Freac Cache: Folded-Logic Reconfigurable Computing in The
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Data Storage the CPU-Memory
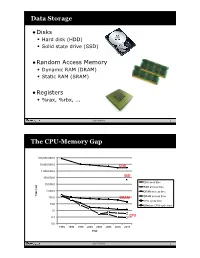
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -

Reconfigurable Computing
Reconfigurable Computing: A Survey of Systems and Software KATHERINE COMPTON Northwestern University AND SCOTT HAUCK University of Washington Due to its potential to greatly accelerate a wide variety of applications, reconfigurable computing has become a subject of a great deal of research. Its key feature is the ability to perform computations in hardware to increase performance, while retaining much of the flexibility of a software solution. In this survey, we explore the hardware aspects of reconfigurable computing machines, from single chip architectures to multi-chip systems, including internal structures and external coupling. We also focus on the software that targets these machines, such as compilation tools that map high-level algorithms directly to the reconfigurable substrate. Finally, we consider the issues involved in run-time reconfigurable systems, which reuse the configurable hardware during program execution. Categories and Subject Descriptors: A.1 [Introductory and Survey]; B.6.1 [Logic Design]: Design Style—logic arrays; B.6.3 [Logic Design]: Design Aids; B.7.1 [Integrated Circuits]: Types and Design Styles—gate arrays General Terms: Design, Performance Additional Key Words and Phrases: Automatic design, field-programmable, FPGA, manual design, reconfigurable architectures, reconfigurable computing, reconfigurable systems 1. INTRODUCTION of algorithms. The first is to use hard- wired technology, either an Application There are two primary methods in con- Specific Integrated Circuit (ASIC) or a ventional computing for the execution group of individual components forming a This research was supported in part by Motorola, Inc., DARPA, and NSF. K. Compton was supported by an NSF fellowship. S. Hauck was supported in part by an NSF CAREER award and a Sloan Research Fellowship. -

Syllabus: EEL4930/5934 Reconfigurable Computing
EEL4720/5721 Reconfigurable Computing (dual-listed course) Department of Electrical and Computer Engineering University of Florida Spring Semester 2019 Catalog Description: Prereq: EEL4712C or EEL5764 or consent of instructor. Fundamental concepts at advanced undergraduate level (EEL4720) and introductory graduate level (EEL5721) in reconfigurable computing (RC) based upon advanced technologies in field-programmable logic devices. Topics include general RC concepts, device architectures, design tools, metrics and kernels, system architectures, and application case studies. Credit Hours: 3 Prerequisites by Topic: Fundamentals of digital design including device technologies, design methodology and techniques, and design environments and tools; fundamentals of computer organization and architecture, including datapath and control structures, data formats, instruction-set principles, pipelining, instruction-level parallelism, memory hierarchy, and interconnects and interfacing. Instructor: Dr. Herman Lam Office: Benton Hall, Room 313 Office hours: TBA Telephone: (352) 392-2689 Email: [email protected] Teaching Assistant: Seyed Hashemi Office hours: TBA Email: [email protected] Class lectures: MWF 4th period, Larsen Hall 239 Required textbook: none References: . Reconfigurable Computing: The Theory and Practice of FPGA-Based Computation, edited by Scott Hauck and Andre DeHon, Elsevier, Inc. (Morgan Kaufmann Publishers), Amsterdam, 2008. ISBN: 978-0-12-370522-8 . C. Maxfield, The Design Warrior's Guide to FPGAs, Newnes, 2004, ISBN: 978-0750676045. -

A MATLAB Compiler for Distributed, Heterogeneous, Reconfigurable
A MATLAB Compiler For Distributed, Heterogeneous, Reconfigurable Computing Systems P. Banerjee, N. Shenoy, A. Choudhary, S. Hauck, C. Bachmann, M. Haldar, P. Joisha, A. Jones, A. Kanhare A. Nayak, S. Periyacheri, M. Walkden, D. Zaretsky Electrical and Computer Engineering Northwestern University 2145 Sheridan Road Evanston, IL-60208 [email protected] Abstract capabilities and are coordinated to perform an application whose subtasks have diverse execution requirements. One Recently, high-level languages such as MATLAB have can visualize such systems to consist of embedded proces- become popular in prototyping algorithms in domains such sors, digital signal processors, specialized chips, and field- as signal and image processing. Many of these applications programmable gate arrays (FPGA) interconnected through whose subtasks have diverse execution requirements, often a high-speed interconnection network; several such systems employ distributed, heterogeneous, reconfigurable systems. have been described in [9]. These systems consist of an interconnected set of heteroge- A key question that needs to be addressed is how to map neous processing resources that provide a variety of archi- a given computation on such a heterogeneous architecture tectural capabilities. The objective of the MATCH (MATlab without expecting the application programmer to get into Compiler for Heterogeneous computing systems) compiler the low level details of the architecture or forcing him/her to project at Northwestern University is to make it easier for understand -

