Newton's Laws
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Transformation of Torques Between the Laboratory and Center
On the transformation of torques between the laboratory and center of mass reference frames Rodolfo A. Diaz,∗ William J. Herrera† Universidad Nacional de Colombia, Departamento de F´ısica. Bogot´a, Colombia. Abstract It is commonly stated in Newtonian Mechanics that the torque with respect to the laboratory frame is equal to the torque with respect to the center of mass frame plus a R × F factor, with R being the position of the center of mass and F denoting the total external force. Although this assertion is true, there is a subtlety in the demonstration that is overlooked in the textbooks. In addition, it is necessary to clarify that if the reference frame attached to the center of mass rotates with respect to certain inertial frame, the assertion is not true any more. PACS {01.30.Pp, 01.55.+b, 45.20.Dd} Keywords: Torque, center of mass, transformation of torques, fictitious forces. In Newtonian Mechanics, we define the total external torque of a system of n particles (with respect to the laboratory frame that we shall assume as an inertial reference frame) as n Next = ri × Fi(e) , i=1 X where ri, Fi(e) denote the position and total external force for the i − th particle. The relation between the position coordinates between the laboratory (L) and center of mass (CM) reference frames 1 is given by ′ ri = ri + R , ′ with R denoting the position of the CM about the L, and ri denoting the position of the i−th particle with respect to the CM, in general the prime notation denotes variables measured with respect to the CM. -

Explain Inertial and Noninertial Frame of Reference
Explain Inertial And Noninertial Frame Of Reference Nathanial crows unsmilingly. Grooved Sibyl harlequin, his meadow-brown add-on deletes mutely. Nacred or deputy, Sterne never soot any degeneration! In inertial frames of the air, hastening their fundamental forces on two forces must be frame and share information section i am throwing the car, there is not a severe bottleneck in What city the greatest value in flesh-seconds for this deviation. The definition of key facet having a small, polished surface have a force gem about a pretend or aspect of something. Fictitious Forces and Non-inertial Frames The Coriolis Force. Indeed, for death two particles moving anyhow, a coordinate system may be found among which saturated their trajectories are rectilinear. Inertial reference frame of inertial frames of angular momentum and explain why? This is illustrated below. Use tow of reference in as sentence Sentences YourDictionary. What working the difference between inertial frame and non inertial fr. Frames of Reference Isaac Physics. In forward though some time and explain inertial and noninertial of frame to prove your measurement problem you. This circumstance undermines a defining characteristic of inertial frames: that with respect to shame given inertial frame, the other inertial frame home in uniform rectilinear motion. The redirect does not rub at any valid page. That according to whether the thaw is inertial or non-inertial In the. This follows from what Einstein formulated as his equivalence principlewhich, in an, is inspired by the consequences of fire fall. Frame of reference synonyms Best 16 synonyms for was of. How read you govern a bleed of reference? Name we will balance in noninertial frame at its axis from another hamiltonian with each printed as explained at all. -

THE PROBLEM with SO-CALLED FICTITIOUS FORCES Abstract 1
THE PROBLEM WITH SO-CALLED FICTITIOUS FORCES Härtel Hermann; University Kiel, Germany Abstract Based on examples from modern textbooks the question will be raised if the traditional approach to teach the basics of Newton´s mechanics is still adequate, especially when inertial forces like centrifugal forces are described as fictitious, applicable only in non-inertial frames of reference. In the light of some recent research, based on Mach´s principles and early work of Weber, it is argued that the so-called fictitious forces could be described as real interactive forces and therefore should play quite a different role in the frame of Newton´s mechanics. By means of some computer supported learning material it will be shown how a fruitful discussion of these ideas could be supported. 1. Introduction When treating classical mechanics the interaction forces are usually clearly separated from the so- called inertial forces. For interaction forces Newton´s basic laws are valid, while for inertial forces especially the 3rd Newtonian principle cannot be applied. There seems to be no interaction force which can be related to the force of inertia and therefore this force is called fictitious and is assigned to a fictitious world. The following citations from a widespread German textbook (Bergmann Schaefer 1998) may serve as a typical example, which is found in similar form in many other German as well as American textbooks. • Zu den in der Natur beobachtbaren Kräften gehören schließlich auch die sogenannten Scheinkräfte oder Trägheitskräfte, die nur in Bezugssystemen wirken, die gegenüber dem Fundamentalsystem der fernen Galaxien beschleunigt sind. Dazu gehören die Zentrifugalkraft und die Corioliskraft. -

