Innovative Foundation Alternative for High-Speed Rail Application Final Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mezinárodní Komparace Vysokorychlostních Tratí
Masarykova univerzita Ekonomicko-správní fakulta Studijní obor: Hospodářská politika MEZINÁRODNÍ KOMPARACE VYSOKORYCHLOSTNÍCH TRATÍ International comparison of high-speed rails Diplomová práce Vedoucí diplomové práce: Autor: doc. Ing. Martin Kvizda, Ph.D. Bc. Barbora KUKLOVÁ Brno, 2018 MASARYKOVA UNIVERZITA Ekonomicko-správní fakulta ZADÁNÍ DIPLOMOVÉ PRÁCE Akademický rok: 2017/2018 Studentka: Bc. Barbora Kuklová Obor: Hospodářská politika Název práce: Mezinárodní komparace vysokorychlostích tratí Název práce anglicky: International comparison of high-speed rails Cíl práce, postup a použité metody: Cíl práce: Cílem práce je komparace systémů vysokorychlostní železniční dopravy ve vybra- ných zemích, následné určení, který z modelů se nejvíce blíží zamýšlené vysoko- rychlostní dopravě v České republice, a ze srovnání plynoucí soupis doporučení pro ČR. Pracovní postup: Předmětem práce bude vymezení, kategorizace a rozčlenění vysokorychlostních tratí dle jednotlivých zemí, ze kterých budou dle zadaných kritérií vybrány ty státy, kde model vysokorychlostních tratí alespoň částečně odpovídá zamýšlenému sys- tému v ČR. Následovat bude vlastní komparace vysokorychlostních tratí v těchto vybraných státech a aplikace na český dopravní systém. Struktura práce: 1. Úvod 2. Kategorizace a členění vysokorychlostních tratí a stanovení hodnotících kritérií 3. Výběr relevantních zemí 4. Komparace systémů ve vybraných zemích 5. Vyhodnocení výsledků a aplikace na Českou republiku 6. Závěr Rozsah grafických prací: Podle pokynů vedoucího práce Rozsah práce bez příloh: 60 – 80 stran Literatura: A handbook of transport economics / edited by André de Palma ... [et al.]. Edited by André De Palma. Cheltenham, UK: Edward Elgar, 2011. xviii, 904. ISBN 9781847202031. Analytical studies in transport economics. Edited by Andrew F. Daughety. 1st ed. Cambridge: Cambridge University Press, 1985. ix, 253. ISBN 9780521268103. -
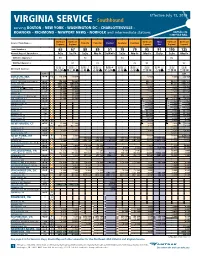
Amtrak Timetables-Virginia Service
Effective July 13, 2019 VIRGINIA SERVICE - Southbound serving BOSTON - NEW YORK - WASHINGTON DC - CHARLOTTESVILLE - ROANOKE - RICHMOND - NEWPORT NEWS - NORFOLK and intermediate stations Amtrak.com 1-800-USA-RAIL Northeast Northeast Northeast Silver Northeast Northeast Service/Train Name4 Palmetto Palmetto Cardinal Carolinian Carolinian Regional Regional Regional Star Regional Regional Train Number4 65 67 89 89 51 79 79 95 91 195 125 Normal Days of Operation4 FrSa Su-Th SaSu Mo-Fr SuWeFr SaSu Mo-Fr Mo-Fr Daily SaSu Mo-Fr Will Also Operate4 9/1 9/2 9/2 9/2 Will Not Operate4 9/1 9/2 9/2 9/2 9/2 R B y R B y R B y R B y R B s R B y R B y R B R s y R B R B On Board Service4 Q l å O Q l å O l å O l å O r l å O l å O l å O y Q å l å O y Q å y Q å Symbol 6 R95 BOSTON, MA ∑w- Dp l9 30P l9 30P 6 10A 6 30A 86 10A –South Station Boston, MA–Back Bay Station ∑v- R9 36P R9 36P R6 15A R6 35A 8R6 15A Route 128, MA ∑w- lR9 50P lR9 50P R6 25A R6 46A 8R6 25A Providence, RI ∑w- l10 22P l10 22P 6 50A 7 11A 86 50A Kingston, RI (b(™, i(¶) ∑w- 10 48P 10 48P 7 11A 7 32A 87 11A Westerly, RI >w- 11 05P 11 05P 7 25A 7 47A 87 25A Mystic, CT > 11 17P 11 17P New London, CT (Casino b) ∑v- 11 31P 11 31P 7 45A 8 08A 87 45A Old Saybrook, CT ∑w- 11 53P 11 53P 8 04A 8 27A 88 04A Springfield, MA ∑v- 7 05A 7 25A 7 05A Windsor Locks, CT > 7 24A 7 44A 7 24A Windsor, CT > 7 29A 7 49A 7 29A Train 495 Train 495 Hartford, CT ∑v- 7 39A Train 405 7 59A 7 39A Berlin, CT >v D7 49A 8 10A D7 49A Meriden, CT >v D7 58A 8 19A D7 58A Wallingford, CT > D8 06A 8 27A D8 06A State Street, CT > q 8 19A 8 40A 8 19A New Haven, CT ∑v- Ar q q 8 27A 8 47A 8 27A NEW HAVEN, CT ∑v- Ar 12 30A 12 30A 4 8 41A 4 9 03A 4 88 41A Dp l12 50A l12 50A 8 43A 9 05A 88 43A Bridgeport, CT >w- 9 29A Stamford, CT ∑w- 1 36A 1 36A 9 30A 9 59A 89 30A New Rochelle, NY >w- q 10 21A NEW YORK, NY ∑w- Ar 2 30A 2 30A 10 22A 10 51A 810 22A –Penn Station Dp l3 00A l3 25A l6 02A l5 51A l6 45A l7 17A l7 25A 10 35A l11 02A 11 05A 11 35A Newark, NJ ∑w- 3 20A 3 45A lR6 19A lR6 08A lR7 05A lR7 39A lR7 44A 10 53A lR11 22A 11 23A 11 52A Newark Liberty Intl. -

