Unit Ueeneeg006a Solve Problems in Single and Three Phase Low Voltage Machines
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mutual Inductance and Transformer Theory Questions: 1 Through 15 Lab Exercise: Transformer Voltage/Current Ratios (Question 61)
ELTR 115 (AC 2), section 1 Recommended schedule Day 1 Topics: Mutual inductance and transformer theory Questions: 1 through 15 Lab Exercise: Transformer voltage/current ratios (question 61) Day 2 Topics: Transformer step ratio Questions: 16 through 30 Lab Exercise: Auto-transformers (question 62) Day 3 Topics: Maximum power transfer theorem and impedance matching with transformers Questions: 31 through 45 Lab Exercise: Auto-transformers (question 63) Day 4 Topics: Transformer applications, power ratings, and core effects Questions: 46 through 60 Lab Exercise: Differential voltage measurement using the oscilloscope (question 64) Day 5 Exam 1: includes Transformer voltage ratio performance assessment Lab Exercise: work on project Project: Initial project design checked by instructor and components selected (sensitive audio detector circuit recommended) Practice and challenge problems Questions: 66 through the end of the worksheet Impending deadlines Project due at end of ELTR115, Section 3 Question 65: Sample project grading criteria 1 ELTR 115 (AC 2), section 1 Project ideas AC power supply: (Strongly Recommended!) This is basically one-half of an AC/DC power supply circuit, consisting of a line power plug, on/off switch, fuse, indicator lamp, and a step-down transformer. The reason this project idea is strongly recommended is that it may serve as the basis for the recommended power supply project in the next course (ELTR120 – Semiconductors 1). If you build the AC section now, you will not have to re-build an enclosure or any of the line-power circuitry later! Note that the first lab (step-down transformer circuit) may serve as a prototype for this project with just a few additional components. -
Power Source for High Voltage Column of Injector to Proton
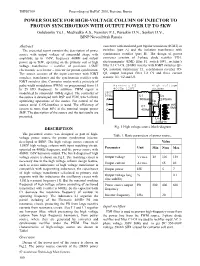
THPSC018 Proceedings of RuPAC-2010, Protvino, Russia POWER SOURCE FOR HIGH-VOLTAGE COLUMN OF INJECTOR TO PROTON SYNCHROTRON WITH OUTPUT POWER UP TO 5KW Golubenko Yu.I., Medvedko A.S., Nemitov P.I., Pureskin D.N., Senkov D.V., BINP Novosibirsk Russia Abstract converter with insulated gate bipolar transistors (IGBT) as The presented report contains the description of power switches (part A) and the isolation transformer with source with output voltage of sinusoidal shape with synchronous rectifier (part B). The design of power amplitude up to 150V, frequency 400Hz and output converter consists of 3-phase diode rectifier VD1, power up to 5kW, operating on the primary coil of high electromagnetic (EMI) filter F1, switch SW1, rectifier’s voltage transformer - rectifier of precision 1.5MV filter L1 C1-C8, 20 kHz inverter with IGBT switches Q1- electrostatic accelerator – injector for proton synchrotron. Q4, isolation transformer T1, synchronous rectifier O5- The source consists of the input converter with IGBT Q8, output low-pass filter L2 C9 and three current switches, transformer and the synchronous rectifier with sensors: U1, U2 and U3. IGBT switches also. Converter works with a principle of pulse-width modulation (PWM) on programmed from 15 Harmonic PS High voltage to 25 kHz frequency. In addition, PWM signal is 400Hz 120V column modulated by sinusoidal 400Hz signal. The controller of 380V the source is developed with DSP and PLM, which allows 50Hz L1 Ls A 900uHn 230uHn optimizing operations of the source. For control of the Cp B 80uF out source serial CAN-interface is used. The efficiency of C1 1.5MV system is more than 80% at the nominal output power C 400uF 5kW. -

B. Tech Electrical.Pdf
