Design and Implementation of a Belted Alternator Starter System for the OSU Ecocar 3 Vehicle THESIS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Engine Components and Filters: Damage Profiles, Probable Causes and Prevention
ENGINE COMPONENTS AND FILTERS: DAMAGE PROFILES, PROBABLE CAUSES AND PREVENTION Technical Information AFTERMARKET Contents 1 Introduction 5 2 General topics 6 2.1 Engine wear caused by contamination 6 2.2 Fuel flooding 8 2.3 Hydraulic lock 10 2.4 Increased oil consumption 12 3 Top of the piston and piston ring belt 14 3.1 Hole burned through the top of the piston in gasoline and diesel engines 14 3.2 Melting at the top of the piston and the top land of a gasoline engine 16 3.3 Melting at the top of the piston and the top land of a diesel engine 18 3.4 Broken piston ring lands 20 3.5 Valve impacts at the top of the piston and piston hammering at the cylinder head 22 3.6 Cracks in the top of the piston 24 4 Piston skirt 26 4.1 Piston seizure on the thrust and opposite side (piston skirt area only) 26 4.2 Piston seizure on one side of the piston skirt 27 4.3 Diagonal piston seizure next to the pin bore 28 4.4 Asymmetrical wear pattern on the piston skirt 30 4.5 Piston seizure in the lower piston skirt area only 31 4.6 Heavy wear at the piston skirt with a rough, matte surface 32 4.7 Wear marks on one side of the piston skirt 33 5 Support – piston pin bushing 34 5.1 Seizure in the pin bore 34 5.2 Cratered piston wall in the pin boss area 35 6 Piston rings 36 6.1 Piston rings with burn marks and seizure marks on the 36 piston skirt 6.2 Damage to the ring belt due to fractured piston rings 37 6.3 Heavy wear of the piston ring grooves and piston rings 38 6.4 Heavy radial wear of the piston rings 39 7 Cylinder liners 40 7.1 Pitting on the outer -
US2510669.Pdf
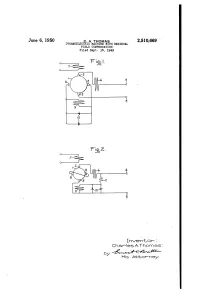
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Income? Bisone
INCOME? BISONE ED 179 392 SP 029 296 $ AUTHOR Hamilton, Howard B. TITLE Problem Manual for Power Processiug, Tart 1. Electric Machinery Analysis. ) ,INSTITUTION Pittsbutgh Univ., VA. 51'014 AGENCY National Science Foundation, Weeshingtcni D.C. PUB DATE -70 GRANT NSF-GY-4138 NOTE 40p.; For_related documents', see SE 029 295-298 EDRS PRICE MF01/BCO2 Plus Postage. DESCRIPTORS *College Science: Curriculum Develoimeft: Electricity: Electromechanical lacshnology;- Electfonics: *Engineering Educatiob: Higher Education: Instructional Materials: *Problem Solving; Science CourAes:,'Science Curriculum: Science . Eductttion; *Science Materials: Scientific Concepts AOSTRACT This publication was developed as aPortion/ofa . two-semester se4uence commencing t either the-sixth cr seVenth.term of the undergraduate program in electrical engineering at the University of Pittsburgh. The materials of tfie two courses, produced by' National Science Foundation grant, are concernedwitli power con ion systems comprising power electronic devices, electromechanical energy converters, and,associnted logic configurations necessary to cause the systlp to behave in a, prescrib,ed fashion. The erphasis in this portion of the'two course E` sequende (Part 1)is on electric machinery analysis.. 7his publication is-the problem manual for Part 1, which provide's problems included in 4, the first course. (HM) 4 Reproductions supplied by EDPS are the best that can be made from the original document. * **************************v******************************************** 2 -

