Transit Vehicles: a Technoecono&/Hc and Market Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

28. Oktober 2012
timing & results: mika timing 28. Oktober 2012 www.mikatiming.de Läufer Männer Stand / printed 28.10.2012 16:53:40 Men Platz SNR Klasse Kl.Pl Halb I Halb II Ziel Ziel Place BIB Name Verein/Ort NAT Class Cl.Pl Half I Half II netto brutto 1 2 Makau, Patrick -/- KEN MH 1 1:02:55 1:03:14 2:06:08 2:06:08 2 7 Edae, Deressa Chimsa -/- ETH M35 1 1:02:52 1:04:01 2:06:52 2:06:52 3 6 Kirwa, Gilbert -/- KEN MH 2 1:02:52 1:04:44 2:07:35 2:07:35 4 12 Some, Peter Kimeli -/- KEN MH 3 1:02:54 1:05:36 2:08:29 2:08:29 5 5 Worku, Bazu -/- ETH MH 4 1:02:53 1:05:43 2:08:35 2:08:35 6 3 Matebor, Albert -/- KEN M30 1 1:02:52 1:06:01 2:08:53 2:08:53 7 41 Kipchirchir, Victor -/- KEN MH 5 1:02:52 1:06:22 2:09:13 2:09:13 8 8 Legesse, Shume Hailu -/- ETH MH 6 1:05:14 1:04:48 2:10:01 2:10:01 9 10 Bane, Tola -/- ETH MH 7 1:05:14 1:05:45 2:10:58 2:10:58 10 26 Beyn, Isaias Habtemicael -/- ERI MH 8 1:05:13 1:06:41 2:11:53 2:11:53 11 23 Ghebrekal, Ogubit Ghebrengus-/- ERI MH 9 1:05:14 1:07:01 2:12:14 2:12:14 12 20 Kigen, Wilfred -/- KEN M35 2 1:05:15 1:07:09 2:12:23 2:12:23 13 24 Berhane, Oqubit LC Fortuna SUI/- ERI M30 2 1:05:14 1:08:22 2:13:35 2:13:35 14 15 Abate, Wondimnew Melkamu-/- ETH MH 10 1:05:14 1:08:42 2:13:55 2:13:55 15 25 Bahle, Debesay Tsige -/- ERI MH 11 1:05:14 1:08:44 2:13:57 2:13:57 16 30 Kah, Sören LG Lahn-Aar Esterau/- M30 3 1:06:46 1:07:12 2:13:57 2:13:57 17 36 Brzezinski, Blazej -/- POL MH 12 1:05:15 1:08:47 2:14:01 2:14:01 18 28 Hawkins, Derek -/- GBR MH 13 1:07:33 1:06:31 2:14:04 2:14:04 19 16 Gemeda, Feyera -/- ETH MH 14 1:04:33 1:09:41 2:14:13 2:14:13 -
Introduction of Electronic Commerce
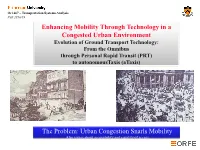
Orf 467 – Transportation Systems Analysis Fall 2018/19 Enhancing Mobility Through Technology in a Congested Urban Environment Evolution of Ground Transport Technology: From the Omnibus through Personal Rapid Transit (PRT) to autonomousTaxis (aTaxis) The Problem: Urban Congestion Snarls Mobility Also issues about accessibility and equality of access Orf 467 – Transportation Systems Analysis Fall 2018/19 Over the years technology has evolved… From: To: Omnibus on Blackfriar’s Bridge, 1798 Hummers ~2007 (Pre Crisis) To: Prius & Tesla 2017 (?????) To: GoogleCars ~ 2017+ ??? Orf 467 – Transportation Systems Analysis Fall 2018/19 Evolution of the OmniBus for intra-urban mass transportation Start: Geo Enhancement: London,1798 NYC, 1830 Technology Elements: • Capacity: ~10 Seated Passengers • Propulsion: Horses or Mules • Externalities: Disease and non-operating revenue from pollution • Suspension: Steel Sprung Wooden Wheel with solid axel • Way: “Flat” Pavement (stone, wood, compacted earth) • Headway & Lateral Control: Human Capacity Enhancement: Propulsion Enhancement: Support Enhancement: Double Decker, London Steam, London Iron (Steel) Rails Orf 467 – Transportation Systems Analysis Fall 2018/19 Growth of Horse-Drawn Street Railway Technology 1850: NYC 1860: London 1875: Minneapolis 1890: Broadway NYC 1908: Washington , GA Week 8 Orf 467 – Transportation Systems Analysis Fall 2018/19 Evolution of Horse-Drawn Street Railway Technology Today: DisneyWorld Orf 467 – Transportation Systems Analysis Fall 2018/19 Growth of Cable Street Railway Technology -

Sandspur, Vol 118, No 02, September 08, 2011
University of Central Florida STARS The Rollins Sandspur Newspapers and Weeklies of Central Florida 9-8-2011 Sandspur, Vol 118, No 02, September 08, 2011 Rollins College Find similar works at: https://stars.library.ucf.edu/cfm-sandspur University of Central Florida Libraries http://library.ucf.edu This Newspaper is brought to you for free and open access by the Newspapers and Weeklies of Central Florida at STARS. It has been accepted for inclusion in The Rollins Sandspur by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Rollins College, "Sandspur, Vol 118, No 02, September 08, 2011" (2011). The Rollins Sandspur. 