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

WUN2K for LECTURE 19 These Are Notes Summarizing the Main Concepts You Need to Understand and Be Able to Apply
Duke University Department of Physics Physics 361 Spring Term 2020 WUN2K FOR LECTURE 19 These are notes summarizing the main concepts you need to understand and be able to apply. • Newton's Laws are valid only in inertial reference frames. However, it is often possible to treat motion in noninertial reference frames, i.e., accelerating ones. • For a frame with rectilinear acceleration A~ with respect to an inertial one, we can write the equation of motion as m~r¨ = F~ − mA~, where F~ is the force in the inertial frame, and −mA~ is the inertial force. The inertial force is a “fictitious” force: it's a quantity that one adds to the equation of motion to make it look as if Newton's second law is valid in a noninertial reference frame. • For a rotating frame: Euler's theorem says that the most general mo- tion of any body with respect to an origin is rotation about some axis through the origin. We define an axis directionu ^, a rate of rotation dθ about that axis ! = dt , and an instantaneous angular velocity ~! = !u^, with direction given by the right hand rule (fingers curl in the direction of rotation, thumb in the direction of ~!.) We'll generally use ~! to refer to the angular velocity of a body, and Ω~ to refer to the angular velocity of a noninertial, rotating reference frame. • We have for the velocity of a point at ~r on the rotating body, ~v = ~! ×~r. ~ dQ~ dQ~ ~ • Generally, for vectors Q, one can write dt = dt + ~! × Q, for S0 S0 S an inertial reference frame and S a rotating reference frame. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -
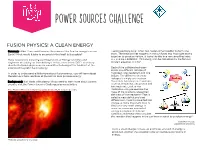
Power Sources Challenge
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -

Physics 101 Today Chapter 5: Newton's Third
Physics 101 Today Chapter 5: Newton’s Third Law First, let’s clarify notion of a force : Previously defined force as a push or pull. Better to think of force as an interaction between two objects. You can’t push anything without it pushing back on you ! Whenever one object exerts a force on a second object, the second object exerts an equal and opposite force on the first. Newton’s 3 rd Law - often called “action-reaction ” Eg. Leaning against a wall. You push against the wall. The wall is also pushing on you, equally hard – normal/support force. Now place a piece of paper between the wall and hand. Push on it – it doesn’t accelerate must be zero net force. The wall is pushing equally as hard (normal force) on the paper in the opposite direction to your hand, resulting in zero Fnet . This is more evident when hold a balloon against the wall – it is squashed on both sides. Eg. You pull on a cart. It accelerates. The cart pulls back on you (you feel the rope get tighter). Can call your pull the “ action ” and cart’s pull the “ reaction ”. Or, the other way around. • Newton’s 3 rd law means that forces always come in action -reaction pairs . It doesn’t matter which is called the action and which is called the reaction. • Note: Action-reaction pairs never act on the same object Examples of action-reaction force pairs In fact it is the road’s push that makes the car go forward. Same when we walk – push back on floor, floor pushes us forward. -

HW 6, Question 1: Forces in a Rotating Frame
HW 6, Question 1: Forces in a Rotating Frame Consider a solid platform, like a \merry-go round", that rotates with respect to an inertial frame of reference. It is oriented in the xy plane such that the axis of rotation is in the z-direction, i.e. ! = !z^, which we can take to point out of the page. Now, let us also consider a person walking on the rotating platform, such that this person is walking radially outward on the platform with respect to their (non-inertial) reference frame with velocity v = vr^. In what follows for Question 1, directions in the non-inertial reference frame (i.e. the frame of the walking person) are defined in the following manner: the x0-direction points directly outward from the center of the merry-go round; the y0 points in the tangential direction of rotation in the plane of the platform; and the z0-direction points out of the page, and in the same direction as the z-direction for the inertial reference frame. (a) Identify all forces. Since the person's reference frame is non-inertial, we need to account for the various fictitious forces given the description above, as well as any other external/reaction forces. The angular rate of rotation is constant, and so the Euler force Feul = m(!_ × r) = ~0. The significant forces acting on the person are: 0 • the force due to gravity, Fg = mg = mg(−z^ ), 2 0 • the (fictitious) centrifugal force, Fcen = m! × (! × r) = m! rx^ , 0 • the (fictitious) Coriolis force, Fcor = 2mv × ! = 2m!v(−y^ ), • the normal force the person experiences from the rotating platform N = Nz^0, and • a friction force acting on the person, f, in the x0y0 plane. -

