The Next Steps in Exploring Deep Space” at ESTEC, Noordwijk, Netherlands, Sept 22-23, 2003
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
International Space Exploration Strategy Group International Space Exploration
INTERNATIONAL SPACE EXPLORATION STRATEGY GROUP INTERNATIONAL SPACE EXPLORATION. STRATEGY GROUP ADVANCING THE EXPLORATION FRONTIER For the last forty years, human In recent years multiple reports define exploration in the coming space exploration has made have recommended international decades. significant progress through partners come together for The group will bring together the international collaboration. The strategic planning activities. interests of all human spaceflight Apollo-Soyuz Test Project and However, many national partners, rather than national Shuttle-Mir Programs marked government planning activities interests subject to changing the end of the Space Race, are severely limited in their political influences. and advanced long duration consideration of international This project provides a unique spaceflight. The International partners. Furthermore, opportunity for current and Space Station (ISS) is now in its government and industry recent graduate student second decade as a continuously planners may not have access researchers to collaborate with occupied human outpost in Low- to the latest technologies being others from around the world. Earth Orbit (LEO). While we developed at leading research Most importantly, participants expect productive utilization of institutions around the world. will have the opportunity to ISS through at least 2020, there We believe an international influence the government and is currently no internationally graduate student working group industry decision makers that recognized program for human is well-suited to generate and define future human exploration exploration beyond LEO. communicate the ideas that will strategy. 3 INTERNATIONAL SPACE EXPLORATION. STRATEGY GROUP INTERNATIONAL SPACE EXPLORATION. STRATEGY GROUP LEADERSHIP Edward Crawley is President of the Skolkovo Institute of Science and Technology (Skoltech). -

Supportability for Beyond Low Earth Orbit Missions
Supportability for Beyond Low Earth Orbit Missions William Cirillo1 and Kandyce Goodliff2 NASA Langley Research Center, Hampton, VA, 23681 Gordon Aaseng3 NASA Ames Research Center, Moffett Field, CA, 94035 Chel Stromgren4 Binera, Inc., Silver Springs, MD, 20910 and Andrew Maxwell5 Georgia Institute of Technology, Hampton, VA 23666 Exploration beyond Low Earth Orbit (LEO) presents many unique challenges that will require changes from current Supportability approaches. Currently, the International Space Station (ISS) is supported and maintained through a series of preplanned resupply flights, on which spare parts, including some large, heavy Orbital Replacement Units (ORUs), are delivered to the ISS. The Space Shuttle system provided for a robust capability to return failed components to Earth for detailed examination and potential repair. Additionally, as components fail and spares are not already on-orbit, there is flexibility in the transportation system to deliver those required replacement parts to ISS on a near term basis. A similar concept of operation will not be feasible for beyond LEO exploration. The mass and volume constraints of the transportation system and long envisioned mission durations could make it difficult to manifest necessary spares. The supply of on-demand spare parts for missions beyond LEO will be very limited or even non-existent. In addition, the remote nature of the mission, the design of the spacecraft, and the limitations on crew capabilities will all make it more difficult to maintain the spacecraft. Alternate concepts of operation must be explored in which required spare parts, materials, and tools are made available to make repairs; the locations of the failures are accessible; and the information needed to conduct repairs is available to the crew. -

Planetary Report Report
The PLANETARYPLANETARY REPORT REPORT Volume XXIX Number 1 January/February 2009 Beyond The Moon From The Editor he Internet has transformed the way science is On the Cover: Tdone—even in the realm of “rocket science”— The United States has the opportunity to unify and inspire the and now anyone can make a real contribution, as world’s spacefaring nations to create a future brightened by long as you have the will to give your best. new goals, such as the human exploration of Mars and near- In this issue, you’ll read about a group of amateurs Earth asteroids. Inset: American astronaut Peggy A. Whitson who are helping professional researchers explore and Russian cosmonaut Yuri I. Malenchenko try out training Mars online, encouraged by Mars Exploration versions of Russian Orlan spacesuits. Background: The High Rovers Project Scientist Steve Squyres and Plane- Resolution Camera on Mars Express took this snapshot of tary Society President Jim Bell (who is also head Candor Chasma, a valley in the northern part of Valles of the rovers’ Pancam team.) Marineris, on July 6, 2006. Images: Gagarin Cosmonaut Training This new Internet-enabled fun is not the first, Center. Background: ESA nor will it be the only, way people can participate in planetary exploration. The Planetary Society has been encouraging our members to contribute Background: their minds and energy to science since 1984, A dust storm blurs the sky above a volcanic caldera in this image when the Pallas Project helped to determine the taken by the Mars Color Imager on Mars Reconnaissance Orbiter shape of a main-belt asteroid. -