Timing Belt Interference Caution Note: Camshaft
Carmax 6067 170 Turnpike Rd Westborough, MA 01581 YMMS: 1991 Chevrolet Lumina Z34 Sep 3, 2020 Engine: 3.4L Eng License: VIN: Odometer: TIMING BELT INTERFERENCE CAUTION NOTE: CAMSHAFT DRIVE BELTS OR TIMING BELTS - The condition of camshaft drive belts should always be checked on vehicles which have more than 50,000 miles. Although some manufacturers do not recommend replacement at a specified mileage, others require it at 60,000-100,000 miles. A camshaft drive belt failure may cause extensive damage to internal engine components on most engines, although some designs do not allow piston-to-valve contact. These designs are often called "Free Wheeling". Many manufacturers changed their maintenance and warranty schedules in the mid-1980's to reflect timing belt inspection and/or replacement at 50,000- 60,000 miles. Most service interval schedules shown in this section reflect these changes. Belts or components should be inspected and replaced if any of the following conditions exist: Crack Or Tears In Belt Surface Missing, Damaged, Cracked Or Rounded Teeth Oil Contamination Damaged Or Faulty Tensioners Incorrect Tension Adjustment REMOVAL & INSTALLATION Tip: Timing belt CAUTION: For 1996-97 models, this application is an interference engine. Do not rotate camshaft or crankshaft when timing belt is removed, or engine damage may occur. NOTE: The camshaft timing procedure has been updated by TSB bulletin No. 47-61-34, dated December, 1994. REMOVAL Tip: timing 3.4 x motor 1. Disconnect negative battery cable. Remove air cleaner and duct assembly. Drain engine coolant. 2. Remove accelerator and cruise control cables from throttle body. -
MGB Alternator Conversion Installation Instructions for MGA & 1962 to 1967 MGB PART# 130-078, 130-088, 130-098 440 Rutherford St
MGB Alternator Conversion Installation Instructions For MGA & 1962 to 1967 MGB PART# 130-078, 130-088, 130-098 440 Rutherford St. Goleta, CA 93117 1-800-642-8295 • FAX 805-692-2525 • www.MossMotors.com Scan the code to watch Moss's Generator to Alternator Conversion Video Or search “Moss TV generator to alternator conversion” on YouTube. Tools required: Vehicle Preparation: Positive Ground to Negative Ground Conversion • Small and medium flat blade screwdriver 1. Remove the battery cover behind the seats using a • Phillips head screwdriver screwdriver to release the dzus fasteners. Disconnect and remove the battery, or both batteries if still • 11/32" wrench, 7/16" wrench, 1/2" wrench, configured for a dual 6 volt set up, using a 1/2" 5/8" wrench wrench. • 7/16" socket with extension, 1/2" socket, 5/8" socket, 22mm socket 2. Disconnect the Yellow/Green and Yellow wires from the generator. If the generator uses ring type • Center punch connectors use a 5/16" and 7/16" wrench. • Hammer 3. For the installation of the Lucas alternator the ignition • 1/4" drill bit, electric drill coil will have to be relocated to the engine bay side • Deadblow hammer of the right fender well. Remove the coil from the generator using a 7/16" socket. Locate a new place • Air impact gun for the coil and mark the hole locations. Using a • Pry bar center punch and hammer, make two dimples at the center of the marks to insure that the drill bit will not • Wire cutters walk around when the holes are being started. -

The Starting System Includes the Battery, Starter Motor, Solenoid, Ignition Switch and in Some Cases, a Starter Relay
UNIT II STARTING SYSTEM &CHARGING SYSTEM The starting system: The starting system includes the battery, starter motor, solenoid, ignition switch and in some cases, a starter relay. An inhibitor or a neutral safety switch is included in the starting system circuit to prevent the vehicle from being started while in gear. When the ignition key is turned to the start position, current flows and energizes the starter's solenoid coil. The energized coil becomes an electromagnet which pulls the plunger into the coil. The plunger closes a set of contacts which allow high current to reach the starter motor. The charging system: The charging system consists of an alternator (generator), drive belt, battery, voltage regulator and the associated wiring. The charging system, like the starting system is a series circuit with the battery wired in parallel. After the engine is started and running, the alternator takes over as the source of power and the battery then becomes part of the load on the charging system. The alternator, which is driven by the belt, consists of a rotating coil of laminated wire called the rotor. Surrounding the rotor are more coils of laminated wire that remain stationary (called stator) just inside the alternator case. When current is passed through the rotor via the slip rings and brushes, the rotor becomes a rotating magnet having a magnetic field. When a magnetic field passes through a conductor (the stator), alternating current (A/C) is generated. This A/C current is rectified, turned into direct current (D/C), by the diodes located within the alternator. -

Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 the Mighty Railgun I. Abstract the Idea of This Project Is to Build a Railgun
Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 The Mighty Railgun (All Bark no Bite) I. Abstract The idea of this project is to build a railgun capable of firing a small metal projectile at substantial velocity. The original plan was to build iterative prototypes capable of firing small projectiles, and using them to figure out the ideal design for the final version, but the smaller versions were not very successful due to their relative lack of power, so it was difficult to use them to learn what to do. The final, largest scale railgun is powered by a bank of capacitors with an equivalent capacitance of 24.6mF charged to around 350V. This produces 3013.5J of energy discharged over approximately 58.75 µs (it varies for each firing), drawing a peak of about 1425A when firing a projectile (it once again varies) and about 1600A when not firing a projectile (short circuiting the rails). The railgun is capable of consistently firing a small piece of metal (usually aluminum or copper); however the projectile does not usually travel very far, although this is hard to measure due to the nature of the gun and the speed at which the firing takes place. II. Introduction Electricity is often seemingly mysterious, but we have come to accept and understand how through the interaction of electric and magnetic fields we can create a simple motor, as we did in the first semester. A railgun is just a linear electric motor, at very high speeds. What makes it different, however, is that it uses neither magnets nor coils of wire, and relies entirely on the induced magnetic field in the rails due to the extremely large current to produce a Lorentz Force to propel the projectile (which will be discussed in greater depth in the theory section). -

