Supporting Safe and Secure Drone Operations in Europe
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Global Urban Air Mobility Project Report 7 March, 2019
(Picture: Volocopter and Frankfurt Airport are now working on airport-city centre air taxi concepts) The Global Urban Air Mobility project report 7 March, 2019 Europe Belgium Antwerp joined the UAM Initiative (EIP-SCC) in September 2018. According to a press release: “Antwerp has stated its ambition to explore the potential of drones in an urban context. As a starting point, the feasibility of using drones for observation tasks by the local police will be studied. Specifically, the city of Antwerp and its local police will initiate a project definition aimed at developing an autonomous aerial imaging system with the ability to cover the territory of the city. In the development of the project, the city will also closely involve its quadruple helix partners (universities-businesses-citizens) and embed the initiative in its wider Smart City strategy.” “The feasibility of implementing this solution will be studied in close collaboration with institutional partners such as Belgocontrol, Eurocontrol and the European Aviation Safety Agency (EASA). Among other partners who have signed and support the Manifesto of Intent are the Antwerp Fire Department, the Federal Ministry of Transport, the Belgian Civil Aviation Authority, the Federal Police (Air Support), the Port of Antwerp, iMec, University of Antwerp, Drone Think Do, Droneport, EUKA, Helicus and Unifly. Meanwhile in October 2018 it was announced that the Helicus Aero Initiative (HAI) will put in place a system to transport medical supplies by drones between hospitals and laboratories/pharmacies. The project, named MEDRONA, was selected for funding by the federal government. Inter hospital test flights will take place during the second part of 2019 in Antwerp urban airspace. -

Issue 2 – 2018
BULLETIN AEROSPACE EUROPE INTERVIEW WITH FLORIAN GUILLERMET EXECUTIVE DIRECTOR OF SESAR JOINT UNDERTAKING June 2018 / The Bulletin of the European Aerospace Community / ww.ceas.org COUNCIL OF EUROPEAN AEROSPACE SOCIETIES LIFE OF CEAS AEROSPACE EUROPE CEAS WHAT DOES CEAS OFFER YOU ? The Council of European Aerospace Societies (CEAS) is KNOWLEDGE TRANSFER: an International Non-Profit Organisation, with the aim to n A structure for Technical Committees develop a framework within which the major European Aerospace Societies can work together. HIGH-LEVEL EUROPEAN CONFERENCES: It was established as a legal entity conferred under Bel- n Technical pan-European events dealing with specific gium Law on 1st of January 2007. The creation of this disciplines Council was the result of a slow evolution of the ‘Confe- n The biennial AEROSPACE EUROPE Conference deration’ of European Aerospace Societies which was born fifteen years earlier, in 1992, with three nations only PUBLICATIONS: at that time: France, Germany and the UK. n CEAS Aeronautical Journal It currently comprises: n CEAS Space Journal n 12 Full Member Societies: 3AF (France), AIAE (Spain), n AEROSPACE EUROPE Bulletin AIDAA (Italy), AAAR (Romania), CzAeS (Czech Republic), DGLR (Germany), FTF (Sweden), NVvL (The Nether- RELATIONSHIPS AT EUROPEAN LEVEL: lands), PSAA (Poland), RAeS (United Kingdom), SVFW n European Parliament ( Switzerland) and TsAGI (Russia); n European Commission n 4 Corporate Members: ESA, EASA, EUROCONTROL and n ASD, EASA, EDA, ESA, EUROCONTROL, OCCAR EUROAVIA; n 7 Societies -
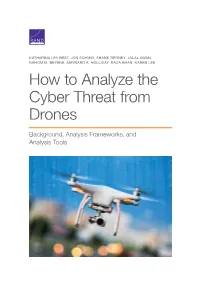
How to Analyze the Cyber Threat from Drones
C O R P O R A T I O N KATHARINA LEY BEST, JON SCHMID, SHANE TIERNEY, JALAL AWAN, NAHOM M. BEYENE, MAYNARD A. HOLLIDAY, RAZA KHAN, KAREN LEE How to Analyze the Cyber Threat from Drones Background, Analysis Frameworks, and Analysis Tools For more information on this publication, visit www.rand.org/t/RR2972 Library of Congress Cataloging-in-Publication Data is available for this publication. ISBN: 978-1-9774-0287-5 Published by the RAND Corporation, Santa Monica, Calif. © Copyright 2020 RAND Corporation R® is a registered trademark. Cover design by Rick Penn-Kraus Cover images: drone, Kadmy - stock.adobe.com; data, Getty Images. Limited Print and Electronic Distribution Rights This document and trademark(s) contained herein are protected by law. This representation of RAND intellectual property is provided for noncommercial use only. Unauthorized