1939. https://stars.library.ucf.edu/cfm-sandspur/1939 hW CENTERSPREAD f+i Thefit: m SandspuThursday, Septemberr 8, 2011 Volume 118, Issue 2 • • Thursday, September £ thesandspur.org Florida's Oldest College Newspaper, Est. 1894 ASSOCIATED PRESS The Rollins community weighs in on the aftermath of the 2001 terrorist attacks. ARTS ASSOCIATED PRESS Katy Perry accepts her awards at the MTV Video Music Awards on Aug. 28. Annamarie Carlson nity needs and opportunities on campus will host the 9/11 the anniversary of 9/11 by vol News Editor and to promote progress, jus National Requiem of Remem untarily pledging to perform tice, learning and growth. brance at 3 p.m. on Sunday, good deeds, support charitable Ever since 9/11, the month During the weekend of the Sept. 11 in Knowles Chapel. causes, volunteer and engage in QUOTABLE of September has had a unique 10th anniversary of 9/11, two This concert is being performed other acts of compassion - hon i€ They claim that they connotation in the minds of service projects — both on Sat. -
AUDIO + VIDEO 4/13/10 Audio & Video Releases *Click on the Artist Names to Be Taken Directly to the Sell Sheet
NEW RELEASES WEA.COM ISSUE 07 APRIL 13 + APRIL 20, 2010 LABELS / PARTNERS Atlantic Records Asylum Bad Boy Records Bigger Picture Curb Records Elektra Fueled By Ramen Nonesuch Rhino Records Roadrunner Records Time Life Top Sail Warner Bros. Records Warner Music Latina Word AUDIO + VIDEO 4/13/10 Audio & Video Releases *Click on the Artist Names to be taken directly to the Sell Sheet. Click on the Artist Name in the Order Due Date Sell Sheet to be taken back to the Recap Page Street Date CD- NON 521074 ALLEN, TONY Secret Agent $18.98 4/13/10 3/24/10 CD- RAA 523695 BECK, JEFF Emotion & Commotion $18.98 4/13/10 3/24/10 CD- ATL 521144 CASTRO, JASON Jason Castro $9.94 4/13/10 3/24/10 DV- WRN 523924 CUMMINS, DAN Crazy With A Capital F (DVD) $16.95 4/13/10 3/17/10 CD- ASW 523890 GUCCI MANE Burrrprint (2) HD $13.99 4/13/10 3/24/10 CD- LAT 524047 MAGO DE OZ Gaia III - Atlantia $20.98 4/13/10 3/24/10 CD- MERCHANT, NON 522304 NATALIE Leave Your Sleep (2CD) $24.98 4/13/10 3/24/10 CD- MERCHANT, Selections From The Album NON 522301 NATALIE Leave Your Sleep $18.98 4/13/10 3/24/10 CD- LAT 524161 MIJARES Vivir Asi - Vol. II $16.98 4/13/10 3/24/10 CD- STRAIGHT NO ATL 523536 CHASER With A Twist $18.98 4/13/10 3/24/10 4/13/10 Late Additions Street Date Order Due Date CD- ERP 524163 GLORIANA Gloriana $13.99 4/13/10 3/24/10 CD- MFL 524110 GREAVER, PAUL Guitar Lullabies $11.98 4/13/10 3/24/10 Last Update: 03/03/10 ARTIST: Tony Allen TITLE: Secret Agent Label: NON/Nonesuch Config & Selection #: CD 521074 Street Date: 04/13/10 Order Due Date: 03/24/10 Compact Disc UPC: 075597981001 Box Count: 30 Unit Per Set: 1 SRP: $18.98 Alphabetize Under: T File Under: World For the latest up to date info on this release visit WEA.com. -
Sunday Morning Grid 2/26/12 Latimes.Com/Tv Times
SUNDAY MORNING GRID 2/26/12 LATIMES.COM/TV TIMES 7 am 7:30 8 am 8:30 9 am 9:30 10 am 10:30 11 am 11:30 12 pm 12:30 2 CBS CBS News Face/Nation Rangers Horseland The Path to Las Vegas Epic Poker College Basketball Pittsburgh at Louisville. (N) Å 4 NBC News Å Meet the Press (N) Å News Laureus Sports Awards Golf Central PGA Tour Golf 5 CW News (N) Å In Touch Paid Program 7 ABC News (N) Å This Week News (N) Å News (N) Å News Å Eye on L.A. Award Preview 9 KCAL News (N) Prince Mike Webb Joel Osteen Shook Paid Program 11 FOX Hour of Power (N) (TVG) Fox News Sunday NASCAR Racing Sprint Cup: Daytona 500. From Daytona International Speedway, Fla. (N) Å 13 MyNet Paid Tomorrow’s Paid Program Best Buys Paid Program The Wedding Planner 18 KSCI Paid Hope Hr. Church Paid Program Iranian TV Paid Program 22 KWHY Paid Program Paid Program 24 KVCR Sid Science Curios -ity Thomas Bob Builder Joy of Paint Paint This Dewberry Wyland’s Sara’s Kitchen Kitchen Mexican 28 KCET Hands On Raggs Busytown Peep Pancakes Pufnstuf Land/Lost Hey Kids Taste Simply Ming Moyers & Company 30 ION Turning Pnt. Discovery In Touch Mark Jeske Beyond Paid Program Inspiration Today Camp Meeting 34 KMEX Paid Program Al Punto (N) Fútbol de la Liga Mexicana República Deportiva 40 KTBN Rhema Win Walk Miracle-You Redemption Love In Touch PowerPoint It Is Written B. Conley From Heart King Is J. -

Innovation in Public Transportation
