An Educational Robotic Approach for Improvements of Learning in Technology Courses
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

002-Contents.Pdf
CubeRoot Contents Contents Contents Purple denotes upcoming contents. 1 Preface 2 Signatures of Top Cubers in the World 3 Quotes 4 Photo Albums 5 Getting Started 5.1 Cube History 5.2 WCA Events 5.3 WCA Notation 5.4 WCA Competition Tutorial 5.5 Tips to Cubers 6 Rubik's Cube 6.1 Beginner 6.1.1 LBL Method (Layer-By-Layer) 6.1.2 Finger and Toe Tricks 6.1.3 Optimizing LBL Method 6.1.4 4LLL Algorithms 6.2 Intermediate 进阶 6.2.1 Triggers 6.2.2 How to Get Faster 6.2.3 Practice Tips 6.2.4 CN (Color Neutrality) 6.2.5 Lookahead 6.2.6 CFOP Algorithms 6.2.7 Solve Critiques 3x3 - 12.20 Ao5 6.2.8 Solve Critiques 3x3 - 13.99 Ao5 6.2.9 Cross Algorithms 6.2.10 Xcross Examples 6.2.11 F2L Algorithms 6.2.12 F2L Techniques 6.2.13 Multi-Angle F2L Algorithms 6.2.14 Non-Standard F2L Algorithms 6.2.15 OLL Algorithms, Finger Tricks and Recognition 6.2.16 PLL Algorithms and Finger Tricks 6.2.17 CP Look Ahead 6.2.18 Two-Sided PLL Recognition 6.2.19 Pre-AUF CubeRoot Contents Contents 7 Speedcubing Advice 7.1 How To Get Faster 7.2 Competition Performance 7.3 Cube Maintenance 8 Speedcubing Thoughts 8.1 Speedcubing Limit 8.2 2018 Plans, Goals and Predictions 8.3 2019 Plans, Goals and Predictions 8.4 Interviewing Feliks Zemdegs on 3.47 3x3 WR Single 9 Advanced - Last Slot and Last Layer 9.1 COLL Algorithms 9.2 CxLL Recognition 9.3 Useful OLLCP Algorithms 9.4 WV Algorithms 9.5 Easy VLS Algorithms 9.6 BLE Algorithms 9.7 Easy CLS Algorithms 9.8 Easy EOLS Algorithms 9.9 VHLS Algorithms 9.10 Easy OLS Algorithms 9.11 ZBLL Algorithms 9.12 ELL Algorithms 9.13 Useful 1LLL Algorithms -

Benchmarking Beginner Algorithms for Rubik's Cube
DEGREE PROJECT, IN COMPUTER SCIENCE , FIRST LEVEL STOCKHOLM, SWEDEN 2015 Benchmarking Beginner Algorithms for Rubik's cube ANDREAS NILSSON, ANTON SPÅNG KTH ROYAL INSTITUTE OF TECHNOLOGY CSC SCHOOL Supervisor: Michael Schliephake Examiner: Örjan Ekeberg Abstract Over the years different algorithms have been developed to step-by-step solve parts of the Rubik’s cube until fi- nally reaching the unique solution. This thesis explores two commonly known beginner algorithms for solving Rubik’s cube to find how they differ in solving speed and amount of moves. The algorithms were implemented and run on a large amount of scrambled cubes to collect data. The re- sults showed that Layer-by-layer with daisy algorithm had a lower average amount of moves than the Dedmore al- gorithm. The main difference in amount of moves lies in the steps that solve the last layer of the cube. The Layer- by-layer with daisy algorithm uses only one-seventh of the time-consuming operations that Dedmore algorithm uses, which concludes that it is more suitable for speedcubing. Sammanfattning Över åren har ett antal olika algoritmer utvecklats för att steg-för-steg lösa delar av Rubik’s kub för att till sist kom- ma fram till den unika lösningen. Denna rapport utforskar två allmänt kända nybörjaralgoritmer för att lösa Rubik’s kub, för att finna hur dem skiljer sig åt i tid samt antal operationer för att nå lösningen. Algoritmerna implemen- terades och kördes på ett stort antal blandade kuber för att samla data. Resultatet visar att Lager-för-lager med daisy algoritmen hade ett lägre genomsnittligt antal förflyttning- ar jämfört med Dedmore algoritmen. -
Breaking an Old Code -And Beating It to Pieces