Pioneering the Application of High Speed Rail Express Trainsets in the United States
Parsons Brinckerhoff 2010 William Barclay Parsons Fellowship Monograph 26 Pioneering the Application of High Speed Rail Express Trainsets in the United States Fellow: Francis P. Banko Professional Associate Principal Project Manager Lead Investigator: Jackson H. Xue Rail Vehicle Engineer December 2012 136763_Cover.indd 1 3/22/13 7:38 AM 136763_Cover.indd 1 3/22/13 7:38 AM Parsons Brinckerhoff 2010 William Barclay Parsons Fellowship Monograph 26 Pioneering the Application of High Speed Rail Express Trainsets in the United States Fellow: Francis P. Banko Professional Associate Principal Project Manager Lead Investigator: Jackson H. Xue Rail Vehicle Engineer December 2012 First Printing 2013 Copyright © 2013, Parsons Brinckerhoff Group Inc. All rights reserved. No part of this work may be reproduced or used in any form or by any means—graphic, electronic, mechanical (including photocopying), recording, taping, or information or retrieval systems—without permission of the pub- lisher. Published by: Parsons Brinckerhoff Group Inc. One Penn Plaza New York, New York 10119 Graphics Database: V212 CONTENTS FOREWORD XV PREFACE XVII PART 1: INTRODUCTION 1 CHAPTER 1 INTRODUCTION TO THE RESEARCH 3 1.1 Unprecedented Support for High Speed Rail in the U.S. ....................3 1.2 Pioneering the Application of High Speed Rail Express Trainsets in the U.S. .....4 1.3 Research Objectives . 6 1.4 William Barclay Parsons Fellowship Participants ...........................6 1.5 Host Manufacturers and Operators......................................7 1.6 A Snapshot in Time .................................................10 CHAPTER 2 HOST MANUFACTURERS AND OPERATORS, THEIR PRODUCTS AND SERVICES 11 2.1 Overview . 11 2.2 Introduction to Host HSR Manufacturers . 11 2.3 Introduction to Host HSR Operators and Regulatory Agencies . -

Service Delivery to Informal Settlements in South Asia's
SERVICE DELIVERY TO INFORMAL SETTLEMENTS IN SOUTH ASIA’S MEGA CITIES The Role of State and Non‐State Actors By Faisal Haq Shaheen H.B.Sc. (University of Toronto, 1995), M.B.A. (York University, 1997), M.A. (Ryerson University, 2009) a Dissertation presented to Ryerson University in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the program of Policy Studies Toronto, Ontario, Canada, 2017 © Faisal Haq Shaheen 2017 i Author's Declaration I hereby declare that I am the sole author of this dissertation. This is a true copy of the dissertation, including any required final revisions, as accepted by my examiners. I authorize Ryerson University to lend this dissertation to other institutions or individuals for the purpose of scholarly research. I further authorize Ryerson University to lend this dissertation to other institutions or individuals for the purpose of scholarly research. I further authorize Ryerson University to reproduce this dissertation by photocopying or by other means, in total or in part, at the request of other institutions or individuals for the purpose of scholarly research. I understand that my dissertation may be made electronically available to the public. ii Service Delivery to Informal Settlements in South Asia's Mega Cities, the Role of State and Non‐State Actors, Ph.D., 2017, Faisal Haq Shaheen, Policy Studies, Ryerson University Abstract This interdisciplinary research project compares service delivery outcomes to informal settlements in South Asia’s largest urban centres: Dhaka, Karachi and Mumbai. These mega cities have been overwhelmed by increasing demands on limited service delivery capacity as growing clusters of informal settlements, home to significant numbers of informal sector workers, struggle to obtain basic services. -