Cache-Aware Roofline Model: Upgrading the Loft
1 Cache-aware Roofline model: Upgrading the loft Aleksandar Ilic, Frederico Pratas, and Leonel Sousa INESC-ID/IST, Technical University of Lisbon, Portugal ilic,fcpp,las @inesc-id.pt f g Abstract—The Roofline model graphically represents the attainable upper bound performance of a computer architecture. This paper analyzes the original Roofline model and proposes a novel approach to provide a more insightful performance modeling of modern architectures by introducing cache-awareness, thus significantly improving the guidelines for application optimization. The proposed model was experimentally verified for different architectures by taking advantage of built-in hardware counters with a curve fitness above 90%. Index Terms—Multicore computer architectures, Performance modeling, Application optimization F 1 INTRODUCTION in Tab. 1. The horizontal part of the Roofline model cor- Driven by the increasing complexity of modern applica- responds to the compute bound region where the Fp can tions, microprocessors provide a huge diversity of compu- be achieved. The slanted part of the model represents the tational characteristics and capabilities. While this diversity memory bound region where the performance is limited is important to fulfill the existing computational needs, it by BD. The ridge point, where the two lines meet, marks imposes challenges to fully exploit architectures’ potential. the minimum I required to achieve Fp. In general, the A model that provides insights into the system performance original Roofline modeling concept [10] ties the Fp and the capabilities is a valuable tool to assist in the development theoretical bandwidth of a single memory level, with the I and optimization of applications and future architectures. -
ARM-Architecture Simulator Archulator
Embedded ECE Lab Arm Architecture Simulator University of Arizona ARM-Architecture Simulator Archulator Contents Purpose ............................................................................................................................................ 2 Description ...................................................................................................................................... 2 Block Diagram ............................................................................................................................ 2 Component Description .............................................................................................................. 3 Buses ..................................................................................................................................................... 3 µP .......................................................................................................................................................... 3 Caches ................................................................................................................................................... 3 Memory ................................................................................................................................................. 3 CoProcessor .......................................................................................................................................... 3 Using the Archulator ...................................................................................................................... -

Architecture and Programming Model Support for Reconfigurable Accelerators in Multi-Core Embedded Systems »
THESE DE DOCTORAT DE L’UNIVERSITÉ BRETAGNE SUD COMUE UNIVERSITE BRETAGNE LOIRE ÉCOLE DOCTORALE N° 601 Mathématiques et Sciences et Technologies de l'Information et de la Communication Spécialité : Électronique Par « Satyajit DAS » « Architecture and Programming Model Support For Reconfigurable Accelerators in Multi-Core Embedded Systems » Thèse présentée et soutenue à Lorient, le 4 juin 2018 Unité de recherche : Lab-STICC Thèse N° : 491 Rapporteurs avant soutenance : Composition du Jury : Michael HÜBNER Professeur, Ruhr-Universität François PÊCHEUX Professeur, Sorbonne Université Bochum Président (à préciser après la soutenance) Jari NURMI Professeur, Tampere University of Angeliki KRITIKAKOU Maître de conférences, Université Technology Rennes 1 Davide ROSSI Assistant professor, Université de Bologna Kevin MARTIN Maître de conférences, Université Bretagne Sud Directeur de thèse Philippe COUSSY Professeur, Université Bretagne Sud Co-directeur de thèse Luca BENINI Professeur, Université de Bologna Architecture and Programming Model Support for Reconfigurable Accelerators in Multi-Core Embedded Systems Satyajit Das 2018 iii ABSTRACT Emerging trends in embedded systems and applications need high throughput and low power consumption. Due to the increasing demand for low power computing, and diminishing returns from technology scaling, industry and academia are turning with renewed interest toward energy efficient hardware accelerators. The main drawback of hardware accelerators is that they are not programmable. Therefore, their utilization can be low as they perform one specific function and increasing the number of the accelerators in a system onchip (SoC) causes scalability issues. Programmable accelerators provide flexibility and solve the scalability issues. Coarse-Grained Reconfigurable Array (CGRA) architecture consisting several processing elements with word level granularity is a promising choice for programmable accelerator. -