Breaking an Old Code -And beating it to pieces Daniel Vu - 1 - Table of Contents About the Author................................................ - 4 - Notation ............................................................... - 5 - Time for Some Cube Math........................................................................... Error! Bookmark not defined. Layer By Layer Method................................... - 10 - Step One- Cross .................................................................................................................................. - 10 - Step Two- Solving the White Corners ................................................................................................. - 11 - Step Three- Solving the Middle Layer................................................................................................. - 11 - Step Four- Orient the Yellow Edges.................................................................................................... - 12 - Step Five- Corner Orientation ............................................................................................................ - 12 - Step Six- Corner Permutation ............................................................................................................. - 13 - Step Seven- Edge Permutation............................................................................................................ - 14 - The Petrus Method........................................... - 17 - Step One- Creating the 2x2x2 Block .................................................................................................. -
Cube Lovers: Index by Date 3/18/17, 2�09 PM
Cube Lovers: Index by Date 3/18/17, 209 PM Cube Lovers: Index by Date Index by Author Index by Subject Index for Keyword Articles sorted by Date: Jul 80 Alan Bawden: [no subject] Jef Poskanzer: Complaints about :CUBE program. Alan Bawden: [no subject] [unknown name]: [no subject] Alan Bawden: [no subject] Bernard S. Greenberg: Cube minima Ed Schwalenberg: Re: Singmeister who? Bernard S. Greenberg: Singmaster Allan C. Wechsler: Re: Cubespeak Richard Pavelle: [no subject] Lauren Weinstein: confusion Alan Bawden: confusion Jon David Callas: [no subject] Bernard S. Greenberg: Re: confusion Richard Pavelle: confusion but simplicity Allan C. Wechsler: Short Introductory Speech Richard Pavelle: the cross design Bernard S. Greenberg: Re: the cross design Alan Bawden: the cross design Yekta Gursel: Re: Checker board pattern... Bernard S. Greenberg: Re: Checker board pattern... Michael Urban: Confusion Bernard S. Greenberg: Re: the cross design Bernard S. Greenberg: Re: Checker board pattern... Bernard S. Greenberg: Re: Confusion Bernard S. Greenberg: The Higher Crosses Alan Bawden: The Higher Crosses Bernard S. Greenberg: Postscript to above Bernard S. Greenberg: Bug in above Ed Schwalenberg: Re: Patterns, designs &c. Alan Bawden: Patterns, designs &c. Alan Bawden: 1260 Richard Pavelle: [no subject] Allan C. Wechsler: Re: Where to get them in the Boston Area, Cube Language. Alan Bawden: 1260 vs. 2520 Alan Bawden: OOPS Bill McKeeman: Re: Where to get them in the Boston Area, Cube Language. Bernard S. Greenberg: General remarks Bernard S. Greenberg: :cube feature http://www.math.rwth-aachen.de/~Martin.Schoenert/Cube-Lovers/ Page 1 of 45 Cube Lovers: Index by Date 3/18/17, 209 PM Alan Bawden: [no subject] Bernard S. -

A Rubik's Cube Chronology
http://cubeman.org/cchrono.txt 02/10/2007 11:35 AM A Rubik's Cube Chronology ------------------------- Researched and maintained by Mark Longridge (c) 1996-2004 Pre-Rubik --------- Feb 2, 1960 William Gustafson files patent for Manipulatable Toy Mar 12, 1963 Gustafson receives US patent 3,081,089 1970 Uwe Meffert invents a model for research of energy flow in different shape solids (pyraminx) Apr 9, 1970 Frank Fox applies for UK patent for spherical 3x3x3 Mar 4, 1970 Larry Nichols files patent for Twizzle (2x2x2 cube) Apr 11, 1972 Nichols receives US patent 3,655,201 Jan 16, 1974 Frank Fox receives UK