Mars Reconnaissance Orbiter
Chapter 6 Mars Reconnaissance Orbiter Jim Taylor, Dennis K. Lee, and Shervin Shambayati 6.1 Mission Overview The Mars Reconnaissance Orbiter (MRO) [1, 2] has a suite of instruments making observations at Mars, and it provides data-relay services for Mars landers and rovers. MRO was launched on August 12, 2005. The orbiter successfully went into orbit around Mars on March 10, 2006 and began reducing its orbit altitude and circularizing the orbit in preparation for the science mission. The orbit changing was accomplished through a process called aerobraking, in preparation for the “science mission” starting in November 2006, followed by the “relay mission” starting in November 2008. MRO participated in the Mars Science Laboratory touchdown and surface mission that began in August 2012 (Chapter 7). MRO communications has operated in three different frequency bands: 1) Most telecom in both directions has been with the Deep Space Network (DSN) at X-band (~8 GHz), and this band will continue to provide operational commanding, telemetry transmission, and radiometric tracking. 2) During cruise, the functional characteristics of a separate Ka-band (~32 GHz) downlink system were verified in preparation for an operational demonstration during orbit operations. After a Ka-band hardware anomaly in cruise, the project has elected not to initiate the originally planned operational demonstration (with yet-to-be used redundant Ka-band hardware). 201 202 Chapter 6 3) A new-generation ultra-high frequency (UHF) (~400 MHz) system was verified with the Mars Exploration Rovers in preparation for the successful relay communications with the Phoenix lander in 2008 and the later Mars Science Laboratory relay operations. -

Annual Report COOPERATIVE INSTITUTE for RESEARCH in ENVIRONMENTAL SCIENCES
2015 Annual Report COOPERATIVE INSTITUTE FOR RESEARCH IN ENVIRONMENTAL SCIENCES COOPERATIVE INSTITUTE FOR RESEARCH IN ENVIRONMENTAL SCIENCES 2015 annual report University of Colorado Boulder UCB 216 Boulder, CO 80309-0216 COOPERATIVE INSTITUTE FOR RESEARCH IN ENVIRONMENTAL SCIENCES University of Colorado Boulder 216 UCB Boulder, CO 80309-0216 303-492-1143 [email protected] http://cires.colorado.edu CIRES Director Waleed Abdalati Annual Report Staff Katy Human, Director of Communications, Editor Susan Lynds and Karin Vergoth, Editing Robin L. Strelow, Designer Agreement No. NA12OAR4320137 Cover photo: Mt. Cook in the Southern Alps, West Coast of New Zealand’s South Island Birgit Hassler, CIRES/NOAA table of contents Executive summary & research highlights 2 project reports 82 From the Director 2 Air Quality in a Changing Climate 83 CIRES: Science in Service to Society 3 Climate Forcing, Feedbacks, and Analysis 86 This is CIRES 6 Earth System Dynamics, Variability, and Change 94 Organization 7 Management and Exploitation of Geophysical Data 105 Council of Fellows 8 Regional Sciences and Applications 115 Governance 9 Scientific Outreach and Education 117 Finance 10 Space Weather Understanding and Prediction 120 Active NOAA Awards 11 Stratospheric Processes and Trends 124 Systems and Prediction Models Development 129 People & Programs 14 CIRES Starts with People 14 Appendices 136 Fellows 15 Table of Contents 136 CIRES Centers 50 Publications by the Numbers 136 Center for Limnology 50 Publications 137 Center for Science and Technology -
Craters in Shadow
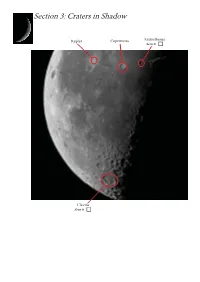
Section 3: Craters in Shadow Kepler Copernicus Eratosthenes Seen it Clavius Seen it Section 3: Craters in Shadow Visibility: A pair of binoculars is the minimum requirement to see these features. When: Look for them when the terminator’s close by, typically a day before last quarter. Not all craters are best seen when the Sun is high in the lunar sky - in fact most aren’t! If craters aren’t par- ticularly bright or dark, they tend to disappear into the background when the Moon’s phase is close to full. These craters are best seen when the ‘terminator’ is nearby, or when the Sun is low in the lunar sky as seen from the crater. This causes oblique lighting to fall on the crater and create exaggerated shadows. Ultimately, this makes the crater look more dramatic and easier to see. We’ll use this effect for the next section on lunar mountains, but before we do, there are a couple of craters that we’d like to bring to your attention. Actually, the Moon is covered with a whole host of wonderful craters that look amazing when the lighting is oblique. During the summer and into the early autumn, it’s the later phases of the Moon are best positioned in the sky - the phases following full Moon. Unfortunately, this means viewing in the early hours but don’t worry as we’ve kept things simple. We just want to give you a taste of what a shadowed crater looks like for this marathon, so the going here is really pretty easy! First, locate the two craters Kepler and Copernicus which were marathon targets pointed out in Section 2. -

