Downer in Western Australia
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
LEGISLATIVE COUNCIL Question on Notice
LEGISLATIVE COUNCIL Question On Notice Thursday, 13 February 2020 2799. Hon Robin Chappie to the Minister for Re ional Development representing the Minister for Water I refer to the issue of water consumption in the Pilbara, and I ask: (a) for each mine in the Pilbara, by company and location, and for the most recently completed reporting year, would the Minister please table: (i) the licensed water abstraction amounts, inclusive of mine dewatering; (ii) the licensed aquifer reinjection rates; (iii) the actual e traction rates; and (i ) the actual reinjection rates; (b) what is the total water consumption of the Pilbara region, inclusive of mine dewatering but exclusive of aquifer reinjection and residential consumption; (c) split out by year and dating back to the beginning of the 2010 reporting year, what is the total amount the Water Corporation has earned in fixed and variable use water charges and rates from industrial and mining companies, exclusi e of residential customers; (d) which mines in the Pilbara have aquifer reinjection schemes in operation; and (e) for each ine with an aquifer reinjection scheme in operation, can the Minister please outline how each of these schemes work, as split out by operation, describing: (i) the nature of each scheme itself (i.e. the model used); (ii) the name of the aquifer being recharged by each scheme; and (iii) the name of the formation within each aquifer that is being recharged? Answer (a) (i) Yes [See tabled paper no.] (ii) Mines that have licensed aquifer reinjection schemes, with current -
Welcome to Cloudbreak
Welcome to Cloudbreak This booklet provides you with the information needed to help make your stay at Cloudbreak more pleasant. Please take the time to read through the information before arriving on site. FEBRUARY 2009 Table of Contents Welcome Message ........................................................................................... 1 Foreword ..................................................................................................... 1 PART ONE: Before you depart ......................................................................... 2 The Pilbara ....................................................................................................... 3 Fortescue Metals Group Limited ...................................................................... 3 Cloudbreak....................................................................................................... 3 Packed and ready to go .................................................................................... 4 At the departure lounge ............................................................................... 4 Parking at Perth Airport ............................................................................... 5 Staying in touch ............................................................................................... 5 On Arrival ......................................................................................................... 5 At the Airstrip .............................................................................................. -

Mining Robotics”
Springer Handbook of Robotics (2nd Edition) Chapter on “Mining Robotics” Joshua Marshall Queen’s University Mining Systems Laboratory Kingston, ON K7L 3N6, Canada e-mail: [email protected] Adrian Bonchis CSIRO ICT Centre 1 Technology Court Pullenvale QLD 4069, Australia e-mail: [email protected] Eduardo Nebot The University of Sydney Australian Centre for Field Robotics Sydney NSW 2006, Australia e-mail: [email protected] Steve Scheding The University of Sydney Australian Centre for Field Robotics Sydney NSW 2006, Australia e-mail: [email protected] Revised on May 9, 2014 Contents 1 Mining Robotics 3 1.1 Modern Mining Practice . .3 1.1.1 Stages of Mining . .4 1.1.2 Technology Drivers in Mining . .5 1.2 Surface Mining . .8 1.2.1 Automated Haulage . .8 1.2.2 Fleet Management . 11 1.2.3 Robotic Digging . 13 1.2.4 Robotic Dozing . 15 1.2.5 Autonomous Blasthole Drilling . 16 1.2.6 Telerobotic Rock Breaking . 17 1.2.7 Automated Loading Unit and Truck Interactions . 18 1.2.8 Dragline Automation . 22 1.2.9 Machine Positioning and Terrain Mapping . 23 1.2.10 Mine Safety . 25 1.3 Underground Mining . 29 1.3.1 Telerobotic Operations . 29 1.3.2 Autonomous Tramming . 29 1.3.3 Robotic Loading . 32 1.3.4 Longwall Automation . 35 1.3.5 Robotic Explosives Loading . 37 1.3.6 Underground Mapping, Surveying, and Positioning . 39 1.4 Challenges, Outlook, and Conclusion . 42 1.4.1 Technical Challenges . 42 1.4.2 Socio-Economic Challenges . -