patent 1,344,259 Post-Rubik ---------- Spring 1974 Erno Rubik gets idea to make the cube Summer 1974 Erno Rubik solves the cube (arguably the first solver) Jan 30, 1975 Rubik applies for patent on cube Oct 12, 1976 Terutoshi Ishige Japanese Patent 55-8192 for 3x3x3 1977 Rubik's Cube starts distribution in Hungary Mar 28, 1977 Erno Rubik receives Hungarian Patent HU00170062 Aug 1978 Bela Szalai first sees cube in Hungary, later manufactures cube in U.S. (Logical Games Inc) Sept 1979 Ideal Toy buys exclusive rights to the cube for one million dollars Jan 4, 1980 Victor Toth wins pioneering cube contest in 55 sec. July 1980 MIT cube lovers group starts up Sept 1980 Omni prints article on cube in Games column Jan 12, 1981 Steven Hanson and Jeffrey Breslow file US Patent for Missing Link March 1981 Scientific American's 1st article on cube March 1981 Uwe Meffert patents the pyraminx Mar 23, 1981 First mention of Rubik's Cube in Time Magazine May 1981 Reader's Digest prints cube story July 30, 1981 Walter Moll receives German patent for Dodecahedron July 31, 1981 Cube contest featuring James G. -

Rubik's Cube Solutions
Rubik’s Cube Solutions Rubik’s Cube Solution – Useful Links http://www.geocities.com/jaapsch/puzzles/theory.htm http://www.ryanheise.com/cube/ http://peter.stillhq.com/jasmine/rubikscubesolution.html http://en.wikibooks.org/wiki/How_to_solve_the_Rubik's_Cube http://www.rubiks.com/World/~/media/Files/Solution_book_LOW_RES.ashx http://helm.lu/cube/MarshallPhilipp/index.htm Rubik’s Cube in a Scrambled State Rubik’s Cube in a Solved State – CubeTwister Front: Red, Right: Yellow, Up: Blue Back: Orange, Down: Green, Left: White Cube Colors: Red opposed to Orange, Yellow opposed to White, Blue opposed to Green Rubik’s Cube Solutions 06.12.2008 http://www.mementoslangues.fr/ Rubik’s Cube Commutators and Conjugates Introduction A Commutator is an algorithm of the form X Y X' Y', and a conjugate is an algorithm of the form X Y X', where X and Y denote arbitrary algorithms on a puzzle, and X', Y' denote their respective inverses. They are formal versions of the simple, intuitive idea of "do something to set up another task which does something useful, and undo the setup." Commutators can be used to generate algorithms that only modify specific portions of a cube, and are intuitively derivable. Many puzzle solutions are heavily or fully based on commutators. Commutator and Conjugate Notation [X, Y] is a commonly used notation to represent the sequence X Y X' Y'. [X: Y] is a well-accepted representation of the conjugate X Y X'. Since commutators and conjugates are often nested together, Lucas Garron has proposed the following system for compact notation: Brackets denote an entire algorithm, and within these, the comma delimits a commutator, and a colon or a semicolon a conjugate. -
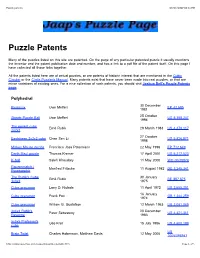
Puzzle Patents 07/08/2007 04:31 PM
Puzzle patents 07/08/2007 04:31 PM Puzzle Patents Many of the puzzles listed on this site are patented. On the page of any particular patented puzzle it usually mentions the inventor and the patent publication date and number, and has a link to a pdf file of the patent itself. On this page I have collected all those links together. All the patents listed here are of actual puzzles, or are patents of historic interest that are mentioned in the Cubic Circular or the Circle Puzzler's Manual. Many patents exist that have never been made into real puzzles, or that are minor variations of existing ones. For a nice collection of such patents, you should visit Joshua Bell's Puzzle Patents page. Polyhedral 30 December Pyraminx Uwe Meffert EP 42,695 1981 25 October Skewb Puzzle Ball Uwe Meffert US 5,358,247 1994 The pocket cube Ernö Rubik 29 March 1983 