Joint Session on Human and Robotic Partnerships to Realize Space Exploration Goals (3.-B3.6)
Paper ID: 11248 62nd International Astronautical Congress 2011 14th HUMAN EXPLORATION OF THE MOON AND MARS SYMPOSIUM (A5) Joint session on Human and Robotic Partnerships to Realize Space Exploration Goals (3.-B3.6) Author: Mr. Dipl. Physiker. Jeffrey Hendrikse Airbus DS GmbH, Germany, jeff[email protected] Ms. Ayako Ono Tohoku University Graduate School of Medicine, Japan, [email protected] Dr. Irene Lia Schlacht Politecnico di Milano / Technische Universitaet Berlin, Italy, [email protected] Mr. Ivo Ferreira Instituto Superior T´ecnico,Portugal, [email protected] Dr. Balwant Rai India, drbalwantraissct@rediffmail.com Mr. Romain Benchenafi Ecole de l'Air, France, r.benchenafi@hotmail.fr Mr. K´evinTheatre Ecole de l'Air, France, [email protected] Ms. Audrey Lan San Ecole de l'Air, France, [email protected] Mr. Quentin Bourges Ecole de l'Air, France, [email protected] Mr. Matthieu Ansart Ecole de l'Air, France, [email protected] Ms. Rachel Dompnier Ecole de l'Air, France, rachel [email protected] Prof. Bernard Foing ILEWG, The Netherlands, [email protected] HUMAN AND ROBOTIC PARTNERSHIPS FROM EUROMOONMARS ANALOGUE MISSIONS 2011 Abstract The International Lunar Exploration Working Group (ILEWG) through the means of the EuroMoon- Mars missions investigates the feasibility and limitations of human and robotic planetary exploration. Field tests were performed since 2008 up to 2011 at the Mars Desert Research Station (MDRS) in Utah. In two week rotations crews of six members came to the station to perform new missions and established the knowledge, conditions, systems, and equipment necessary to perform successful planetary exploration activities. -