posting of this publication online is prohibited. Permission is given to duplicate this document for personal use only, as long as it is unaltered and complete. Permission is required from RAND to reproduce, or reuse in another form, any of its research documents for commercial use. For information on reprint and linking permissions, please visit www.rand.org/pubs/permissions. The RAND Corporation is a research organization that develops solutions to public policy challenges to help make communities throughout the world safer and more secure, healthier and more prosperous. RAND is nonprofit, nonpartisan, and committed to the public interest. RAND’s publications do not necessarily reflect the opinions of its research clients and sponsors. Support RAND Make a tax-deductible charitable contribution at www.rand.org/giving/contribute www.rand.org Preface This report explores the security implications of the rapid growth in unmanned aerial systems (UAS), focusing specifically on current and future vulnerabilities. -
Fifth FP7 Monitoring Report
Fifth FP7 Monitoring Report MONITORING REPORT 2011 29/08/2012 TABLE OF CONTENTS 0 EXECUTIVE SUMMARY .......................................................................... 1 1 INTRODUCTION .................................................................................. 2 2 FP7 PARTICIPATION PATTERNS IN 2011 ................................................ 4 2.1 Overall participation ........................................................................ 4 2.1.1 Calls, proposals, applicants and corresponding success rates ...................... 5 2.1.2 Project costs, requested EU contribution and corresponding success rates ... 5 2.1.3 Signed grant agreements, participants and EU contribution ........................ 9 2.2 Participation by funding scheme...................................................... 9 2.3 Participation by type of organisation ............................................. 10 2.3.1 Academia participation ......................................................................... 12 2.3.2 Participation of research organisations.................................................... 13 2.3.3 Industry participation ........................................................................... 13 2.4 International and regional dimensions of FP7 ............................... 17 2.4.1 EU Member States ............................................................................... 18 2.4.2 Candidate and Associated Countries ....................................................... 20 2.4.3 Third Countries ................................................................................... -
Single Programming Document 2020-2022
SESAR JOINT UNDERTAKING Single Programming Document 2020-2022 Edition date: 17 December 2019 Edition: 01.00 Status: Approved Abstract This document is the Single Programming Document of the SESAR Joint Undertaking (SESAR JU) for the 2020-2022 period. It provides multi-annual (2020 to 2022) and annual (2020) programming components and forms the multi-annual and annual work programmes of the SESAR JU. Once adopted, this Single Programming Document will replace the Single Programming Document 2019-2021 insofar as it refers to the years 2020 and 2021. FINAL DOCUMENT EDITION 01.00 © SESAR Joint Undertaking, 2019 Reproduction is authorised, provided the source is acknowledged. For any use or reproduction of photos or other material, permission must be sought directly from the copyright holder. PDF: ISBN 978-92-9216-122-4 doi: 10.2829/51363 Catalogue number: MG-04-19-437-EN-N 2 © –2019– SESAR JU Approved SINGLE PROGRAMMING DOCUMENT 2020-2022 Contents Abstract ................................................................................................................................... 1 Foreword .......................................................................................................................... 5 Document history ............................................................................................................. 6 List of acronyms and definitions ........................................................................................ 9 Mission Statement ......................................................................................................... -

Glossary Term Definition 3Di Three Dimension