US 4,378,117 2x2x2 27 October Eastsheen 2x2x2 cube Chen Sen Li US 5,826,871 1998 Mickey Mouse puzzle Francisco Josa Patermann 22 May 1996 EP 712,649 Darth Maul puzzle Thomas Kremer 17 April 2001 US 6,217,023 K-ball Saleh Khoudary 11 May 2000 WO 00/25874 Figurenmatch / Manfred Fritsche 11 August 1982 DE 3,245,341 Pyramorphix The Rubik's Cube 30 January Ernö Rubik BE 887,875 3x3x3 1975 Cube precursor Larry D. Nichols 11 April 1972 US 3,655,201 16 January Cube precursor Frank Fox GB 1,344,259 1974 Cube precursor William G. Gustafson 12 March 1963 US 3,081,089 4x4x4 Rubik's 20 December Peter Sebesteny US 4,421,311 Revenge 1983 5x5x5 Professor's Udo Krell 15 July 1986 US 4,600,199 cube US Brain Twist Charles Hoberman, Matthew Davis 12 May 2005 2005/098947 http://www.geocities.com/jaapsch/puzzles/patents.htm Page 1 of 5 Puzzle patents 07/08/2007 04:31 PM 16 January WO Jackpot / Platypus Yusuf Seyhan 2003 03/004117 Alexander's Star Adam Alexander 26 March 1985 US 4,506,891 Dogic Zoltan and Robert Vecsei 28 July 1998 HU 214,709 Impossiball William O. -
Mini Cube, the 2X2x2 Rubik's Cube 07/04/2007 03:22 PM
Mini Cube, the 2x2x2 Rubik's Cube 07/04/2007 03:22 PM Mini Cube, the 2×2×2 Rubik's Cube http://www.geocities.com/jaapsch/puzzles/cube2.htm Page 1 of 7 Mini Cube, the 2x2x2 Rubik's Cube 07/04/2007 03:22 PM 1. Description 2. The number of positions http://www.geocities.com/jaapsch/puzzles/cube2.htm Page 2 of 7 Mini Cube, the 2x2x2 Rubik's Cube 07/04/2007 03:22 PM 3. JavaScript simulation 4. Notation 5. Solution 1 6. Solution 2 7. Nice patterns Links to other useful pages: Mefferts sells the Mickey Mouse puzzle head, Pyramorphix, 2x2x2 cubes by Eastsheen, and many other puzzles. Rubik sells the original 2x2x2 cubes, Darth Maul and Homer puzzle heads. Denny's Puzzle Pages A very nice graphical solution. Matthew Monroe's Page Although a solution for the 3x3x3 cube, it is corners first, and thus applies to the pocket cube as well. Philip Marshall's page A relatively short solution. A Nerd Paradise has solutions for the various cubes, Pyraminx, Skewb and Square-1. This puzzle is a simpler version of the Rubik's Cube. It goes under various names, such as Mini Cube and Pocket Cube. The puzzle is built from 8 smaller cubes, i.e. a 2×2×2 cube. Each face can rotate, which rearranges the 4 small cubes at that face. The six sides of the puzzle are coloured, so every small cube shows three colours. This puzzle is equivalent to just the corners of the normal Rubik's cube. -
Rubik's Cube Study
Rubik’s Cube Study Hwa Chong Institution (High School) Project Work 2020 - Category 8 (Mathematics) Written Report Group 8-21 1A1 - Alastair Chua Wei Jie (1) - Leader 1P2 - John Pan Zhenda (11) - Member 1P2 - Li Junle Tristen (16) - Member 1 Contents 1.0 Introduction 3 1.1 Rationale 3 1.2 Research Questions 3 2.0 Mechanics 3 2.0.1 Orientation of Colours 4 2.1 Notations 4 2.2 Intended Methodology 5 3.0 Literature Review 5 3.0.1 History of Rubik’s Cube 6 3.1 Background 7 4.0 Findings 8 4.1 Factors Affecting Speedcubing 8 4.2 Discovery of God’s Number 9 4.3 Formation of Algorithms 11 5.0 Conclusions 12 6.0 Possibility of Project Extension 13 7.0 References 13 2 1.0 Introduction The Rubik’s Cube has been a very well-known toy for several years, challenging for most, but a piece of cake for the intelligent few. As of January 2009, 350 million cubes had been sold worldwide, thus widely regarded as the world’s best selling toy. It is a 3D combination puzzle invented in 1974, by Ernö Rubik. 1.1 Rationale The Rubik’s Cube is not only a three-dimensional puzzle to toy with for fun, but also a source of mathematical concepts and calculations. Through this project, we intend to learn more about the mechanics of the Rubik’s Cube, and get more in-depth knowledge about how it works and the mathematics behind it. We also aim to discover more about the different types of cubes, including studying their mechanisms and algorithms. -