JECRC University Course Structure for Electrical Engineering (B.Tech.) JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester III Subject Code Subject Contact Hrs Credits L-T-P Electronics Devices & Circuits 3-1-2 5 Circuit Analysis – I 3-1-0 4 Electrical Machines – I 3-1-2 5 Electrical Measurements 3-1-2 5 Mathematics – III 3-1-0 4 Computer Programming – I 3-0-2 4 Total 18-5-8 27 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester IV Subject Code Subject Contact Hrs Credits L-T-P Analogue Electronics 3-1-2 5 Digital Electronics 3-0-2 4 Circuit Analysis – II 3-1-0 4 Electrical Machines – II 3-1-2 5 Advanced Mathematics 3-1-0 4 Generation of Electric Power 3-0-0 3 Total 18-4-6 25 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester V Subject Code Subject Contact Hrs Credits L-T-P Power Electronics-I 3-1-2 5 Microprocessor & Computer 3-0-2 4 Architecture Transmission & Distribution – I 3-1-0 4 Control Systems 3-1-2 5 Utilization of Electrical Power 3-0-0 3 Digital Signal Processing 3-0-0 3 Total 18-3-6 24 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester VI Subject Code Subject Contact Hrs Credits L-T-P Power Electronics –II 3-1-2 5 Power System Analysis 3-1-2 5 EHV AC/DC Transmission 3-0-0 3 Switch Gear & protection 3-0-0 3 Instrumentation 3-0-0 3 Transmission & Distribution – II 3-1-0 4 Economics 0-0-2 1 -

Tesla Coil Works
Matt Behrend http://home.earthlink.net/~electronxlc/ How a Tesla Coil works On this page, I will explain the basic theory of how a Tesla coil works. Below is the Table of Contents for this page. z Description of Components z How the Components Operate z LC Circuits z Voltage Gain z Resonant Rise z Oscillation and Tuning z Quarter Wavelength Frequency Description of Components A Tesla coil is a high-voltage air-core resonant transformer. A Tesla coil has 6 basic components. The first is the primary transformer, which is a high-voltage iron-core transformer. The second is the tank capacitor, which is a high-voltage capacitor that is usually homemade, but can be purchased for a high price from commercial suppliers. The third is the spark gap, basically two wires separated by a small gap of air. The fourth is the primary coil consisting of about 10 to 15 turns of thick heavy gauge wire wound around the base of the secondary coil. The fifth is the secondary coil, and it consists of many hundreds of turns of relatively thin, small gauge enameled wire. The primary and secondary coils make up an air-core transformer. That means that there is no iron core inside of the coils. The sixth basic component is the toroid. It is usually an aluminum doughnut-shaped object, and placed on top of the secondary coil. The high-voltage sparks radiate in all directions from the toroid out into the air. How the Components Operate The primary transformer converts the AC line voltage (120/240 volts AC) to over 10,000 volts. -

Outdoor Instrument Transformers
Outdoor Instrument Transformers Buyer’s Guide Contents Table of Contents Chapter - Page Products Introduction A - 2 Explanations B - 1 Silicone Rubber (SIR) Insulators C - 1 Design Features and Advantages Current Transformers IMB D - 1 Inductive Voltage Transformer EMF E - 1 Capacitor Voltage Transformer CPA/CPB F - 1 Technical Technical Catalogues Information CT IMB G - 1 VT EMF H - 1 CVT CPA/CPB (IEC) I - 1 CVT CPA/CPB (ANSI) J - 1 Optional Cable Entry Kits - Roxtec CF 16 K - 1 Quality Control and Testing L - 1 Inquiry and Ordering Data M - 1 A-1 Edition 5, 2008-03 ABB Instrument Transformers — Buyer’s Guide Introduction Day after day, all year around— with ABB Instrument Transformers ABB has been producing instrument trans- All instrument transformers supplied by ABB formers for more than 60 years. Thousands are tailor-made to meet the needs of our of our products perform vital functions in customers. electric power networks around the world – An instrument transformer must be capable of day after day, all year round. withstanding very high stresses in all climatic Their main applications include revenue conditions. We design and manufacture our metering, control, indication and relay pro- products for a service life of at least 30 years. tection. Actually, most last even longer. Product range Type Highest Voltage for Equipment (kV) Current Transformer IMB Hairpin/Tank type IMB 36 - 800 36 - 765 Paper, mineral oil insulation, quartz filling Inductive Voltage Transformer EMF Paper, mineral oil insulation, quartz filling EMF 52 - 170 52 - 170 Capacitor Voltage Transformer CP CVD: Mixed dielectric polypropylene-film and synthetic oil. -

Practices of Insulating Materials in Instrument Transformers
