Active Reduction of Residual Amplitude Modulation in Free Space Eoms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bias Circuits for RF Devices
Bias Circuits for RF Devices Iulian Rosu, YO3DAC / VA3IUL, http://www.qsl.net/va3iul A lot of RF schematics mention: “bias circuit not shown”; when actually one of the most critical yet often overlooked aspects in any RF circuit design is the bias network. The bias network determines the amplifier performance over temperature as well as RF drive. The DC bias condition of the RF transistors is usually established independently of the RF design. Power efficiency, stability, noise, thermal runway, and ease to use are the main concerns when selecting a bias configuration. A transistor amplifier must possess a DC biasing circuit for a couple of reasons. • We would require two separate voltage supplies to furnish the desired class of bias for both the emitter-collector and the emitter-base voltages. • This is in fact still done in certain applications, but biasing was invented so that these separate voltages could be obtained from but a single supply. • Transistors are remarkably temperature sensitive, inviting a condition called thermal runaway. Thermal runaway will rapidly destroy a bipolar transistor, as collector current quickly and uncontrollably increases to damaging levels as the temperature rises, unless the amplifier is temperature stabilized to nullify this effect. Amplifier Bias Classes of Operation Special classes of amplifier bias levels are utilized to achieve different objectives, each with its own distinct advantages and disadvantages. The most prevalent classes of bias operation are Class A, AB, B, and C. All of these classes use circuit components to bias the transistor at a different DC operating current, or “ICQ”. When a BJT does not have an A.C. -

Adapting Techniques to Improve Efficiency in Radio Frequency
electronics Article Adapting Techniques to Improve Efficiency in Radio Frequency Power Amplifiers for Visible Light Communications Daniel G. Aller 1,* , Diego G. Lamar 1, Juan Rodriguez 2, Pablo F. Miaja 1 , Valentin Francisco Romero 3, Jose Mendiolagoitia 3 and Javier Sebastian 1 1 Power Supplies Group—Electrical Engineering Department of the University of Oviedo, 33204 Gijon, Spain; [email protected] (D.G.L.); [email protected] (P.F.M.); [email protected] (J.S.) 2 Center for Industrial Electronics—Polytechnic University of Madrid, 28006 Madrid, Spain; [email protected] 3 Thyssenkrupp Elevator Innovation Center S A U—Thyssenkrupp AG, 33203 Gijon, Spain; [email protected] (V.F.R.); [email protected] (J.M.) * Correspondence: [email protected]; Tel.: +34-985-182-578 Received: 30 November 2019; Accepted: 3 January 2020; Published: 10 January 2020 Abstract: It is well known that modern wireless communications systems need linear, wide bandwidth, efficient Radio Frequency Power Amplifiers (RFPAs). However, conventional configurations of RFPAs based on Class A, Class B, and Class AB exhibit extremely low efficiencies when they manage signals with a high Peak-to-Average Power Ratio (PAPR). Traditionally, a number of techniques have been proposed either to achieve linearity in the case of efficient Switching-Mode RFPAs or to improve the efficiency of linear RFPAs. There are two categories in the application of aforementioned techniques. First, techniques based on the use of Switching-Mode DC–DC converters with a very-fast-output response (faster than 1 µs). Second, techniques based on the interaction of several RFPAs. The current expansion of these techniques is mainly due to their application in cellphone networks, but they can also be applied in other promising wireless communications systems such as Visible Light Communication (VLC). -

