporation's authorship is permltted. Requests for other copies for a Pee may br made to Digiul Press of Digital Equipment Corporation. A11 rights reserved. The information in this journal is subject to change without notice and should not bc construed as a com- mltment by Digital Equipment Corporation. Digital Equipment Corpmtion assumes no responslbllity for any errors that may appcss in this document ISSN 0898.901X Documentatlcm Number EY-6742H-DP The following are wademarks of Digital Gquipmcnt Corporation: ALL.IN-I. -
Chapter 1-Introduction to Microprocessors File
Chapter 1 Introduction to Microprocessors Expected Outcomes Explain the role of the CPU, memory and I/O device in a computer Distinguish between the microprocessor and microcontroller Differentiate various form of programming languages Compare between CISC vs RISC and Von Neumann vs Harvard architecture NMKNYFKEEUMP Introduction A microprocessor is an integrated circuit built on a tiny piece of silicon It contains thousands or even millions of transistors which are interconnected via superfine traces of aluminum The transistors work together to store and manipulate data so that the microprocessor can perform a wide variety of useful functions The particular functions a microprocessor perform are dictated by software The first microprocessor was the Intel 4004 (16-pin) introduced in 1971 containing 2300 transistors with 46 instruction sets Power8 processor, by contrast, contains 4.2 billion transistors NMKNYFKEEUMP Introduction Computer is an electronic machine that perform arithmetic operation and logic in response to instructions written Computer requires hardware and software to function Hardware is electronic circuit boards that provide functionality of the system such as power supply, cable, etc CPU – Central Processing Unit/Microprocessor Memory – store all programming and data Input/Output device – the flow of information Software is a programming that control the system operation and facilitate the computer usage Programming is a group of instructions that inform the computer to perform certain task NMKNYFKEEUMP Introduction Computer -

Digital Semiconductor Alpha 21064 and Alpha 21064A Microprocessors Hardware Reference Manual
Digital Semiconductor Alpha 21064 and Alpha 21064A Microprocessors Hardware Reference Manual Order Number: EC–Q9ZUC–TE Abstract: This document contains information about the following Alpha microprocessors: 21064-150, 21064-166, 21064-200, 21064A-200, 21064A-233, 21064A-275, 21064A-275-PC, and 21064A-300. Revision/Update Information: This manual supersedes the Alpha 21064 and Alpha 21064A Microprocessors Hard- ware Reference Manual (EC–Q9ZUB–TE). Digital Equipment Corporation Maynard, Massachusetts June 1996 While Digital believes the information included in this publication is correct as of the date of publication, it is subject to change without notice. Digital Equipment Corporation makes no representations that the use of its products in the manner described in this publication will not infringe on existing or future patent rights, nor do the descriptions contained in this publication imply the granting of licenses to make, use, or sell equipment or software in accordance with the description. © Digital Equipment Corporation 1996. All rights reserved. Printed in U.S.A. AlphaGeneration, Digital, Digital Semiconductor, OpenVMS, VAX, VAX DOCUMENT, the AlphaGeneration design mark, and the DIGITAL logo are trademarks of Digital Equipment Corporation. Digital Semiconductor is a Digital Equipment Corporation business. GRAFOIL is a registered trademark of Union Carbide Corporation. Windows NT is a trademark of Microsoft Corporation. All other trademarks and registered trademarks are the property of their respective owners. This document was prepared using VAX DOCUMENT Version 2.1. Contents Preface ..................................................... xix 1 Introduction to the 21064/21064A 1.1 Introduction ......................................... 1–1 1.2 The Architecture . ................................... 1–1 1.3 Chip Features ....................................... 1–2 1.4 Backward Compatibility ............................... -

Digital Technical Journal, Number 7, August 1988: CVAX-Based Systems
CVAX-based Systems Digital Technical Journal Digital Equipment Corporation umhcr 7 August I9R8 Managing Editor Richard W Beane Editor jane C. Blake Production Staff Produnion Editor- Helen L. Paucrson Designer- Charlo!!<: Bell Typographers- Jonathan !\·f. Uohy Margart:t Burdine lllustrawr- Dt:borah Keeley Advisory Board Samuel H. Fuller, Chairman Robert M. Glorioso John W McCredie Mahendra R. Patel F. Grant Saviers William D. Strecker Victor A. Vyssotsky The Digital Tecbnical jnumal is published by Digital Equipmt:nt Corporation. 77 Reed Road. Hudson. Massachuscus 01749. Changes of address should be sent to Digital E quipment Corporation. aut:ntion: List Maintenance. I 0 Forbes Road. Northboro. MA 015j2. Please includt: the address label with changes marked. Comments on the content of any paper are wclcomt:d. Write to the editor at Mail Stop 1-lLOl-.�/Kil at the published-by address. Comments can also be sent on the ENET to RDV�'X::OIAKE or on the ARPANET to BLA.K.E'X,RDVAX. DEC�)l)ECWRL. Copyright © 1988 Digital Equ ipment Corporation. Copying without fee is permiued providt:d that such copies are made for use in t:duc:uional institmions by faculty members and arc not distributed for commercial advamage. Abstracting with credit of Digital Equipment Corporation's authorship is pcrmiued. Requests for other copies for a fee may be made 10 Digital Press of Digital Equipmem Corporation. All rights reserved. The information in this journal is subject to change without notice and should not be construed as a com miunem by Digital E quipment Corporation. Digital Equipment Corporation assumt:s no responsibility for any errors that may appear in this document. -