Western Australia Gas Statement of Opportunities
Western Australia Gas Statement of Opportunities December 2018 Important notice PURPOSE The purpose of this publication is to provide information about the natural gas industry in Western Australia. AEMO publishes this Western Australian Gas Statement of Opportunities (GSOO) in accordance with rule 103 of the Gas Services Information Rules (GSI Rules). This publication has been prepared by AEMO using information available at 14 August 2018. Information made available after this date may have been included in this publication, where practical. DISCLAIMER This document, or the information in it, may be subsequently updated or amended. This document does not constitute legal or business advice, and should not be relied on as a substitute for obtaining detailed advice about the Gas Services Information Rules, or any other applicable laws, procedures or policies. AEMO has made every effort to ensure the quality of the information in this document, but cannot guarantee its accuracy or completeness. Accordingly, to the maximum extent permitted by law, AEMO and its officers, employees and consultants involved in the preparation of this document: • make no representation or warranty, express or implied, as to the currency, accuracy, reliability or completeness of the information in this document; and • are not liable (whether by reason of negligence or otherwise) for any statements or representations in this document, or any omissions from it, or for any use or reliance on the information in it. ACKNOWLEDGEMENTS AND FEEDBACK AEMO acknowledges the support, co-operation and the contribution of Gas Market Participants and gas stakeholders for providing data and information, received via formal and informal feedback, used in this publication. -

Strategy Delivery Growth
Rio Tinto 2009 Annual report Rio Tinto Financial calendar Strategy 2010 14 January Fourth quarter 2009 operations review 11 February Announcement of results for 2009 24 February Rio Tinto plc and Rio Tinto Limited shares and Rio Tinto plc ADRs quoted “ex-dividend” for 2009 fi nal dividend Delivery 26 February Record date for 2009 fi nal dividend for Rio Tinto plc shares and ADRs 2 March Record date for 2009 fi nal dividend for Rio Tinto Limited shares 11 March Plan notice date for election under the dividend reinvestment plan for the 2009 fi nal dividend 1 April Payment date for 2009 fi nal dividend to holders of Ordinary shares and ADRs Growth 15 April Annual general meeting for Rio Tinto plc 15 April First quarter 2010 operations review 22 April Annual general meeting for Rio Tinto Limited A focused and 14 July Second quarter 2010 operations review 5 August Announcement of half year results for 2010 integrated strategy 11 August Rio Tinto plc and Rio Tinto Limited shares and Rio Tinto plc ADRs quoted “ex-dividend” for 2010 interim dividend 13 August Record date for 2010 interim dividend for Rio Tinto plc shares and ADRs 17 August Record date for 2010 interim dividend for Rio Tinto Limited shares Excellence in 18 August Plan notice date for election under the dividend reinvestment plan for the 2010 interim dividend 9 September Payment date for 2010 interim dividend to holders of Ordinary shares and ADRs operational delivery 14 October Third quarter 2010 operations review 2011 Positioned for growth January Fourth quarter 2010 operations review February Announcement of results for 2010 Useful information and contacts Registered offi ces Investor Centre Rio Tinto Limited Rio Tinto plc To fi nd out more about Investor Centre, go to Computershare Investor Services Pty Limited 2 Eastbourne Terrace www.investorcentre.co.uk/riotinto GPO Box 2975 London Holders of Rio Tinto American Melbourne W2 6LG Depositary Receipts (ADRs) Victoria 3001 Registered in England No. -

Alinta Energy Sustainability Report 2018/19
Alinta Energy Sustainability Report 2018/19 ABN 39 149 229 998 Contents A message from our Managing Director and CEO 2 Employment 50 FY19 highlights 4 Employment at Alinta Energy 52 Key sustainability performance measures 6 Employee engagement 53 Employee data 54 Our business 8 Supporting our people 55 Offices 10 Ownership 10 Our communities 60 Where we operate 12 Community development program 62 Electricity generation portfolio 14 Employee volunteering 62 Sales and customers 17 Sponsorships, donations and partnerships 64 Vision and values 18 Excellence Awards – community contribution 64 Business structure and governance 19 Community impacts from operations 65 Executive leadership team 20 Management committees 21 Markets and customers 66 Board biographies 21 Customer service 68 Risk management and compliance 23 Branding 72 Economic health 24 New products and projects 74 Market regulation and compliance 74 Safety 26 Fusion – our transformation program 77 Safety performance 28 Safety governance 29 Our report 80 Safety and wellbeing initiatives and programs 32 Reporting principles 82 Glossary 83 Environment 34 GRI and UNSDG content index 85 Climate change and energy industry 36 Sustainability materiality assessment 88 National government programs, policies and targets 39 Deloitte Assurance Report 96 State government programs, policies and targets 40 Energy consumption and emissions 42 Our approach to renewable energy 43 Energy efficiency and emission reduction projects 45 Environmental compliance 46 Waste and water 47 Case study 48 2018/19 Alinta Energy - Sustainability Report Page 1 Changes to our vision and leadership A message My comment above on our new vision to be the best energy company sounds a little different than in the past. -