500 NATIONAL POWER SYSTEMS CONFERENCE, NPSC 2002 Practices of Insulating Materials in Instrument Transformers A.Masood, M.U.Zuberi, M.S.Alam, E.Husain, M.Y.Khan I. INTRODUCTION TABLE I Type of Test Applied on The study of insulating material selection, behavior and Type Test CT PT performance are important aspects to be considered for Short Time Current Test Yes No designing any electrical instrument, machine or device. Temperature Rise Test Yes Yes Apart from conductors, insulator forms the backbone of Lightning Impulse Voltage Withstand Yes Yes any electrical system. Though insulators form the Test backbone, they are also the weakest link in the system. H.V.Power Frequency Wet Withstand Yes Yes Hence, maximum care and attention is needed while Test choosing insulating materials for a given application so Routine Test that it gives the desired performance under worst working conditions. This paper addresses the problem of selection H.V. Power Frequency Dry Withstand Yes Yes criteria, test specifications and material treatment to justify Test on Primary Winding the use of various dielectrics/insulating materials used for H.V. Power Frequency Dry Withstand Yes Yes insulating high voltage instrument transformers i.e. CTs Test on Secondary Winding and PTs. Over-Voltage Inter-turn Test While in use, insulating materials are subjected to Partial Discharge Test Yes No various electrical, mechanical, thermal stresses and partial Yes Yes discharges. Therefore, criteria for selection of these materials is, that, they must withstand these stresses The temperature rise of winding when subjected to without or with such rate of deterioration such that their continuous thermal current or voltage as applicable to performance is not affected throughout the life expectancy instrument transformer at the rated frequency and of the equipment, which is considered approximately 25- current/voltage output determines the class of insulation or 30 years.[1] dielectric surrounding the winding. -

Theory and Technology of Instrument Transformers
THEORY AND TECHNOLOGY OF INSTRUMENT TRANSFORMERS TRAINING BOOKLET: 2 The information in this document is subject to change. Contact ARTECHE to confi rm the characteristics and availability of the products described here. Jaime Berrosteguieta / Ángel Enzunza © ARTECHE Moving together CONTENTS 1. Instrument Transformers | 4 5. Other Instrument Transformers | 31 1.1. Defi nitions | 4 5.1. Combined Instrument 1.2. Objective | 4 Transformers | 31 1.3. General Points in 5.2. Capacitive Voltage Current Transformers | 5 Transformers (CVT) | 32 1.4 General Points in Voltage Transformers | 6 6. Dielectric insulation | 33 6.1. Insulation of instrument 2. Theory of Instrument Transformers | 7 transformers | 33 2.1. Basics | 7 6.2. Insulation Testing | 34 2.2. Equivalent Transformer | 8 2.3. Equivalent Transformer Standards | 35 circuit Diagram | 8 7. 7.1. Standards Consulted | 35 7.2. Insulation Levels | 35 3. Current Transformers | 9 7.3. Environmental Conditions | 35 3.1. General Equations | 9 7.4. Current Transformers | 36 3.2. Vectorial Diagram | 9 7.5. Voltage Transformers | 43 3.3. Current & Phase Errors | 10 3.4. Current Transformers for Measuring | 12 3.5. Current Transformers for Protection | 14 3.6. Current Transformers for Protection which Require Transient Regime Response | 16 3.7. Burden | 18 3.8. Resistance to Short-circuits | 19 3.9. Operation of an Open Circuit Current Transformer| 20 3.10. Special Versions of Current Transformers | 20 3.11. Choosing a Current Transformer | 21 4. Voltage Transformers | 22 4.1. General Equations | 22 4.2. Vectorial Diagram | 22 4.3. Voltage & Phase Errors | 23 4.4. Voltage Transformers for Measuring | 24 4.5. -
Practical Transformer Handbook