Glossary Term Definition 3Di Three dimension inefficiency score, a metric that incorporates flight path inefficiencies. ACOG Airspace Change Organising Group – the organisation that is commissioned by the DfT and CAA with coordinating and project managing the airspace changes needed to modernise the UK’s airspace (see AMS). AdP Aéroports de Paris ADS-B Automatic dependent surveillance – broadcast system. This is a surveillance technology in which an aircraft determines its position via satellite navigation and periodically broadcasts it, enabling the aircraft to be tracked independent of traditional radar. The receivers for ADS-B signals have to date been land-based. AENA Spanish company, 52% state-owned and 49% traded, that manages airports and heliports in Spain, and through a subsidiary has interests in the operation of 17 airports worldwide. Aireon Aireon manufactures, deploys, and operates a global aircraft LLC tracking and surveillance system, utilising satellite-based receivers to monitor the existing ADS-B transmissions of aircraft, for global air traffic surveillance. AIS The Aeronautical Information Service (AIS). NERL provides the Aeronautical Information Service as a specified service under its Licence. ANSP Air navigation services provider. Standard term for the organisations that provide Air Traffic Control services within a state or region. ATC Air Traffic Control Glos-1 ATCOs Air Traffic Control Officers are trained and licensed personnel responsible for the safe, orderly, and expeditious flow of air traffic in the global air traffic control system. ATM Air traffic management Beta (or β) A firm-specific measure of investors’ exposure to systematic risk C1 Average minutes of en route air traffic flow management delay attributable to air navigation services. -
Safety at the Interfaces: Collaboration at Work
EDITORIAL HindThe ability or opportunity to understand and judge an event or experience after it has occurred ight26 EUROCONTROL SAFETY AT THE INTERFACES: COLLABORATION AT WORK THE VOICE OF AN ANGEL HOW FIERCE COMPETITORS by Sidney Dekker JOINED FORCES TO MAKE OFFSHORE HELICOPTER FROM EXPERIENCE OPERATIONS SAFER REPORTS TO EXPERIENCE by Gretchen Haskins SHARING Plus much more on collaboration by Erick Hoarau, Florence-Marie Jégoux within and between organisations and Sébastien Follet COLLABORATIVE ADAPTATION IN A CONSTRAINED SYSTEM by Don Gyles and Chris Bearman Winter 2017 Winter FOREWORD Dear readers, The Network Manager works with 43 countries, over 500 airports and around 2,000 aircraft operators, as well as with the military and our aviation neighbours in other continents. So it is no surprise that collaboration is essential in everything we do. It’s never boring, frequently surprising and often a challenge. However, it can be very rewarding to build the relationships required and then to see them result in practical steps to improve the performance of European aviation, something that is vital as traffic is now clearly growing again. We have seen record numbers this year, with nearly 36 thousand flights on a single day. Over the whole year, we expect to handle around 10.6 million flights. In practice, this collaboration means maintaining effective working relationships with every Air Navigation Service Provider (ANSP) across Europe. We look at their performance, at their plans and at the forecast traffic levels; then we discuss how issues can be resolved, before they cause problems. Sometimes that means spending a lot of time with a particular country to see how to overcome a particular challenge. -

Brexit: New Guidelines on the Framework for Future EU-UK Relations
BRIEFING PAPER Number 8289, 19 April 2018 Brexit: new guidelines on By Library subject the framework for future specialists EU-UK relations Contents: 1. The new guidelines: background 2. Economic relationship 3. Climate change, sustainable development and cross- border pollution 4. Reciprocal access to fishing waters 5. Free movement 6. Transport 7. UK participation in EU agencies and programmes 8. Regulatory alignment and adherence to standards 9. Enforcement and dispute settlement 10. Other areas of cooperation 11. Areas of agreement and disagreement www.parliament.uk/commons-library | intranet.parliament.uk/commons-library | [email protected] | @commonslibrary 2 Brexit: new guidelines on the framework for future EU-UK relations Contents Summary 5 1. The new guidelines: background 8 1.1 The Article 50 process 8 Drafts and revisions 