AN-937 Designing Amplifier Circuits
AN-937 APPLICATION NOTE One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com Designing Amplifier Circuits: How to Avoid Common Problems by Charles Kitchin INTRODUCTION down toward the negative supply. The bias voltage is amplified When compared to assemblies of discrete semiconductors, by the closed-loop dc gain of the amplifier. modern operational amplifiers (op amps) and instrumenta- This process can be lengthy. For example, an amplifier with a tion amplifiers (in-amps) provide great benefits to designers. field effect transistor (FET) input, having a 1 pA bias current, Although there are many published articles on circuit coupled via a 0.1-μF capacitor, has an IC charging rate, I/C, of applications, all too often, in the haste to assemble a circuit, 10–12/10–7 = 10 μV per sec basic issues are overlooked leading to a circuit that does not function as expected. This application note discusses the most or 600 μV per minute. If the gain is 100, the output drifts at common design problems and offers practical solutions. 0.06 V per minute. Therefore, a casual lab test, using an ac- coupled scope, may not detect this problem, and the circuit MISSING DC BIAS CURRENT RETURN PATH may not fail until hours later. It is important to avoid this One of the most common application problems encountered is problem altogether. the failure to provide a dc return path for bias current in ac- +VS coupled op amp or in-amp circuits. -

Multi-Frequency Modulation and Control for DC/AC and AC/DC Resonant Converters
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Doctoral Dissertations Graduate School 12-2018 Multi-Frequency Modulation and Control for DC/AC and AC/DC Resonant Converters Chongwen Zhao University of Tennessee, [email protected] Follow this and additional works at: https://trace.tennessee.edu/utk_graddiss Recommended Citation Zhao, Chongwen, "Multi-Frequency Modulation and Control for DC/AC and AC/DC Resonant Converters. " PhD diss., University of Tennessee, 2018. https://trace.tennessee.edu/utk_graddiss/5269 This Dissertation is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Doctoral Dissertations by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a dissertation written by Chongwen Zhao entitled "Multi-Frequency Modulation and Control for DC/AC and AC/DC Resonant Converters." I have examined the final electronic copy of this dissertation for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Doctor of Philosophy, with a major in Electrical Engineering. Daniel Costinett, Major Professor We have read this dissertation and recommend its acceptance: Fred Wang, Leon M. Tolbert, D. Caleb Rucker Accepted for the Council: Dixie L. Thompson Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) Multi-Frequency Modulation and Control for DC/AC and AC/DC Resonant Converters A Dissertation Presented for the Doctor of Philosophy Degree University of Tennessee, Knoxville Chongwen Zhao December 2018 To my parents To Junting Guo ii Acknowledgement I would like to acknowledge the support and guidance from faculty members and staff at the University of Tennessee. -
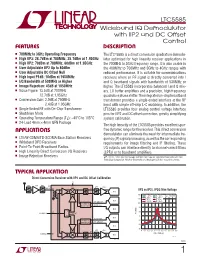
Wideband IQ Demodulator with IIP2 and DC Offset Control
LTC5585 Wideband IQ Demodulator with IIP2 and DC Offset Control FEATURES DESCRIPTION n 700MHz to 3GHz Operating Frequency The LTC®5585 is a direct conversion quadrature demodu- n High IIP3: 28.7dBm at 700MHz, 25.7dBm at 1.95GHz lator optimized for high linearity receiver applications in n High IIP2: 70dBm at 700MHz, 60dBm at 1.95GHz the 700MHz to 3GHz frequency range. It is also usable in n User Adjustable IIP2 Up to 80dBm the 400MHz to 700MHz and 3GHz to 4GHz ranges with n User Adjustable DC Offset Null reduced performance. It is suitable for communications n High Input P1dB: 16dBm at 1950MHz receivers where an RF signal is directly converted into I n I/Q Bandwidth of 530MHz or Higher and Q baseband signals with bandwidth of 530MHz or n Image Rejection: 43dB at 1950MHz higher. The LTC5585 incorporates balanced I and Q mix- n Noise Figure: 13.5dB at 700MHz ers, LO buffer amplifiers and a precision, high frequency 12.7dB at 1.95GHz quadrature phase shifter. The integrated on-chip broadband n Conversion Gain: 2.0dB at 700MHz transformer provides a single-ended interface at the RF 2.4dB at 1.95GHz input with simple off-chip L-C matching. In addition, the n Single-Ended RF with On-Chip Transformer LTC5585 provides four analog control voltage interface n Shutdown Mode pins for IIP2 and DC offset correction, greatly simplifying n Operating Temperature Range (TC): –40°C to 105°C system calibration. n 24-Lead 4mm × 4mm QFN Package The high linearity of the LTC5585 provides excellent spur- APPLICATIONS free dynamic range for the receiver. -