W Co'" Sf*rts o* A DIRECTORY OF RESEARCH, DEVELOPMENT AND DEMONSTRATION PROJECTS Fiscal Year 1975 U.S. Department of Transportation Urban Mass Transportation Administration Washington, D.C. 20590 For sale by the Superintendent of Documents, U.S. Government Printing Office, Washington, D.C. 20402 - Price $1.80 Stock No. 050-014-00006-1 Introduction This annual publication contains descriptions of through contracts with private firms, or through tion Act of 1964, as amended. The principal current research, development and demonstration working agreements with other Federal depart- method of reporting is through annual publication (RD&D) projects sponsored and funded by the ments and agencies. UMTA generally initiates of the compilation of reports on the status of U.S. Department of Transportation's Urban Mass and plans these RD&D projects and performs individual projects. Transportation Administration (UMTA). analytical tasks as well. The volume dated June 30, 1972 constituted an These projects are conducted under the author- Research projects are intended to produce infor- historical record of all projects funded under the ity of Section 6(a) of the Urban Mass Transporta- mation about possible improvements in urban Act to that point as well as projects funded tion Act of 1964, as amended (78 Stat. 302, 49 mass transportation. The products of research earlier under authorization of the Housing Act of U.S.C. 1601 et. seq.). This statute authorizes the projects are reports or studies. 1961. This volume is available from the National Secretary of Transportation "to undertake re- Technical Information Service (NTIS), access num- Development projects involve fabrication, testing, search, development, and demonstration projects ber PB-2 13-228. -

Consciencialização Dos Operadores Turísticos Para a Consulta Do Viajante
Consciencialização dos Operadores Turísticos para a Consulta do Viajante 1 Sandra Cristina Coimbra do Nascimento Escola Superior de Comunicação Social – Instituto Politécnico de Lisboa Trabalho de Projeto Mestrado em Gestão Estratégica das Relações Públicas 2011 - 2013 2011 - 2013 Orientadora: Prof. Doutora Mafalda Eiró Gomes Escola Superior de Comunicação Social – Instituto Politécnico de Lisboa Projeto de Consciencialização dos Operadores Turísticos para a Consulta do Viajante | Sandra Nascimento Consciencialização dos Operadores Turísticos para a Consulta do Viajante Trabalho de Projeto Sandra Cristina Coimbra do Nascimento Escola Superior de Comunicação Social – Instituto Politécnico de Lisboa 2 Projeto de Consciencialização dos Operadores Turísticos para a Consulta do Viajante | Sandra Nascimento DECLARAÇÃO Declaro ser a autora deste trabalho, parte integrante das condições exigidas para a obtenção do grau de Mestre em Gestão Estratégica das Relações Públicas, que constitui um trabalho original e inédito que nunca foi submetido (no seu todo ou em qualquer das suas partes) a outra instituição de ensino superior para obtenção de um grau académico ou qualquer outra habilitação. Atesto ainda que todas as citações estão devidamente identificadas. Mais acrescento que tenho consciência de que o plágio poderá levar à anulação do trabalho agora apresentado. Lisboa, ___ de ___________ de 2013 3 Projeto de Consciencialização dos Operadores Turísticos para a Consulta do Viajante | Sandra Nascimento AGRADECIMENTOS A realização deste trabalho contribuiu claramente para o meu conhecimento sobre questões relacionadas com o Turismo em Portugal e o seu impacto cada vez maior a nível mundial, tornando-se numa das maiores fontes de riqueza para muitas economias. Mas acima de tudo despertou em mim um sentimento de solidariedade e compaixão para com aqueles que de tanta ajuda necessitam. -
Commissioner: We Can Do Better Lee Grose ‘Any Thought That Current Federal Land Lewis County Leader Tells Management Practices Could