8 New guidelines are adopted 9 General principles are retained 10 1.2 Political Declaration on the framework for future relations 10 What will be in it? 10 Not legally binding 11 2. Economic relationship 12 2.1 Ambitious and wide-ranging free trade agreement 12 2.2 Trade in goods 14 2.3 Appropriate customs cooperation 16 2.4 Technical barriers to trade and SPS measures 17 2.5 Voluntary regulatory cooperation 20 2.6 Trade in services 20 2.7 Public procurement markets 24 2.8 Investments 27 2.9 Protection of intellectual property rights 29 3. Climate change, sustainable development and cross- border pollution 32 UK position 32 European Parliament position 32 3.1 Climate change 33 UK position 33 European Commission position on climate change 34 3.2 Sustainable Development 35 The Sustainable Development Goals 35 EU trade policy and sustainable development 36 3.3 Cross-border pollution 37 4. -

Innovation in Action
INN23-2O6 OVCTAOBERTION 2017 IN ACTION EUROPEAN PARLIAMENT STRASBOURG Meet the EU’s research and innovation public-private partnerships Meet the EU’s research public-private partnerships Europe needs world class research and innovation to maintain the quality of life of its citizens, and to ensure sustainable Bio-based Industries Joint Undertaking (BBI JU) is a partnership between economic growth and job creation. the EU and the Bio-based Industries Consortium and is about connecting key sectors, creating new value chains and producing innovative bio-based As European public-private partnerships (PPPs), the Joint products to develop sustainable bio-based industries in Europe. Undertakings (JUs) were set up to drive innovation in key industrial sectors, namely aviation, railway, electronic components & systems, health, fuel cells and hydrogen for transport & energy solutions, and bio-based products and Clean Sky develops innovative technologies to reduce CO , gas emissions 2 materials. and noise levels produced by aircraft by bringing together the aeronautics industry, SMEs, research centres and academia for the best innovative results. JUs are mission-oriented organisations addressing major global challenges. By mobilising actors and investors across sectors, disciplines and borders, JUs are able to create new A tripartite (EU/Industry Associations/Participating States) funding innovation ecosystems and work at the scale needed to deliver programme supporting world class Electronic Components and Systems, transformative breakthroughs. JUs do this by combining enabling Smart Solutions in key sectors such as mobility, health, environment, excellent science with a collaborative, open innovation energy, digital society and overall EU competitive manufacturing. approach that brings together partners and stakeholders from industry, SMEs, universities, research centres, civil society etc. -
Interim Evaluation of the SESAR Joint Undertaking (2014-2016) Operating Under Horizon 2020
Interim evaluation of the SESAR Joint Undertaking (2014-2016) operating under Horizon 2020 Final Report Written by: Paul Ravenhill, Tatjana Bolic Expert group: Tatjana Bolic, Paul Ravenhill, Helge Pfeiffer, Michael Dooms, Heather Allen June – 2017 EUROPEAN COMMISSION Directorate-General for Mobility and Transport Directorate E - Aviation Unit E3 - Single European Sky Contact: Octavian Vasile E-mail: [email protected] European Commission B-1049 Brussels EUROPEAN COMMISSION Interim evaluation of the SESAR Joint Undertaking (2014-2016) operating under Horizon 2020 Final Report Directorate-General for Mobility and Transport Single European Sky 2017 EUR EN PDF/Volume_01 Europe Direct is a service to help you find answers to your questions about the European Union. Freephone number (*): 00 800 6 7 8 9 10 11 (*) The information given is free, as are most calls (though some operators, phone boxes or hotels may charge you). LEGAL NOTICE This document has been prepared for the European Commission however, it reflects the views only of the authors, and the Commission cannot be held responsible for any use, which may be made of the information contained therein. More information on the European Union is available on the Internet (http://www.europa.eu). Luxembourg: Publications Office of the European Union, 2017 ISBN 978-92-79-70191-7 doi: 10.2832/69327 © European Union, 2017 Reproduction is authorised provided the source is acknowledged. Table of Contents 1. EXECUTIVE SUMMARY ............................................................................................ 8 2. INTRODUCTION ................................................................................................... 15 2.1. Purpose of the evaluation ............................................................................ 17 2.2. Scope of the evaluation ............................................................................... 17 2.3. Structure of the report ................................................................................ 17 3. -