Belt Drive Systems: Potential for CO2 Reductions and How to Achieve Them
19 Belt drive 19 Belt drive Belt drive 19 Belt drive systems Potenti al for CO2 reducti ons and how to achieve them Hermann Sti ef Rainer Pfl ug Timo Schmidt Christi an Fechler 19 264 Schaeffl er SYMPOSIUM 2010 Schaeffl er SYMPOSIUM 2010 265 19 Belt drive Belt drive 19 If required, double-row Introducti on Tension pulleys and angular contact ball Single and double eccentric tensioners bearings (Figure 3) are Schaeffl er has volume produced components for idler pulleys used that also have an belt drive systems since 1977. For the past 15 years, opti mized grease sup- Schaeffl er has worked on the development of com- One use of INA idler pulleys is to reduce noise in ply volume. These plete belt drive systems in ti ming drives (Figure 1) criti cal belt spans, to prevent collision problems bearings are equipped as well as in accessory drives (Figure 2). with the surrounding structure, to guide the belt with high-temperature or to increase the angle of belt wrap on neighbor- rolling bearing greases ing pulleys. These pulleys have the same rati ng and appropriate seals. life and noise development requirements as belt Standard catalog bear- tensioning systems. For this applicati on, high-pre- ings are not as suitable Pulleys Variable camsha ming cision single-row ball bearings with an enlarged for this applicati on. grease supply volume have proven suffi cient. The tension pulleys in- stalled consist of single or double-row ball bearings specially de- veloped, opti mized and manufactured by INA for use in belt drive ap- Idler pulleys plicati ons. -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -

Leburg Electronic Ignition System EI10A Installation Manual
Leburg Electronic Ignition System EI10A Installation Manual For Aero VW’s - Or Any 2 Or 4 Cylinder 4 Stroke Engine Skycraft Ltd Telephone: 01406 540777 Riverside House Bloodfold Farm Website: www.skycraft.ltd Ravens Bank Saturday Bridge Email: [email protected] Holbeach Lincolnshire Facebook: @skycraftlimited PE12 8SR © Skycraft Ltd 2013 Leburg EI10A Manual—July 2020 Page 1 Contents 1. Read This First 2. The VW As An Aero Engine 3. Ignition System Performance 4. Principles Of Operation 5. Set Up 6. Power Supplies 7. Fitting A Honda CBR 600 Alternator 8. Manufacture & Assembly Notes 9. Wiring Notes 10. Wiring Up The Spark Plugs 11. Drawings © Skycraft Ltd 2013 Leburg EI10A Manual—July 2020 Page 2 1. Read This First By virtue of the techniques, design, components used and the care taken in building and testing, each ignition controller is believed to be highly reliable. The risk of failure is thus low, but it is finite. Therefore, this system is only made available on the basis that the user agrees to implement a Dual Ignition System. The Leburg system is the dual system, with the power supply system described in this manual. If any change from this is intended, you will need to check with the LAA that they will accept it. If a different alternator or power system is used, again, you will need to check with the LAA that they will accept it. The benefits of smooth running and getting the maximum power are obtained when the system is installed as described in this manual, with dual controllers, dual ignition spark plugs, both firing at the same time at the optimum advance angle. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Before Endine Start
C-A152 CESSNA – NORMAL PROCEDURES BEFORE ENGINE START THROUGH ENGINE SHUTDOWN – CHECKLIST WILL BE VERBALIZED BEFORE ENGINE START WINDOWS ..................................................................................................................... SECURE CABIN DOORS ............................................................................................................. CLOSED TACH TIME ................................................................................... CHECK TIME REMAINING HOBBS TIME ................................................................................................................ RECORD BEFORE TAKE-OFF BRAKES ....................................................................................... APPLY TOE BRAKES ONLY TYPE OF TAKEOFF .............................................................................................. DETERMINE PASSENGER BRIEF ................................................................................................ COMPLETE FLAPS .................................................................................................................. AS REQUIRED SEATBELTS AND HARNESSES .........................................................FASTEN AND SECURE AIRSPEEDS: ROTATION, CLIMB OUT, CABIN DOOR ......................................................................................... CLOSE AND SECURE AND BEST GLIDE ................................................................... CALCULATE (GUST SPREAD) PRE-TAKEOFF BRIEFING .....................................................................................