Alpha 21064A Microprocessors Data Sheet
Alpha 21064A Microprocessors Data Sheet Order Number: EC–QFGKC–TE This document contains information about the following Alpha micro- processors: 21064A–200, 21064A–233, 21064A–275, 21064A–275–PC, and 21064A–300. Revision/Update Information: This document supersedes the Alpha 21064A–233, –275 Microprocessor Data Sheet, EC–QFGKB–TE. Digital Equipment Corporation Maynard, Massachusetts January 1996 While Digital believes the information included in this publication is correct as of the date of publication, it is subject to change without notice. Digital Equipment Corporation makes no representations that the use of its products in the manner described in this publication will not infringe on existing or future patent rights, nor do the descriptions contained in this publication imply the granting of licenses to make, use, or sell equipment or software in accordance with the description. © Digital Equipment Corporation 1995, 1996. All rights reserved. Printed in U.S.A. AlphaGeneration, Digital, Digital Semiconductor, OpenVMS, VAX, VAX DOCUMENT, the AlphaGeneration design mark, and the DIGITAL logo are trademarks of Digital Equipment Corporation. Digital Semiconductor is a Digital Equipment Corporation business. GRAFOIL is a registered trademark of Union Carbide Corporation. Windows NT is a trademark of Microsoft Corporation. All other trademarks and registered trademarks are the property of their respective owners. This document was prepared using VAX DOCUMENT Version 2.1. Contents 1 Overview ........................................... 1 2 Signal Names and Functions . ........................... 6 3 Instruction Set ....................................... 17 3.1 Instruction Summary ............................... 17 3.2 IEEE Floating-Point Instructions . ................... 23 3.3 21064A IEEE Floating-Point Conformance .............. 25 3.4 VAX Floating-Point Instructions . ................... 28 3.5 Required PALcode Function Codes . -

Design of the RISC-V Instruction Set Architecture
Design of the RISC-V Instruction Set Architecture Andrew Waterman Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-1 http://www.eecs.berkeley.edu/Pubs/TechRpts/2016/EECS-2016-1.html January 3, 2016 Copyright © 2016, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor David Patterson, Chair Professor Krste Asanovi´c Associate Professor Per-Olof Persson Spring 2016 Design of the RISC-V Instruction Set Architecture Copyright 2016 by Andrew Shell Waterman 1 Abstract Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman Doctor of Philosophy in Computer Science University of California, Berkeley Professor David Patterson, Chair The hardware-software interface, embodied in the instruction set architecture (ISA), is arguably the most important interface in a computer system. Yet, in contrast to nearly all other interfaces in a modern computer system, all commercially popular ISAs are proprietary. -

Computer Architectures an Overview
Computer Architectures An Overview PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 25 Feb 2012 22:35:32 UTC Contents Articles Microarchitecture 1 x86 7 PowerPC 23 IBM POWER 33 MIPS architecture 39 SPARC 57 ARM architecture 65 DEC Alpha 80 AlphaStation 92 AlphaServer 95 Very long instruction word 103 Instruction-level parallelism 107 Explicitly parallel instruction computing 108 References Article Sources and Contributors 111 Image Sources, Licenses and Contributors 113 Article Licenses License 114 Microarchitecture 1 Microarchitecture In computer engineering, microarchitecture (sometimes abbreviated to µarch or uarch), also called computer organization, is the way a given instruction set architecture (ISA) is implemented on a processor. A given ISA may be implemented with different microarchitectures.[1] Implementations might vary due to different goals of a given design or due to shifts in technology.[2] Computer architecture is the combination of microarchitecture and instruction set design. Relation to instruction set architecture The ISA is roughly the same as the programming model of a processor as seen by an assembly language programmer or compiler writer. The ISA includes the execution model, processor registers, address and data formats among other things. The Intel Core microarchitecture microarchitecture includes the constituent parts of the processor and how these interconnect and interoperate to implement the ISA. The microarchitecture of a machine is usually represented as (more or less detailed) diagrams that describe the interconnections of the various microarchitectural elements of the machine, which may be everything from single gates and registers, to complete arithmetic logic units (ALU)s and even larger elements.