Joint Undertakings: Innovation in Action
DIGITALISATION ENERGY TRANSPORT HEALTH GREEN TECHNOLOGIES CIRCULAR BIOBASED ECONOMY JOINT UNDERTAKINGS FOR CUTTINGEDGE RESEARCH IN EUROPE Bio-based Industries Joint Undertaking Luxembourg: Publications Office of the European Union, 2020 © European Union, 2020 Reproduction is authorised provided the source is acknowledged. PRINT ISBN 978-92-95221-01-7 doi:10.2885/693676 HS-02-20-603-EN-C PDF ISBN 978-92-95221-00-0 doi:10.2885/766310 HS-02-20-603-EN-N Bio-based Industries Joint Undertaking Luxembourg: Publications Office of the European Union, 2020 © European Union, 2020 Reproduction is authorised provided the source is acknowledged. PRINT ISBN 978-92-95221-01-7 doi:10.2885/693676 HS-02-20-603-EN-C PDF ISBN 978-92-95221-00-0 doi:10.2885/766310 HS-02-20-603-EN-N WHY DOES EUROPE NEED JOINT UNDERTAKINGS? CUTTING-EDGE RESEARCH & INNOVATION We are agile, efficient and truly inclusive public-private partnerships, capable of leveraging knowledge, skills and expertise. We keep ahead of the curve by delivering scientific excellence and innovation across key industrial sectors - smarter and greener mobility, innovative healthcare, improved circular economy, cleaner energy and better electronics. GREEN RECOVERY We are scaling up investments needed in strategic sectors in order to support the transition towards a green economy, meeting the goals of the European Green Deal and Digital Europe. ENHANCING EU COMPETITIVENESS Through a close cooperation of research and industry, and an alignment with other European and national policies, we effectively contribute to strengthening EU leadership on a global stage. MISSION-ORIENTED By embedding the partnerships within the EU’s policy and regulatory framework, we ensure that research is oriented towards the right priorities, bringing real added value to Europe’s economy and society and maximising the resources available at regional, European and global level. -
Innovation in Action
DIGITALISATION ENERGY TRANSPORT HEALTH GREEN TECHNOLOGIES CIRCULAR BIOBASED ECONOMY JOINT UNDERTAKINGS FOR CUTTINGEDGE RESEARCH IN EUROPE Bio-based Industries Joint Undertaking Luxembourg: Publications Office of the European Union, 2020 © European Union, 2020 Reproduction is authorised provided the source is acknowledged. PRINT ISBN 978-92-95221-01-7 doi:10.2885/693676 HS-02-20-603-EN-C PDF ISBN 978-92-95221-00-0 doi:10.2885/766310 HS-02-20-603-EN-N Bio-based Industries Joint Undertaking Luxembourg: Publications Office of the European Union, 2020 © European Union, 2020 Reproduction is authorised provided the source is acknowledged. PRINT ISBN 978-92-95221-01-7 doi:10.2885/693676 HS-02-20-603-EN-C PDF ISBN 978-92-95221-00-0 doi:10.2885/766310 HS-02-20-603-EN-N WHY DOES EUROPE NEED JOINT UNDERTAKINGS? CUTTING-EDGE RESEARCH & INNOVATION We are agile, efficient and truly inclusive public-private partnerships, capable of leveraging knowledge, skills and expertise. We keep ahead of the curve by delivering scientific excellence and innovation across key industrial sectors - smarter and greener mobility, innovative healthcare, improved circular economy, cleaner energy and better electronics. GREEN RECOVERY We are scaling up investments needed in strategic sectors in order to support the transition towards a green economy, meeting the goals of the European Green Deal and Digital Europe. ENHANCING EU COMPETITIVENESS Through a close cooperation of research and industry, and an alignment with other European and national policies, we effectively contribute to strengthening EU leadership on a global stage. MISSION-ORIENTED By embedding the partnerships within the EU’s policy and regulatory framework, we ensure that research is oriented towards the right priorities, bringing real added value to Europe’s economy and society and maximising the resources available at regional, European and global level.