Multi-Tier Caching Technology™
Multi-Tier Caching Technology™ Technology Paper Authored by: How Layering an Application’s Cache Improves Performance Modern data storage needs go far beyond just computing. From creative professional environments to desktop systems, Seagate provides solutions for almost any application that requires large volumes of storage. As a leader in NAND, hybrid, SMR and conventional magnetic recording technologies, Seagate® applies different levels of caching and media optimization to benefit performance and capacity. Multi-Tier Caching (MTC) Technology brings the highest performance and areal density to a multitude of applications. Each Seagate product is uniquely tailored to meet the performance requirements of a specific use case with the right memory, NAND, and media type and size. This paper explains how MTC Technology works to optimize hard drive performance. MTC Technology: Key Advantages Capacity requirements can vary greatly from business to business. While the fastest performance can be achieved using Dynamic Random Access Memory (DRAM) cache, the data in the DRAM is not persistent through power cycles and DRAM is very expensive compared to other media. NAND flash data survives through power cycles but it is still very expensive compared to a magnetic storage medium. Magnetic storage media cache offers good performance at a very low cost. On the downside, media cache takes away overall disk drive capacity from PMR or SMR main store media. MTC Technology solves this dilemma by using these diverse media components in combination to offer different levels of performance and capacity at varying price points. By carefully tuning firmware with appropriate cache types and sizes, the end user can experience excellent overall system performance. -
Hardware Platforms for Embedded Computing Graphics: © Alexandra Nolte, Gesine Marwedel, 2003 Universität Dortmund Importance of Energy Efficiency
Universität Dortmund Hardware Platforms for Embedded Computing Graphics: © Alexandra Nolte, Gesine Marwedel, 2003 Universität Dortmund Importance of Energy Efficiency Efficient software design needed, otherwise, the price for software flexibility cannot be paid. © Hugo De Man (IMEC) Philips, 2007 Universität Dortmund Embedded vs. general-purpose processors • Embedded processors may be optimized for a category of applications. – Customization may be narrow or broad. • We may judge embedded processors using different metrics: – Code size. – Memory system performance. – Preditability. • Disappearing distinction: embedded processors everywhere Universität Dortmund Microcontroller Architectures Memory 0 Address Bus Program + CPU Data Bus Data Von Neumann 2n Architecture Memory 0 Address Bus Program CPU Fetch Bus Harvard Address Bus 0 Architecture Data Bus Data Universität Dortmund RISC processors • RISC generally means highly-pipelinable, one instruction per cycle. • Pipelines of embedded RISC processors have grown over time: – ARM7 has 3-stage pipeline. – ARM9 has 5-stage pipeline. – ARM11 has eight-stage pipeline. ARM11 pipeline [ARM05]. Universität Dortmund ARM Cortex Based on ARMv7 Architecture & Thumb®-2 ISA – ARM Cortex A Series - Applications CPUs focused on the execution of complex OS and user applications • First Product: Cortex-A8 • Executes ARM, Thumb-2 instructions – ARM Cortex R Series - Deeply embedded processors focused on Real-time environments • First Product: Cortex-R4(F) • Executes ARM, Thumb-2 instructions – ARM Cortex M -