20130627 D107351
Ref: O10_0347 Submission to the Economic Regulation Authority – Floor and ceiling costs proposed by The Pilbara Infrastructure (TPI) 11 June 2013 FLOOR AND CEILING COSTS PROPOSED BY THE PILBARA INFRASTRUCTURE (TPI) TABLE OF CONTENTS 1. EXECUTIVE SUMMARY ....................................................................................................................... 2 2. CONTEXT AND PURPOSE ................................................................................................................... 2 1. Context .......................................................................................................................................... 2 2. Purpose........................................................................................................................................... 3 3. REQUIREMENTS OF THE CODE ........................................................................................................... 4 4. COMMENTS ON COSTS PROPOSED BY TPI ....................................................................................... 5 1. TPI failure to provide costs for proposed access ................................................................... 5 2. TPI failure to provide Costing Model or supporting information ......................................... 5 3. Factors to be considered in an assessment of costs ............................................................. 6 5. BROCKMAN’S ASSESSMENT OF COSTS FOR THE ROUTE .................................................................. 7 6. COMPARISON -

Shire of Ashburton Ordinary Council Meeting Agenda
AGENDA – ORDINARY MEETING OF COUNCIL 1 16 October 2007 SHIRE OF ASHBURTON ORDINARY COUNCIL MEETING AGENDA Council Chambers, TOM PRICE 16 October 2007 AGENDA – ORDINARY MEETING OF COUNCIL 2 16 October 2007 SHIRE OF ASHBURTON ORDINARY COUNCIL MEETING Dear Councillor, Notice is hereby given that an Ordinary Meeting of the Council of the Shire of Ashburton will be held on Tuesday 16 October, 2007 at Council Chambers, Tom Price commencing at 9.00am. The business to be transacted is shown in the Agenda. Keith Pearson CHIEF EXECUTIVE OFFICER 10 October 2007 DISCLAIMER The recommendations contained in the Agenda are subject to confirmation by Council. The Shire of Ashburton warns that anyone who has any application lodged with Council must obtain and should only rely on written confirmation of the outcomes of the application following the Council meeting, and any conditions attaching to the decision made by the Council in respect of the application. No responsibility whatsoever is implied or accepted by the Shire of Ashburton for any act, omission or statement or intimation occurring during a Council meeting. AGENDA – ORDINARY MEETING OF COUNCIL 3 16 October 2007 1.10.0 DECLARATION OF OPENING .....................................................................................................................5 2.10.0 ANNOUNCEMENT OF VISITORS.................................................................................................................5 3.10.0 ATTENDANCE..............................................................................................................................................5 -