Toledo School Leaders Considering Bond to Renovate High School / Main 4 $1 Reaching 110,000 Readers in Print and Online — www.chronline.com A Bright Future for the Big Bird Fundraising to Rehabilitate the Yard Bird Is Nearly Complete / Main 7 Midweek Edition Thursday, Feb. 28, 2013 Centralia Police Arrest Two in Connection With Vandalism Spree / Main 3 Commissioner: We Can Do Better Lee Grose ‘Any Thought That Current Federal Land Lewis County Leader Tells Management Practices Could ... Support Congress to Treat Federal Forest Local Government or Land More Like Washington Universities Is Folly’ State Treats Its Own — Lewis County Commissioner Lee Grose, Testifying Before / Main 4 Congress This Week The Chronicle, file photo The wire of a high lead logging operation extends down a hillside in the Giford Pinchot National Forest 26 miles south of Randle in October 2011. Lewis County Commissioner Lee Grose testiied before Congress this week, saying logging in the Giford Pinchot and other national forests generates just $5 per thousand board feet, compared with $308 per thousand board feet on state-managed lands. “The U.S. Forest Service is woefully behind the state,” Grose, a Packwood Republican, told the U.S. House of Representatives. ToledoTel Pro Changes in Olympia and D.C. Could Make Rural Phone Rodeo Service More Expensive, Returning to Local Telecom Execs Say Lewis County? / Main 6 / Main 14 The Chronicle, Serving The Greater Weather On the Web Deaths Lewis County Area Since 1889 TONIGHT: Low 43 VIDEO: Perkins, William John, Follow Us on Twitter TOMORROW: High 57 Lewis County 89, Centralia @chronline Rain Likely Commissioner Wharton, Edward see details on page Main 2 Lee Grose “Eddie,” 84, Find Us on Facebook Testifies During Rochester www.facebook.com/ Weather picture by Garren Congressional Derango, Lisa A. -
Health Care Application Lengthy Process
BLACK SMOKE: WIDE OPEN NO POPE YET SEC TOURNEY Cardinals hold first Florida only ranked conclave vote, PAGE 8A team, SPORTS, PAGE 1B The Wednesday Gleaner March 13, 2013 HENDERSON, KENTUCKY © No. 62, 129th year 75¢ Health care application lengthy process ■■Federal plan requires 21 steps, covers 15 pages By Ricardo Alonso-Zaldivar at Amazon or Travelocity is starting money part, actually picking a health Associated Press to look like wishful thinking. plan will require additional steps, At least three major federal agen- plus a basic understanding of insur- WASHINGTON — Applying for benefits cies, including the IRS, will scru- ance jargon. under President Barack Obama’s tinize your application. Checking And it’s a mandate, not a sug- health care overhaul could be as your identity, income and citizen- gestion. The law says virtually all daunting as doing your taxes. ship is supposed to happen in real Americans must carry health insur- The government’s draft applica- time, if you apply online. ance starting next year, although tion runs 15 pages for a three-person That’s just the first part of the most will just keep the coverage family. An outline of the online ver- process, which lets you know if they now have through their jobs, sion has 21 steps, some with addi- you qualify for financial help. The Medicare or Medicaid. tional questions. government asks to see what you’re Some are concerned that a lot Seven months before the Oct. 1 making because Obama’s Affordable of uninsured people will be over- J. DAVID AKE / ASSOCIATED PRESS start of enrollment season for mil- Care Act is means-tested, with low- whelmed and simply give up. -

Issue 8: May 6, 2009
may 6, 2009 [email protected] LSHS alhallaVolume 81, Issue 8 Molester on the loose!“ vBeau Castillo Sports Editor “I felt shocked, I know [the Students are safe at Lake Stevens High victim personally]. I didn’t ex- School, but when they leave campus, the sense pect [this event] to happen,” of [the school] being able to keep them safe junior Zebual Parker, a close friend of the family said. On and secure doesn’t extend April 14, our community was -Ken Collins shocked to learn about a moles- tation that occurred on Grade “measures into their system perspective the importance of Road, near 30th street N.E. with intentions of creating a security, including extra secu- The suspect approached safer environment. “Our school rity measures during a time of the 14 year-old female and district did an out dial for all uncertainty. grabbed her breast. Naturally, of our students, which would As a result of this inci- the victim and her friend be- include everyone in the neigh- dent, many students realize gan screaming, which forced borhood [where the incident that, in any given situation, you the suspect to flee from the vi- occurred],” Collins said. In re- shouldn’t have a false sense of cinity. Following the incident, sponse to the event, school of- security. “[This event] defi- school officials at Mt. Pilchuck ficials stressed the importance nitely makes me want to be and Highland elementary of the situation by emphasiz- more on my guard. It makes schools took precautionary ing that the suspect was still me feel unsafe [knowing] measures and canceled three on the run; the out dial spe- there are more sexual preda- bus routes, allowing officials cifically aimed at making par- tors around,” senior Laura Ev- to safely scour the area for the ents aware. -