Dynamic Power Supply Design for High-Efficiency Wireless Transmitters
Dynamic Power Supply Design for High-Efficiency Wireless Transmitters Jason T. Stauth Seth R. Sanders Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2006-72 http://www.eecs.berkeley.edu/Pubs/TechRpts/2006/EECS-2006-72.html May 19, 2006 Copyright © 2006, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Dynamic Power Supply Design for High-Efficiency Wireless Transmitters by Jason T. Stauth Masters Research Project Submitted to the Department of Electrical Engineering and Computer Sciences, University of California at Berkeley, in partial satisfaction of the requirements for the degree of Master of Science, Plan II. Approval for the Report and Comprehensive Examination: Committee: Professor Seth R. Sanders Research Advisor (Date) * * * * * * * Professor Ali M. Niknejad Second Reader (Date) Table of Contents Chapter 1 Introduction..................................................................................................... 6 1.1.1 Overview..................................................................................................... 7 1.1.2 Previous Work ........................................................................................... -

Time-Frequency Analysis of DC Bias Vibration of Transformer Core on The
INGENIERÍA E INVESTIGACIÓN VOL. 36 N.° 1, APRIL - 2016 (90-97) DOI: http://dx.doi.org/10.15446/ing.investig.v36n1.51580 Time-frequency analysis of DC bias vibration of transformer core on the basis of Hilbert–Huang transform Análisis de tiempo y frecuencia de vibración de polarización DC del núcleo del transformador sobre la base de Hilbert-Transform Huang X.M. Liu1, Y.M. Yang2, F. Yang3, and Q.Y. Shi4 ABSTRACT This paper presents a time–frequency analysis of the vibration of transformer under direct current (DC) bias through Hilbert–Huang transform (HHT). First, the theory of DC bias for the transformer was analyzed. Next, the empirical mode decomposition (EMD) process, which is the key in HHT, was introduced. The results of EMD, namely, intrinsic mode functions (IMFs), were calculated and summed by Hilbert transform(HT) to obtain time-dependent series in a 2D time–frequency domain. Lastly, a test system of vibration measurement for the transformer was set up. Three direction (x, y, and z axes) components of core vibration were measured. Decomposition of EMD and HHT spectra showed that vibration strength increased, and odd harmonics were produced with DC bias. Results indicated that HHT is a viable signal processing tool for transformer health monitoring. Keywords: DC bias, transformer, vibration, HHT. RESUMEN En este trabajo se presenta un análisis tiempo-frecuencia de la vibración del transformador bajo polarización de corriente continua (CC) a través de transformación Hilbert-Huang (HHT). En primer lugar, se analizó la teoría de la DC de polarización para el transformador. A continuación, el proceso de descomposición de modo empírico (EMD), que es la clave en HHT, se introdujo. -