Toward Designing Social Human-Robot Interactions for Deep Space Exploration
Toward Designing Social Human-Robot Interactions for Deep Space Exploration Huili Chen Cynthia Breazeal MIT Media Lab MIT Media Lab [email protected] [email protected] ABSTRACT sleep deprivation, decrease in group cohesion, and decrease in mo- In planning for future human space exploration, it is important to tivation [8]. On the team level, factors related to interpersonal consider how to design for uplifting interpersonal communications communications and group dynamics among astronauts also deci- and social dynamics among crew members. What if embodied social sively impact mission success. For example, astronauts will have to robots could help to improve the overall team interaction experi- live in an ICE condition for the entirety of the mission, necessitating ence in space? On Earth, social robots have been shown effective group living skills to combat potential interpersonal problems [11]. in providing companionship, relieving stress and anxiety, fostering Their diverse cultural backgrounds may additionally impact coping connection among people, enhancing team performance, and medi- in an ICE environment and interplanetary crew’s behavior [49]. ating conflicts in human groups. In this paper, we introduce asetof Unlike shorter-duration space missions, LDSE missions require as- novel research questions exploring social human-robot interactions tronauts to have an unprecedented level of autonomy, leading to in long-duration space exploration missions. greater importance of interpersonal communication among crew members for mission success. The real-time support and interven- KEYWORDS tions from human specialists on Earth (e.g., psychologist, doctor, conflict mediator) are reduced to minimal due to costly communi- Human-robot Interaction, Long-duration Human Space Mission, cation and natural delays in communication between space and Space Robot Companion, Social Connection Earth. -

Science in Nasa's Vision for Space Exploration
SCIENCE IN NASA’S VISION FOR SPACE EXPLORATION SCIENCE IN NASA’S VISION FOR SPACE EXPLORATION Committee on the Scientific Context for Space Exploration Space Studies Board Division on Engineering and Physical Sciences THE NATIONAL ACADEMIES PRESS Washington, D.C. www.nap.edu THE NATIONAL ACADEMIES PRESS 500 Fifth Street, N.W. Washington, DC 20001 NOTICE: The project that is the subject of this report was approved by the Governing Board of the National Research Council, whose members are drawn from the councils of the National Academy of Sciences, the National Academy of Engineering, and the Institute of Medicine. The members of the committee responsible for the report were chosen for their special competences and with regard for appropriate balance. Support for this project was provided by Contract NASW 01001 between the National Academy of Sciences and the National Aeronautics and Space Administration. Any opinions, findings, conclusions, or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the sponsors. International Standard Book Number 0-309-09593-X (Book) International Standard Book Number 0-309-54880-2 (PDF) Copies of this report are available free of charge from Space Studies Board National Research Council The Keck Center of the National Academies 500 Fifth Street, N.W. Washington, DC 20001 Additional copies of this report are available from the National Academies Press, 500 Fifth Street, N.W., Lockbox 285, Washington, DC 20055; (800) 624-6242 or (202) 334-3313 (in the Washington metropolitan area); Internet, http://www.nap.edu. Copyright 2005 by the National Academy of Sciences. -