Montgomery Community Television
2010 3rd Quarter Report January 1, 2010 – March 31, 2010 7548 Standish Place Rockville, MD 20855 301-424-1730 Access Montgomery Television 2 Third Quarter Report FY‟10 PRODUCTION SERVICES The third quarter of FY10 saw several production ideas make it to air. Content produced this quarter informed and encouraged participation in the 2010 census, a one hour special addressing the numerous transportation issues affecting the region and a sports special highlighting the athletic achievements of county seniors. In addition, AMTV‟s environmental program, “Think Green” continues to educate viewers on the importance of “living green.” Client produced “Coming Attractions” kept audiences entertained with stories about Montgomery County‟s vibrant arts community. Production continued its commitment to inform viewers of its many programs by producing both generic and topical promos, as well as promos highlighting AMTV. At the end of the 3rd quarter AMTV has produced over 38 hours of programming this fiscal year. Coming Attractions Production of “Coming Attractions” continues to bring viewers the best in arts and arts related projects in Montgomery County. This quarter‟s episodes included interviews with the founder of Contradiction Dance, a company that mixes the art of dance with the narrative of contemporary society; a profile of Ron Kemp, a street performer who uses music as a healer; and a discussion on the fiscal challenges facing county arts organizations. The quarter rounded out with a profile of the many tourist attractions in the county, a discussion with the Home School Network, a non-profit that provides cultural arts programs to home school students; and an interview with the Finest Youth Performance Troupe. -
Feasibility of Personal Rapid Transit in Ithaca, New York: Final Report
FEASIBILITY OF PERSONAL RAPID TRANSIT IN ITHACA, NEW YORK Final Report Prepared for THE NEW YORK STATE ENERGY RESEARCH AND DEVELOPMENT AUTHORITY Albany, NY Joseph D. Tario, P.E. Senior Project Manager and THE NEW YORK STATE DEPARTMENT OF TRANSPORTATION Albany, NY Gary Frederick, P.E. Office of Technical Services, Director Prepared by C&S ENGINEERS, INC. Syracuse, NY Aileen Maguire Meyer, P.E., AICP Principal Investigator and CONNECT ITHACA Ithaca, NY Robert Morache Principal Investigator Contract Nos. 11101 / C-08-25 September 2010 [blank] NOTICE This report was prepared by C&S Engineers, Inc. and Connect Ithaca in the course of performing work contracted for and sponsored by the New York State Energy Research and Development Authority and the New York State Department of Transportation (hereafter the “Sponsors”). The opinions expressed in this report do not necessarily reflect those of the Sponsors or the State of New York, and reference to any specific product, service, process, or method does not constitute an implied or expressed recommendation or endorsement of it. Further, the Sponsors and the State of New York make no warranties or representations, expressed or implied, as to the fitness for particular purpose or merchantability of any product, apparatus, or service, or the usefulness, completeness, or accuracy of any processes, methods, or other information contained, described, disclosed, or referred to in this report. The Sponsors, the State of New York, and the contractor make no representation that the use of any product, apparatus, process, method, or other information will not infringe privately owned rights and will assume no liability for any loss, injury, or damage resulting from, or occurring in connection with, the use of information contained, described, disclosed, or referred to in this report.