Bilevel Rail Car - Wikipedia
Bilevel rail car - Wikipedia https://en.wikipedia.org/wiki/Bilevel_rail_car Bilevel rail car The bilevel car (American English) or double-decker train (British English and Canadian English) is a type of rail car that has two levels of passenger accommodation, as opposed to one, increasing passenger capacity (in example cases of up to 57% per car).[1] In some countries such vehicles are commonly referred to as dostos, derived from the German Doppelstockwagen. The use of double-decker carriages, where feasible, can resolve capacity problems on a railway, avoiding other options which have an associated infrastructure cost such as longer trains (which require longer station Double-deck rail car operated by Agence métropolitaine de transport platforms), more trains per hour (which the signalling or safety in Montreal, Quebec, Canada. The requirements may not allow) or adding extra tracks besides the existing Lucien-L'Allier station is in the back line. ground. Bilevel trains are claimed to be more energy efficient,[2] and may have a lower operating cost per passenger.[3] A bilevel car may carry about twice as many as a normal car, without requiring double the weight to pull or material to build. However, a bilevel train may take longer to exchange passengers at each station, since more people will enter and exit from each car. The increased dwell time makes them most popular on long-distance routes which make fewer stops (and may be popular with passengers for offering a better view).[1] Bilevel cars may not be usable in countries or older railway systems with Bombardier double-deck rail cars in low loading gauges. -

Transbay Transit Center
Transbay Transit Center TRANSBAY JOINT POWERS AUTHORITY FREQUENTLY ASKED QUESTIONS Transbay Transit Center Why do we need the Transbay Transit Center? It is time for public infrastructure to meet the needs of the 21st century. The project will centralize a fractured regional transportation network—making transit connections be- tween all points in the Bay Area fast and convenient. The new Transit Center will make public transit a convenient option as it is in other world-class cities, allowing people to travel and commute without the need for a car, thereby decreasing congestion and pollution. The Transit Center will provide a downtown hub in the heart of a new transit- friendly neighborhood with new homes, parks and shops, providing access to public transit literally at the foot of people’s doors. When will I be able to use the Transit Center? The Transit Center building will be completed in 2017 and will be a bustling transit and retail center for those who live, work and visit the heart of downtown San Francisco. When will I be able to take Caltrain into the new Transit Center? The construction of the underground rail extension for the Caltrain rail line and future High Speed Rail is planned to begin in 2012. It is estimated to be completed and operational, along with the Transit Center’s underground rail station, in 2018 or sooner if funding becomes What is the Transbay Transit available. Center Project? How many people will use it? When the rail component is complete, it is estimated that The Transbay Transit Center Project is a visionary more than 20 million people will use the Transit Center transportation and housing project that will transform annually. -