Practical Transformer Handbook Practical Transformer Handbook Irving M. Gottlieb RE. <» Newnes OXFORD BOSTON JOHANNESBURG MELBOURNE NEW DELHI SINGAPORE Newnes An Imprint of Butterworth-Heinemann Linacre House, Jordan Hill, Oxford OX2 8DP 225 Wildwood Avenue, Woburn, MA 01801-2041 A division of Reed Educational and Professional Publishing Ltd S. A member of the Reed Elsevier pic group First published 1998 Transferred to digital printing 2004 © Irving M. Gottlieb 1998 All rights reserved. No part of this publication may be reproduced in any material form (including photocopying or storing in any medium by electronic means and whether or not transiently or incidentally to some other use of this publication) without the written permission of the copyright holder except in accordance with the provisions of the Copyright, Designs and Patents Act 1988 or under the terms of a licence issued by the Copyright Licensing Agency Ltd, 90 Tottenham Court Road, London, England WIP 9HE. Applications for the copyright holder's written permission to reproduce any part of this publication should be addressed to the publishers British Library Cataloguing in Publication Data A catalogue record for this book is available from the British Library ISBN 0 7506 3992 X Library of Congress Cataloguing in Publication Data A catalogue record for this book is available from the Library of Congress DLAOTA TREE Typeset by Jayvee, Trivandrum, India Contents Preface ix Introduction xi 1 An overview of transformer sin electrical technology 1 Amber, lodestones, galvanic cells -

Transformers Are Used Extensively for AC Power Transmissions
www.PDHcenter.com PDH Course E164 www.PDHonline.org Overview & Energy Optimization of Power Distribution Transformers Course Content A transformer is a static piece of apparatus used for transferring power from one AC circuit to another at a different voltage, but without change in frequency. It can step up or step down the voltage level with a corresponding decrease or increase of current. These are used extensively for AC power transmissions and for various control and indication circuits. Knowledge of the basic theory of how these components operate is necessary to understand the role transformers play in today’s facilities. MUTUAL INDUCTANCE A transformer operates on the principal of magnetic induction. When an AC voltage is applied to a coil, it produces a varying magnetic field around the coil. If a second coil is placed within this magnetic field then a voltage is induced in this second coil. This is called mutual induction. The magnetic field strength H, required to produce a magnetic flux density B, is proportional to the current flowing in the coil. The figure below shows the flux produced by the currents in the primary and secondary windings of a transformer when source current is flowing in the primary winding. Relationship between current, magnetic field strength and flux BASIC TRANSFORMER ACTION Each transformer consists of two or more coils which are not electrically connected, but are arranged in such a way that the magnetic field surrounding one coil cuts through the other coil. When an alternating voltage is applied to the one coil, the varying magnetic field set up around this coil creates an alternating voltage in the other coil. -
Single-Phase Transformer (Low Power Rating) Secondary (Output) AC Voltage Often Converted to DC for Use in Electronic Applications
ELL 100 - Introduction to Electrical Engineering LECTURE 32: TRANSFORMERS - I Outline Need for and types of transformers Magnetically coupled circuits & ideal transformer Working principle of transformer Practical transformer: various types of losses Numerical examples/exercises 2 TRANSFORMERS IN POWER GENERATION 3 TRANSFORMERS IN POWER TRANSMISSION 4 TRANSFORMERS IN POWER DISTRIBUTION . 5 TRANSFORMERS IN POWER UTILIZATION Welding transformer High frequency transformers used in electronic power supplies 6 NEED FOR TRANSFORMERS Power transmission at high voltage while utilization at low voltage • Estimating resistance of line, typically 0.001 Ω/m => 20 Ω for 200-km • Current required to glow bulb: IPVA10 22 • Total power loss in line: PIRWloss 10 20 2000 P 120 • Efficiency: 100 5.66% (very small!) PPloss 2000 120 To improve η, decrease I in transmission (i.e. increase V for same power) 7 NEED FOR TRANSFORMERS • Transformer: Receives AC electrical power at one voltage level and delivers/transfers it at another voltage level (higher for “step-up” and lower for “step-down”). • Need in modern power systems: Long distance power lines can have significant I2R losses. The same power can be delivered by high-voltage transmission lines at a fraction of the current and with much higher efficiency. This feature is one of the main advantages of AC transmission and distribution over DC system. 8 TRANSFORMERS IN POWER SYSTEM Step-Up Transformer at Generator and Step-Down Transformer at Consumer 9 HISTORY AND INVENTION • 1886: Earliest known transformers used for first long-distance AC electric lighting system in Great Barrington, Massachusetts, USA. • Used to transmit power from 25-hp steam-engine-driven alternator generating 500 V & 12 A to power light bulbs 4000-ft away. -