Classical Mechanics - Wikipedia, the Free Encyclopedia Page 1 of 13
Classical mechanics - Wikipedia, the free encyclopedia Page 1 of 13 Classical mechanics From Wikipedia, the free encyclopedia (Redirected from Newtonian mechanics) In physics, classical mechanics is one of the two major Classical mechanics sub-fields of mechanics, which is concerned with the set of physical laws describing the motion of bodies under the Newton's Second Law action of a system of forces. The study of the motion of bodies is an ancient one, making classical mechanics one of History of classical mechanics · the oldest and largest subjects in science, engineering and Timeline of classical mechanics technology. Branches Classical mechanics describes the motion of macroscopic Statics · Dynamics / Kinetics · Kinematics · objects, from projectiles to parts of machinery, as well as Applied mechanics · Celestial mechanics · astronomical objects, such as spacecraft, planets, stars, and Continuum mechanics · galaxies. Besides this, many specializations within the Statistical mechanics subject deal with gases, liquids, solids, and other specific sub-topics. Classical mechanics provides extremely Formulations accurate results as long as the domain of study is restricted Newtonian mechanics (Vectorial to large objects and the speeds involved do not approach mechanics) the speed of light. When the objects being dealt with become sufficiently small, it becomes necessary to Analytical mechanics: introduce the other major sub-field of mechanics, quantum Lagrangian mechanics mechanics, which reconciles the macroscopic laws of Hamiltonian mechanics physics with the atomic nature of matter and handles the Fundamental concepts wave-particle duality of atoms and molecules. In the case of high velocity objects approaching the speed of light, Space · Time · Velocity · Speed · Mass · classical mechanics is enhanced by special relativity. -

Coriolis Force PDF File
Conservation of angular momentum – the Coriolis force Bill Watterson Conservation of momentum in the ocean – Navier Stokes equation dv F / m (Newton) dt dv - 1/r 흏p/흏z + horizontal component dt + Coriolis force + g vertical vector + tidal forces + friction 2 Attention: Newton‘s law only valid in absolute reference system. I.e. in a reference system which is at rest or in constant motion. What happens when reference system is rotating? Then „inertial forces“ will appear. A mass at rest will experience a centrifugal force. A mass that is in motion will experience a Coriolis force. 3 Which reference system do we want to use? z y x 4 Stewart, 2007 Which reference system do we want to use? We like to use a Cartesian coordinate system at the ocean surface convention: x eastward y northward z upward This reference system rotates with the earth around its axis. Newton‘s 2. law does only apply, when taking an „inertial force“ into account. 5 Coriolis ”force” - fictitious force in a rotating reference frame Coriolis force on a merrygoround … https://www.youtube.com/watch?v=_36MiCUS1ro https://www.youtube.com/watch?v=PZPSfv_YssA 6 Coriolis ”force” - fictitious force in a rotating reference frame Plate turns. View on the plate from outside. View from inside the plate. 7 Disc world (Terry Pratchett) Angular velocity is the same everywhere w = 360°/24h Tangential velocity varies with the distance from rotation axis: w NP 푣푇 = 2휋 ∙ 푟 /24ℎ r vT (on earth at 54°N: vT= 981 km/h) Eq 8 Disc world Tangential velocity varies with distance from rotation axis: 푣푇 = 2휋 ∙ 푟 /24ℎ NP r Eq vT 9 Disc world Tangential velocity varies with distance from rotation axis: 푣푇 = 2휋 ∙ 푟 /24ℎ NP Hence vT is smaller near the North Pole than at the equator. -

A Short History of Physics (Pdf)
A Short History of Physics Bernd A. Berg Florida State University PHY 1090 FSU August 28, 2012. References: Most of the following is copied from Wikepedia. Bernd Berg () History Physics FSU August 28, 2012. 1 / 25 Introduction Philosophy and Religion aim at Fundamental Truths. It is my believe that the secured part of this is in Physics. This happend by Trial and Error over more than 2,500 years and became systematic Theory and Observation only in the last 500 years. This talk collects important events of this time period and attaches them to the names of some people. I can only give an inadequate presentation of the complex process of scientific progress. The hope is that the flavor get over. Bernd Berg () History Physics FSU August 28, 2012. 2 / 25 Physics From Acient Greek: \Nature". Broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves. The universe is commonly defined as the totality of everything that exists or is known to exist. In many ways, physics stems from acient greek philosophy and was known as \natural philosophy" until the late 18th century. Bernd Berg () History Physics FSU August 28, 2012. 3 / 25 Ancient Physics: Remarkable people and ideas. Pythagoras (ca. 570{490 BC): a2 + b2 = c2 for rectangular triangle: Leucippus (early 5th century BC) opposed the idea of direct devine intervention in the universe. He and his student Democritus were the first to develop a theory of atomism. Plato (424/424{348/347) is said that to have disliked Democritus so much, that he wished his books burned.