CUDA 11 and A100 - WHAT’S NEW? Markus Hrywniak, 23Rd June 2020 TOPICS for TODAY
CUDA 11 AND A100 - WHAT’S NEW? Markus Hrywniak, 23rd June 2020 TOPICS FOR TODAY Ampere architecture – A100, powering DGX–A100, HGX-A100... and soon, FZ Jülich‘s JUWELS Booster New CUDA 11 Toolkit release Overview of features Talk next week: Third generation Tensor Cores GTC talks go into much more details. See references! 2 HGX-A100 4-GPU HGX-A100 8-GPU • 4 A100 with NVLINK • 8 A100 with NVSwitch 3 HIERARCHY OF SCALES Multi-System Rack Multi-GPU System Multi-SM GPU Multi-Core SM Unlimited Scale 8 GPUs 108 Multiprocessors 2048 threads 4 AMDAHL’S LAW serial section parallel section serial section Amdahl’s Law parallel section Shortest possible runtime is sum of serial section times Time saved serial section Some Parallelism Increased Parallelism Infinite Parallelism Program time = Parallel sections take less time Parallel sections take no time sum(serial times + parallel times) Serial sections take same time Serial sections take same time 5 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY serial section parallel section serial section Split up serial & parallel components parallel section serial section Some Parallelism Task Parallelism Infinite Parallelism Program time = Parallel sections overlap with serial sections Parallel sections take no time sum(serial times + parallel times) Serial sections take same time 6 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY CUDA Concurrency Mechanisms At Every Scope CUDA Kernel Threads, Warps, Blocks, Barriers Application CUDA Streams, CUDA Graphs Node Multi-Process Service, GPU-Direct System NCCL, CUDA-Aware MPI, NVSHMEM 7 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY Execution Overheads Non-productive latencies (waste) Operation Latency Network latencies Memory read/write File I/O .. -

Reconfigurable Computing
Reconfigurable Computing David Boland1, Chung-Kuan Cheng2, Andrew B. Kahng2, Philip H.W. Leong1 1School of Electrical and Information Engineering, The University of Sydney, Australia 2006 2Dept. of Computer Science and Engineering, University of California, La Jolla, California Abstract: Reconfigurable computing is the application of adaptable fabrics to solve computational problems, often taking advantage of the flexibility available to produce problem-specific architectures that achieve high performance because of customization. Reconfigurable computing has been successfully applied to fields as diverse as digital signal processing, cryptography, bioinformatics, logic emulation, CAD tool acceleration, scientific computing, and rapid prototyping. Although Estrin-first proposed the idea of a reconfigurable system in the form of a fixed plus variable structure computer in 1960 [1] it has only been in recent years that reconfigurable fabrics, in the form of field-programmable gate arrays (FPGAs), have reached sufficient density to make them a compelling implementation platform for high performance applications and embedded systems. In this article, intended for the non-specialist, we describe some of the basic concepts, tools and architectures associated with reconfigurable computing. Keywords: reconfigurable computing; adaptable fabrics; application integrated circuits; field programmable gate arrays (FPGAs); system architecture; runtime 1 Introduction Although reconfigurable fabrics can in principle be constructed from any type of technology, in practice, most contemporary designs are made using commercial field programmable gate arrays (FPGAs). An FPGA is an integrated circuit containing an array of logic gates in which the connections can be configured by downloading a bitstream to its memory. FPGAs can also be embedded in integrated circuits as intellectual property cores. -

A Characterization of Processor Performance in the VAX-1 L/780
A Characterization of Processor Performance in the VAX-1 l/780 Joel S. Emer Douglas W. Clark Digital Equipment Corp. Digital Equipment Corp. 77 Reed Road 295 Foster Street Hudson, MA 01749 Littleton, MA 01460 ABSTRACT effect of many architectural and implementation features. This paper reports the results of a study of VAX- llR80 processor performance using a novel hardware Prior related work includes studies of opcode monitoring technique. A micro-PC histogram frequency and other features of instruction- monitor was buiit for these measurements. It kee s a processing [lo. 11,15,161; some studies report timing count of the number of microcode cycles execute z( at Information as well [l, 4,121. each microcode location. Measurement ex eriments were performed on live timesharing wor i loads as After describing our methods and workloads in well as on synthetic workloads of several types. The Section 2, we will re ort the frequencies of various histogram counts allow the calculation of the processor events in 5 ections 3 and 4. Section 5 frequency of various architectural events, such as the resents the complete, detailed timing results, and frequency of different types of opcodes and operand !!Iection 6 concludes the paper. specifiers, as well as the frequency of some im lementation-s ecific events, such as translation bu h er misses. ?phe measurement technique also yields the amount of processing time spent, in various 2. DEFINITIONS AND METHODS activities, such as ordinary microcode computation, memory management, and processor stalls of 2.1 VAX-l l/780 Structure different kinds. This paper reports in detail the amount of time the “average’ VAX instruction The llf780 processor is composed of two major spends in these activities.