The Effect of DC Current on Power Transformers
University of Southern Queensland Faculty of Engineering and Surveying The Effect of DC Current on Power Transformers A dissertation submitted by Ashley Karl Zeimer in fulfilment of the requirements of Courses ENG4111 and 4112 Research Project towards the degree of Bachelor of Electrical/Electronic Engineering Submitted: October, 2000 Abstract Power transformers are an integral part of almost all electrical transmission and distribution networks. Their reliable service is of the utmost importance in modern society which is dependent on a constant electricity supply. There are a range of factors that can hinder the operation of a power transformer. This dissertation presents the results of investigations into one of these factors through an analysis of the effect that direct current has on the operational characteristics of a power transformer. There are a host of adverse effects that can accompany the presence of a direct current in a transformer’s windings. The predominant effect that is witnessed is half cycle saturation. This leads to increased harmonic distortion, increased reactive power losses, overheating and elevated acoustic noise emissions. Direct current can be found in a transformer’s windings as a result of imperfections in connected equipment and also due to magnetic disturbances of the earth’s field. Tests conducted indicate that personal computers are a potentially significant source of DC when a large number of units are connected to a common point of coupling. Similarly the possibility exists for AC and DC induction motor drives to contribute sizeable quantities of DC Bias. Page i University of Southern Queensland Faculty of Engineering and Surveying ENG4111 & ENG4112 Research Project Limitations of Use The Council of the University of Southern Queensland, its Faculty of Engineering and Surveying, and the staff of the University of Southern Queensland, do not accept any responsibility for the truth, accuracy or completeness of material contained within or associated with this dissertation. -
Capacitive Coupling Ethernet Transceivers Without Using Transformers
ANLAN120 Capacitive Coupling Ethernet Transceivers without Using Transformers Introduction It is a common practice to capacitive couple Ethernet transceivers (PHYs) together without the use of a transformer to reduce both the BOM cost and PCB area. This application note describes methods for capacitive coupling of Micrel’s 10/100 Ethernet devices. External Termination Ethernet Devices The Ethernet devices in Table 1 require external termination resistors. They require external biasing or internal biasing. Table 1. Micrel Devices with External Termination External Biasing and External Termination Ethernet Device KSZ8695 Family CENTAUR – SoC KSZ8721 Family Single Port 10/100 PHY KSZ8001 Family Single Port 10/100 PHY KSZ8041 Family Single Port 10/100 PHY KSZ8841 Family Single Port 10/100 MAC Controller KSZ8842 Family 2-Port 10/100 Switch KSZ8893 Family 3-Port 10/100 Switch KSZ8873 Family 3-Port 10/100 Switch KSZ8863 Family 3-Port 10/100 Switch KSZ8851 Family Single Port 10/100 MAC Controller KSZ8995 Family 5-Port 10/100 Switch KSZ8997 8-Port 10/100 Unmanaged Switch KSZ8999 9-Port 10/100 Unmanaged Switch Internal Biasing and external termination Ethernet Device KSZ8993 family 3-Port 10/100 Switch Micrel Inc. • 2180 Fortune Drive • San Jose, CA 95131 • USA • tel +1 (408) 944-0800 • fax + 1 (408) 474-1000 • http://www.micrel.com November 21, 2014 Revision 3.0 Micrel, Inc. ANLAN120 − Capacitive Coupling Ethernet Transceivers without Using Transformers Methods for Capacitive Coupling The method for capacitive coupling depends upon whether or not the receiver circuit provides an internal DC bias offset. Transmit Termination Figure 1 and Figure 2 show the capacitive coupling for transmit-side termination. -

Design of Analog Baseband Circuits for Wireless Communication Receivers
Design of Analog Baseband Circuits for Wireless Communication Receivers DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Seoung Jae Yoo, B.S., M.S. ***** The Ohio State University 2004 Dissertation Committee: Approved by Mohammed Ismail ElNaggar, Adviser Joanne E. DeGroat Adviser Furrukh Khan Department of Electrical Engineering c Copyright by Seoung Jae Yoo 2004 ABSTRACT This dissertation describes the design and implementation of analog baseband filter and variable gain amplifiers (VGA) for wireless communication receivers. Since discrete high-Q image rejection and IF filters are eliminated, fully integrated receiver architecture demands baseband filters and VGAs which exhibit high linearity and wide dynamic range. In this dissertation, baseband chains for WLAN receivers and base station application, and low voltage transresistance based filter and VGA are presented. For WLAN receiver, three different baseband chains are introduced in chapter 3. First baseband chain is designed based on the feed forward compensated amplifier. Since the amplifier demonstrates high gain bandwidth and phase margin, the opera- tion of filter is not affected by phase error and finite gain bandwidth of the amplifier. The feedforward compensated amplifier based filter and VGA are fabricated in 0.5µ CMOS technology and measured. Second baseband chain is designed based on fully differential buffer. The fully differential buffer shows the characteristics such as wide bandwidth, low output impedance, and high linearity, which are required in the design of wideband filter. Since identical buffer circuits are applied for the design of filter and VGA, design and optimization time are saved. -