Global Competitiveness in the Rail and Transit Industry
Global Competitiveness in the Rail and Transit Industry Michael Renner and Gary Gardner Global Competitiveness in the Rail and Transit Industry Michael Renner and Gary Gardner September 2010 2 GLOBAL COMPETITIVENESS IN THE RAIL AND TRANSIT INDUSTRY © 2010 Worldwatch Institute, Washington, D.C. Printed on paper that is 50 percent recycled, 30 percent post-consumer waste, process chlorine free. The views expressed are those of the authors and do not necessarily represent those of the Worldwatch Institute; of its directors, officers, or staff; or of its funding organizations. Editor: Lisa Mastny Designer: Lyle Rosbotham Table of Contents 3 Table of Contents Summary . 7 U.S. Rail and Transit in Context . 9 The Global Rail Market . 11 Selected National Experiences: Europe and East Asia . 16 Implications for the United States . 27 Endnotes . 30 Figures and Tables Figure 1. National Investment in Rail Infrastructure, Selected Countries, 2008 . 11 Figure 2. Leading Global Rail Equipment Manufacturers, Share of World Market, 2001 . 15 Figure 3. Leading Global Rail Equipment Manufacturers, by Sales, 2009 . 15 Table 1. Global Passenger and Freight Rail Market, by Region and Major Industry Segment, 2005–2007 Average . 12 Table 2. Annual Rolling Stock Markets by Region, Current and Projections to 2016 . 13 Table 3. Profiles of Major Rail Vehicle Manufacturers . 14 Table 4. Employment at Leading Rail Vehicle Manufacturing Companies . 15 Table 5. Estimate of Needed European Urban Rail Investments over a 20-Year Period . 17 Table 6. German Rail Manufacturing Industry Sales, 2006–2009 . 18 Table 7. Germany’s Annual Investments in Urban Mass Transit, 2009 . 19 Table 8. -
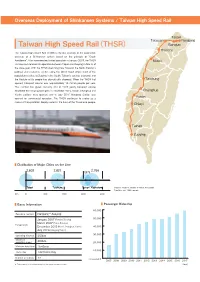
Overseas Deployment of Shinkansen Systems / Taiwan High Speed Rail
Overseas Deployment of Shinkansen Systems / Taiwan High Speed Rail Taipei Taoyuan Nangang Taiwan High Speed Rail( THSR) Banqiao Hsinchu The Taiwan High Speed Rail (THSR) is the first example of the exportation overseas of a Shinkansen system based on the principle of “Crash Avoidance”. After commencing limited operation in January 2007, the THSR Miaoli commenced commercial operation between Taipei and Zuoying in March of the same year. With the THSR stretching from Taipei in the North, Taiwan’s political and economic center, along the West Coast where most of the population resides, to Zuoying in the South, Taiwan’s society, economy, and the lifestyle of its people has dramatically changed. When the THSR first Taichung opened, transport volume was approximately 15 million people per year. This number has grown annually and in 2017 yearly transport volume exceeded 60 million passengers. In December 2015, Miaoli, Changhua and Changhua Yunlin stations were opened, and in July 2016 Nangang Station was Yunlin opened for commercial operation. The THSR continues to evolve as a means of transportation deeply rooted in the lives of the Taiwanese people. Chiayi Tainan Zuoying ■ Distribution of Major Cities on the Line 2,602 2,821 2,766 1,875 Taipei Taichung Tainan Kaohsiung Statistics Yearbook, Ministry of Interior, ROC(2020) Population unit: 1,000’s people km 0 100 200 300 400 ■ Basic Information ■ Passenger Ridership 60,000 Operating segment Nangang-Zuoying 50,000 January 2007 (Banqiao-Zuoying) March 2007 (Taipei-Banqiao) Inauguration December 2015 (Miaoli, Changhua, Yunlin) 40,000 July 2016 (Nangang-Taipei) 30,000 Operating distance 350km Maximum 300km operating speed 20,000 Minimum travel time 1h 45min 10,000 Trains/day 142 trains/day Number of stations 12 (Thousand)0 2007 2008 2009 2010 2011 2012 20 13 2014 2015 2016 2017 ※ Train number is calculated based on the annual number of trains. -

Railway Accident Investigation Report
RA2007-8-I Railway Accident Investigation Report Train Derailment Accident between Urasa station and Nagaoka station of the Joetsu Shinkansen of the East Japan Railway Company November 30, 2007 Aircraft and Railway Accidents Investigation Commission i The objective of the investigation conducted by the Japan Transport Safety Board in accordance with the Act for Establishment of the Aircraft and Railway Accidents Investigation Commission to determine the causes of an accident and damage incidental to such an accident, thereby preventing future accidents and reducing damage. It is not the purpose of the investigation to apportion blame or liability. Norihiro Goto Chairman Aircraft and Railway Accidents Investigation Commission Note: This report is a translation of the Japanese original investigation report. The text in Japanese shall prevail in the interpretation of the report. ii Railway Accident Investigation Report Railway operator : East Japan Railway Company Accident type : Train derailment Date and time : About 17:56, October 23, 2004 Location : Around 206,207 m from the origin in Omiya Station, between Urasa station and Nagaoka station, Joetsu Shinkansen, Nagaoka City, Niigata Prefecture November 1, 2007 Adopted by the Aircraft and Railway Accidents Investigation Commission Chairman Norihiro Goto Member Yukio Kusuki Member Toshiko Nakagawa Member Akira Matsumoto Member Masayuki Miyamoto Member Norio Tomii Member Shinsuke Endoh Member Noboru Toyooka Member Yuki Shuto Member Akiko Matsuo iii Contents 1. PROCESS AND PROGRESS OF THE RAILWAY ACCIDENT INVESTIGATION 1 1.1. Summary of the Railway Accident 1 1.2. Outline of the Railway Accident Investigation 1 1.2.1. Organization of the Investigation 1 1.2.2. Implementation of the Investigation 2 1.2.3. -