18Th EANA Conference European Astrobiology Network Association
18th EANA Conference European Astrobiology Network Association 24-28 September 2018 Freie Universität Berlin, Germany Sponsors: Scientific Organizing Committee (EANA Council): Daniela Billi, Italy Oleg Kotsyurbenko, Russia Alexis Brandeker, Sweden Helmut Lammer, Austria John Brucato, Italy Harry Lehto, Finland Barbara Cavalazzi, Italy Kirsi Lehto, Finland Elias Chatzitheodoridis, Greece Zita Martins, Portugal Charles Cockell, UK Nigel Mason, UK Hervé Cottin, France Ralf Möller, Germany Rosa De la Torre, Spain Christine Moissl-Eichinger, Austria Jean-Pierre De Vera, Germany Lena Noack, Germany René Demets, ESA Karen Olsson-Francis, UK Cristina Dobrota, Romania François Raulin, France Pascale Ehrenfreund, The Netherlands Petra Rettberg, Germany Franco Ferrari, Poland Séverine Robert, Belgium Kai Finster, Denmark Gyorgyi Ronto, Hungary Muriel Gargaud, France Dirk Schulze-Makuch, Germany Beda Hofmann, Switzerland Alan Schwartz, The Netherlands Nils Holm, Sweden Ewa Szuszkiewicz, Poland Jan Jehlicka, Czech Republic Ruth-Sophie Taubner, Austria Jean-Luc Josset, Switzerland Jorge Vago, The Netherlands Kensei Kobayashi, Japan Frances Westall, France Local Organizing Committee: Lena Noack (FU) Lutz Hecht (MfN, FU) Jean-Pierre de Vera (DLR, DAbG) Jacob Heinz (TU) Dirk Schulze-Makuch (TU, DAbG) Dennis Höning (VU Amsterdam) Alessandro Airo (TU) Deborah Maus (TU) Felix Arens (FU) Ralf Möller (DLR) Alexander Balduin Carolin Rabethge (FU) Mickael Baqué (DLR) Heike Rauer (DLR, TU, FU) Doris Breuer -
Worry Over Mistreating Clots Drove Push to Pause J&J Shot
P2JW109000-6-A00100-17FFFF5178F ****** MONDAY,APRIL 19,2021~VOL. CCLXXVII NO.90 WSJ.com HHHH $4.00 Last week: DJIA 34200.67 À 400.07 1.2% NASDAQ 14052.34 À 1.1% STOXX 600 442.49 À 1.2% 10-YR. TREASURY À 27/32 , yield 1.571% OIL $63.13 À $3.81 EURO $1.1982 YEN 108.81 Bull Run What’s News In Stocks Widens, Business&Finance Signaling More stocks have been propelling the U.S. market higher lately,asignal that fur- Strength ther gains could be ahead, but howsmooth the climb might be remains up fordebate. A1 Technical indicators WeWork’s plan to list suggestmoregains, stock by merging with a but some question how blank-check company has echoes of its approach in smooth theywill be 2019,when the shared-office provider’s IPO imploded. A1 BY CAITLIN MCCABE Citigroup plans to scale up its services to wealthy GES Agreater number of stocks entrepreneurs and their IMA have been propelling the U.S. businesses in Asia as the market higher lately,asignal bank refocuses its opera- GETTY that—if historyisany indica- tions in the region. B1 SE/ tor—moregains could be ahead. What remains up forde- A Maryland hotel mag- bate, however, is how smooth natebehind an 11th-hour bid ANCE-PRES FR the climb will be. to acquireTribune Publish- Indicatorsthat point to a ing is working to find new ENCE stronger and moreresilient financing and partnership AG stock market have been hitting options after his partner ON/ LL rare milestones recently as the withdrew from the deal. -

Soviet Steps Toward Permanent Human Presence in Space
SALYUT: Soviet Steps Toward Permanent Human Presence in Space December 1983 NTIS order #PB84-181437 Recommended Citation: SALYUT: Soviet Steps Toward Permanent Human Presence in Space–A Technical Mere- orandum (Washington, D. C.: U.S. Congress, Office of Technology Assessment, OTA- TM-STI-14, December 1983). Library of Congress Catalog Card Number 83-600624 For sale by the Superintendent of Documents, U.S. Government Printing Office, Washington, D.C. 20402 Foreword As the other major spacefaring nation, the Soviet Union is a subject of interest to the American people and Congress in their deliberations concerning the future of U.S. space activities. In the course of an assessment of Civilian Space Stations, the Office of Technology Assessment (OTA) has undertaken a study of the presence of Soviets in space and their Salyut space stations, in order to provide Congress with an informed view of Soviet capabilities and intentions. The major element in this technical memorandum was a workshop held at OTA in December 1982: it was the first occasion when a significant number of experts in this area of Soviet space activities had met for extended unclassified discussion. As a result of the workshop, OTA prepared this technical memorandum, “Salyut: Soviet Steps Toward Permanent Human Presence in Space. ” It has been reviewed extensively by workshop participants and others familiar with Soviet space activities. Also in December 1982, OTA wrote to the U. S. S. R.’s Ambassador to the United States Anatoliy Dobrynin, requesting any information concerning present and future Soviet space activities that the Soviet Union judged could be of value to the OTA assess- ment of civilian space stations.