Rio Tinto Iron Ore Legend Greater Paraburdoo
563000 564000 565000 566000 567000 568000 569000 570000 571000 572000 573000 574000 !!!((( ") ") ") ") ") ") ") ") ") ") 7430000 ") 7429000 7428000 !( ") ") !( ") ") ") ") ") ") 7427000 ") ") 7426000 ") *# !( ") !( """"""")))))))!( ") 7425000 Legend 7424000 Proposed Development Envelope Other fauna detected Proposed Conceptual Pits 20181214 !( Stygofauna Paraburdoo Approved PITS 141218 ") Troglofauna Rio Tinto Iron Ore Habitat modelling confidence boundary (300m) WCS AWT Habitat (High/Med) Greater Paraburdoo Subterranean Fauna Survey Status, Morphospecies, Risk Habitat thickness High : 286m Fig. 7.2b: WCS (modelled) extent of AWT habitat *# Symphyella `WAM-SYMPH002`, Low for troglofauna known only from Eastern Range 1:30,000 Low : 1m Coordinate System: GDA 1994 MGA Zone 50 0 0.4 0.8 1.6 Projection: Transverse Mercator ¯ km Datum: GDA 1994 Size A3. Created 01/05/2019 Greater Paraburdoo Subterranean Fauna Survey 7.3 Types of impacts to stygofauna Direct impacts to stygofauna assemblages and habitats comprise the removal of porous/ fractured hydrogeological strata from BWT mining, and depletion of groundwater by abstraction for mine dewatering and operational uses. The propagation of groundwater drawdown throughout all suitable, connected hydrogeological habitats is considered to be a direct impact, regardless of distance from the mine or whether the drawdown propagates through strata with different porosities. Nevertheless, the direct impact from groundwater drawdown is more complex to measure and assess than removal of porous hydrogeological -
ERM Power's Neerabup
PROSPECTUS for the offer of 57,142,858 Shares at $1.75 per Share in ERM Power For personal use only Global Co-ordinator Joint Lead Managers ERMERR M POWERPOWEPOWP OWE R PROSPECTUSPROSPEOSP CTUCTUSTU 1 Important Information Offer Information. Proportionate consolidation is not consistent with Australian The Offer contained in this Prospectus is an invitation to acquire fully Accounting Standards as set out in Sections 1.2 and 8.2. paid ordinary shares in ERM Power Limited (‘ERM Power’ or the All fi nancial amounts contained in this Prospectus are expressed in ‘Company’) (‘Shares’). Australian currency unless otherwise stated. Any discrepancies between Lodgement and listing totals and sums and components in tables and fi gures contained in this This Prospectus is dated 17 November 2010 and a copy was lodged with Prospectus are due to rounding. ASIC on that date. No Shares will be issued on the basis of this Prospectus Disclaimer after the date that is 13 months after 17 November 2010. No person is authorised to give any information or to make any ERM Power will, within seven days after the date of this Prospectus, apply representation in connection with the Offer which is not contained in this to ASX for admission to the offi cial list of ASX and quotation of Shares on Prospectus. Any information not so contained may not be relied upon ASX. Neither ASIC nor ASX takes any responsibility for the contents of this as having been authorised by ERM Power, the Joint Lead Managers or Prospectus or the merits of the investment to which this Prospectus relates. -
Feature Feature Major Wa Mining Projects
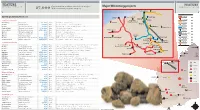
FEATURE FEATURE MINING OUTLOOK Construction workers needed for major Major WA mining projects MINING OUTLOOK 27,000 WA resources projects 2014-15 Source: Pitcrew Port Hedland Pardoo Rio Tinto rail MAJOR WA MINING PROJECTS Dampier Cape Lambert Iron Bridge Mt Dove Rio Tinto mine Completed in past year Balla Balla Abydos (Forge Resources) BHP rail Karara Mining Karara project $2.6bn Mid West Production ramp-up proceeding Sino Iron Wodgina Rio Tinto Hope Downs 4 mine $2.1bn Pilbara First production in H1 2013, ramping up to 15mtpa BHP mine Rio Tinto Marandoo mine expansion $1.1bn Pilbara Production will be sustained at 15mtpa for 16 further years Mt Webber McPhee Creek FMG rail Fortescue Metals Christmas Creek 2 expansion $US1.0bn Pilbara Completed in June 2013 quarter Fortescue Metals Port Hedland port expansion $US2.4bn Pilbara Fourth berth and support infrastructure opened in Aug 2013 Pannawonica FMG mine Atlas Iron Mt Dove mine development n/a Pilbara Production commenced in Dec 2012 Hancock proposed rail Atlas Iron Abydos mine development n/a Pilbara First haulage in Aug 2013, ramping up to 2-3mtpa Solomon Atlas Iron Utah Point 2 stockyard n/a Pilbara Largely complete and now ready to receive ore Hancock mine Hub Christmas Creek Rio Tinto Argyle Diamonds underground mine $US2.2bn Kimberley Production commenced in H1 2013 and is ramping up Buckland (Iron Ore Holdings) Cloudbreak Mineral Resources Sandfire Resources DeGrussa copper mine $US384m Mid West Ramp-up to nameplate production nearing completion Koodaideri Roy Hill Atlas Iron Construction -

GRIFFIN ELECTRICITY PTY LTD Collie B Power Station
GRIFFIN ELECTRICITY PTY LTD Collie B Power Station (Collie B) Proponent’s Response to Submissions April 2005 Table of Contents 1 SUMMARY OF SUBMISSIONS RECEIVED........................................................ 1 2 NOISE................................................................................................................... 3 3 SURFACE WATER AND GROUNDWATER ....................................................... 7 4 FLORA AND FAUNA ......................................................................................... 12 5 ATMOSPHERIC EMISSIONS ............................................................................ 13 6 GREENHOUSE ISSUES .................................................................................... 29 7 LIQUID AND SOLID WASTE DISPOSAL.......................................................... 38 8 SOCIAL AND HERITAGE ISSUES.................................................................... 51 9 OTHER ISSUES ................................................................................................. 52 10 GLOSSARY........................................................................................................ 56 11 BIBLIOGRAPHY ................................................................................................ 59 Collie B Power Station – Responses to Issues raised in Submissions Page i List of Tables Table 1 – Summary of Noise Levels ...................................................................................3 Table 2 - Collie Power Station Sound Power Level............................................................4