Transbay Joint Powers Authority
NEW ISSUE – Book-Entry Only RATINGS: See “RATINGS” In the opinion of Bond Counsel, under existing law and assuming compliance with the tax covenants described herein, and the accuracy of certain representations and certifications made by the Authority, interest on the 2020 Tax-Exempt Bonds is excluded from gross income for federal income tax purposes under Section 103 of the Internal Revenue Code of 1986, as amended (the “Code”). Bond Counsel is also of the opinion that interest on the 2020 Tax-Exempt Bonds is not treated as a preference item in calculating the alternative minimum tax imposed under the Code. Interest on the Senior 2020A-T Bonds is not excluded from gross income for federal income tax purposes. Bond Counsel is further of the opinion that interest on the 2020 Bonds is exempt from personal income taxes of the State of California (the “State”) under present State law. See “2020 TAX-EXEMPT BONDS TAX MATTERS” and “SENIOR 2020A-T BONDS TAX MATTERS” in this Official Statement regarding certain other tax considerations. TRANSBAY JOINT POWERS AUTHORITY $189,480,000 $28,355,000 Senior Tax Allocation Bonds Senior Tax Allocation Bonds Series 2020A (Tax-Exempt) (Green Bonds) Series 2020A-T (Federally Taxable) (Green Bonds) $53,370,000 Subordinate Tax Allocation Bonds Series 2020B (Tax-Exempt) (Green Bonds) Dated: Date of Delivery Due: October 1, as shown on inside cover Bonds. The Transbay Joint Powers Authority (the “Authority”) is issuing the above-captioned bonds (the “Senior 2020A Bonds,” the “Senior 2020A-T Bonds,” and the “Subordinate 2020B Bonds” and, collectively, the “2020 Bonds”). -

Shinkansen - Wikipedia 7/3/20, 10�48 AM
Shinkansen - Wikipedia 7/3/20, 10)48 AM Shinkansen The Shinkansen (Japanese: 新幹線, pronounced [ɕiŋkaꜜɰ̃ seɴ], lit. ''new trunk line''), colloquially known in English as the bullet train, is a network of high-speed railway lines in Japan. Initially, it was built to connect distant Japanese regions with Tokyo, the capital, in order to aid economic growth and development. Beyond long-distance travel, some sections around the largest metropolitan areas are used as a commuter rail network.[1][2] It is operated by five Japan Railways Group companies. A lineup of JR East Shinkansen trains in October Over the Shinkansen's 50-plus year history, carrying 2012 over 10 billion passengers, there has been not a single passenger fatality or injury due to train accidents.[3] Starting with the Tōkaidō Shinkansen (515.4 km, 320.3 mi) in 1964,[4] the network has expanded to currently consist of 2,764.6 km (1,717.8 mi) of lines with maximum speeds of 240–320 km/h (150– 200 mph), 283.5 km (176.2 mi) of Mini-Shinkansen lines with a maximum speed of 130 km/h (80 mph), and 10.3 km (6.4 mi) of spur lines with Shinkansen services.[5] The network presently links most major A lineup of JR West Shinkansen trains in October cities on the islands of Honshu and Kyushu, and 2008 Hakodate on northern island of Hokkaido, with an extension to Sapporo under construction and scheduled to commence in March 2031.[6] The maximum operating speed is 320 km/h (200 mph) (on a 387.5 km section of the Tōhoku Shinkansen).[7] Test runs have reached 443 km/h (275 mph) for conventional rail in 1996, and up to a world record 603 km/h (375 mph) for SCMaglev trains in April 2015.[8] The original Tōkaidō Shinkansen, connecting Tokyo, Nagoya and Osaka, three of Japan's largest cities, is one of the world's busiest high-speed rail lines. -

Taskload Report Outline
U.S. Department of Transportation Comparison of FRA Regulations to International Federal Railroad High-Speed Rail Standards Administration Office of Research and Development Washington, DC 20590 DOT/FRA/ORD -13/30 Final Report May 2013 NOTICE This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. Any opinions, findings and conclusions, or recommendations expressed in this material do not necessarily reflect the views or policies of the United States Government, nor does mention of trade names, commercial products, or organizations imply endorsement by the United States Government. The United States Government assumes no liability for the content or use of the material contained in this document. NOTICE The United States Government does not endorse products or manufacturers. Trade or manufacturers’ names appear herein solely because they are considered essential to the objective of this report. REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503.