The TESLA Coil
Université Libre de Bruxelles The TESLA coil Christopher Gerekos, 2nd year Physics undergraduate student. “Let the future tell the truth and evaluate each one according to his work and accomplishments. The present is theirs; the future, for which I really worked, is mine.” -Nikola Tesla 2011-2012 Special thanks This Tesla coil never would have existed without my friend Mael Flament, former student at the Université Libre de Bruxelles, now studying at the Hawaii University (Manoa). He initiated the idea of this project and taught me the basics of electrical engineering and crafting. I also thank Kevin Wilson, creator of the TeslaMap program and webmaster of Tesla Coil Design, Construction and Operation Guidei, which were my main guides during the early stages of the conception and construction of the coil. He also proofread this English version of the present document. Thanks to Thomas Vandermergel for his participation in the Printemps des Sciences fair and to Jean- Louis Colot for his guidance and his awesome photographs of Zeus. I also express my full gratitude to my family for their support. iReferenced in the Bibliography. Contents 1 Introduction 1 2 The Zeus Project 3 3 Theory of operation 5 3.1 Reminder of the basics.......................................5 3.1.1 Resistor...........................................5 3.1.2 Capacitor..........................................6 3.1.3 Inductor...........................................6 3.1.4 Impedance.........................................7 3.2 LC circuit..............................................8 3.2.1 Impedance......................................... 12 3.2.2 Resonant frequency.................................... 13 3.2.3 RLC circuit......................................... 13 3.3 Tesla coil operation......................................... 15 3.3.1 Description of a cycle................................... 15 3.3.2 Voltage gain........................................ -
Power Combiners, Impedance Transformers and Directional Couplers
High Frequency Design From December 2007 High Frequency Electronics Copyright © 2007 Summit Technical Media, LLC COMBINERS & COUPLERS Power Combiners, Impedance Transformers and Directional Couplers By Andrei Grebennikov Infineon/DICE any RF applica- Transmission-Line Transformers This is the first of a multi- tions require and Combiners part article that provides a Mpower combiners The transmission-line transformers and textbook-style review of an or dividers, impedance combiners can provide very wide operating important group of RF transformers and direc- bandwidths and operate up to frequencies of 3 circuits used in applications tional couplers. In the GHz and higher [1, 2]. They are widely used in such as power amplifiers, case of combiners, it is matching networks for antennas and power antenna systems and critical, particularly at amplifiers in the HF and VHF bands, in mixer measurement systems higher frequencies, that circuits, and their low losses make them espe- the correct types are used cially useful in high power circuits [3, 4]. to achieve the desired power performance Typical structures for transmission-line trans- when combing individual active devices to formers consist of parallel wires, coaxial achieve higher power. cables or bifilar twisted wire pairs. In the lat- The methods for configuration of the com- ter case, the characteristic impedance can eas- biners or dividers differ, depending on the ily be determined by the wire diameter, the operating frequency, frequency bandwidth, insulation thickness, and, to some extent, the output power, and size requirements. Coaxial twisting pitch [5, 6]. For coaxial cable trans- cable combiners with ferrite cores are often formers with correctly chosen characteristic used to combine the output powers of power impedance, the theoretical high frequency amplifiers intended for wideband applica- bandwidth limit is reached when the cable tions.