Tubes, Discrete Solid State Devices, and Integrated Circuits 99
Tubes, Discrete Solid State Devices, and Integrated Circuits 99 12.1 Tubes Filament Cathode Grid In 1883, Edison discovered that electrons flowed in an Beam Eye-tube evacuated lamp bulb from a heated filament to a sepa- Plate forming deflection rate electrode (the Edison effect). Fleming, making use plates plate of this principle, invented the Fleming Valve in 1905, but when DeForest, in 1907, inserted the grid, he Photo Cold Gas cathode opened the door to electronic amplification with the cathode filled Audion. The millions of vacuum tubes are an outgrowth Figure 12-1. Tube elements and their designation. of the principles set forth by these men.1 It was thought that with the invention of the tran- 12.1.2 Tube Types sistor and integrated circuits, that the tube would disap- pear from audio circuits. This has hardly been the case. There are many types of tubes, each used for a partic- Recently tubes have had a revival because some golden ular purpose. All tubes require a type of heater to permit ears like the smoothness and nature of the tube sound. the electrons to flow. Table12-2 defines the various The 1946 vintage 12AX7 is not dead and is still used types of tubes. today as are miniature tubes in condenser microphones and 6L6s in power amplifiers. It is interesting that many Table 12-2. The Eight Types of Vacuum Tubes feel that a 50 W tube amplifier sounds better than a diode A two-element tube consisting of a plate and a cath- 250 W solid state amplifier. -

Am/Fm Radio Kit
AM/FM RADIO KIT MODEL AM/FM-108CK SUPERHET RADIO CONTAINS TWO SEPARATE AUDIO SYSTEMS: IC AND TRANSISTOR Assembly and Instruction Manual ELENCO® Copyright © 2012 by ELENCO® All rights reserved. 753510 No part of this book shall be reproduced by any means; electronic, photocopying, or otherwise without written permission from the publisher. The AM/FM Radio project is divided into two parts, the AM Radio Section and the FM Radio Section. At this time, only identify the parts that you will need for the AM radio as listed below. DO NOT OPEN the bags listed for the FM radio. A separate parts list will be shown for the FM radio after you have completed the AM radio. PARTS LIST FOR THE AM RADIO SECTION If you are a student, and any parts are missing or damaged, please see instructor or bookstore. If you purchased this kit from a distributor, catalog, etc., please contact ELENCO® (address/phone/e-mail is at the back of this manual) for additional assistance, if needed. DO NOT contact your place of purchase as they will not be able to help you. RESISTORS Qty. Symbol Value Color Code Part # r 1 R45 10Ω 5% 1/4W brown-black-black-gold 121000 r 2 R44, 48 47Ω 5% 1/4W yellow-violet-black-gold 124700 r 4 R38, 43, 50, 51 100Ω 5% 1/4W brown-black-brown-gold 131000 r 1 R49 330Ω 5% 1/4W orange-orange-brown-gold 133300 r 1 R41 470Ω 5% 1/4W yellow-violet-brown-gold 134700 r 1 R37 1kΩ 5% 1/4W brown-black-red-gold 141000 r 1 R42 2.2kΩ 5% 1/4W red-red-red-gold 142200 r 3 R33, 36, 46 3.3kΩ 5% 1/4W orange-orange-red-gold 143300 r 1 R40 10kΩ 5% 1/4W brown-black-orange-gold 151000 r 1 R32 12kΩ 5% 1/4W brown-red-orange-gold 151200 r 1 R35 27kΩ 5% 1/4W red-violet-orange-gold 152700 r 1 R39 39kΩ 5% 1/4W orange-white-orange-gold 153900 r 1 R31 56kΩ 5% 1/4W green-blue-orange-gold 155600 r 1 R47 470kΩ 5% 1/4W yellow-violet-yellow-gold 164700 r 1 R34 1MΩ 5% 1/4W brown-black-green-gold 171000 r 1 Volume/S2 50kΩ / SW Potentiometer / switch with nut and plastic washer 192522 CAPACITORS Qty.