Resolviendo El Cubo De Rubik Con El Robot Baxter
RESOLVIENDO EL CUBO DE RUBIK CON EL ROBOT BAXTER POR CESAR´ ANDRES´ BOL´IVAR SEVERINO Departamento de Ingenier´ıa Informatica´ y Ciencias de la Computacion´ Universidad de Concepcion´ Tesis presentada a la Facultad de Ingenier´ıa de la Universidad de Concepcion´ para optar al t´ıtulo profesional de Ingeniero Civil Informatico´ Profesor Gu´ıa:Julio Godoy del Campo Comision:´ Roberto As´ınAcha,´ Eduardo Mendez´ Ortiz 3 de septiembre de 2019 Concepcion,´ Chile c Se autoriza la reproducci´ontotal o parcial, con fines acad´emicos,por cualquier medio o procedimiento, incluyendo la cita bibliogr´aficadel documento. II A mi madre, y a mi padre, que en paz descanse. III AGRADECIMIENTOS Mirando hacia atr´as,siento que toda mi vida he sido un malagradecido. Aunque me encantar´ıapoder decir que todo mis logros son productos de mi propio esfuerzo y de nadie m´as,la verdad es que muchos si es que no todos hubiesen sido imposibles de realizar sin el apoyo de mis seres queridos. Ha llegado la hora de dar las gracias, as´ıque leed bien los siguientes p´arrafosque no los escribir´edos veces. Gracias a mi familia por su amor incondicional, por creer en m´ı,por apoyar cada una de las decisiones que me llevaron a estudiar en esta prestigiosa universidad y por su apoyo financiero durante tantos a~nos,a pesar de las adversidades. Sin su esfuerzo jam´ashubiese llegado donde estoy ahora. Espero alg´und´ıapoder retribuirles todo. Gracias a mis amigos, que a pesar de la distancia que nos separa me han acompa~nadoa~notras a~no.Gracias por su lealtad y por sacarme sonrisas hasta en los momentos m´asdif´ıciles.Ya ans´ıopoder celebrar con ustedes. -

The Interpretation of Sustainability Criteria Using Game Theory Models (Sustainable Project Development with Rubik’S Cube Solution)
The Interpretation of Sustainability Criteria using Game Theory Models (Sustainable Project Development with Rubik’s Cube Solution) The Interpretation of Sustainability Criteria using Game Theory Models (Sustainable Project Development with Rubik’s Cube Solution) DR. CSABA FOGARASSY Budapest, 2014 Reviewers: Prof. István Szűcs DSc., Prof. Sándor Molnár PhD. L’Harmattan France 7 rue de l’Ecole Polytechnique 75005 Paris T.: 33.1.40.46.79.20 L’Harmattan Italia SRL Via Bava, 37 10124 Torino–Italia T./F.: 011.817.13.88 © Fogarassy Csaba, 2014 © L’Harmattan Kiadó, 2014 ISBN 978-963-236-789-7 Responsible publiser: Ádám Gyenes L’Harmattan Liberary Párbeszéd könyvesbolt 1053 Budapest, Kossuth L. u. 14–16. 1085 Budapest, Horánszky u. 20. Phone: +36-1-267-5979 www.konyveslap.hu [email protected] www.harmattan.hu Cover: RICHÁRD NAGY – CO&CO Ltd. Printing: Robinco Ltd. Executive director: Péter Kecskeméthy I dedicate this book to the memory of my cousin, IT specialist and physicist Tamás Fogarassy (1968-2013) Table of contents ABSTRACT. 11 1. INTERPRETATION OF SUSTAINABILITY WITH BASIC GAME THEORY MODELS AND RUBIK’S CUBE SYMBOLISM. 14 1.1. SUSTAINABILITY DILEMMAS, AND QUESTIONS OF TOLERANCE. 14 . 14 1.1.2. Ecologic economy versus enviro-economy �������������������������������������������������������������������������������������������17 1.1.1. Definition of strong and weak sustainability 1.1.3. Relations between total economic value and sustainable economic value . 17 1.2. THEORY OF NON-COOPERATIVE GAMES . 19 1.2.1. Search for points of equilibrium in non-cooperative games ����������������������������������������������������������20 . 23 ����26 1.2.2. Theoretical correspondences of finite games 1.2.3.1. Games with a single point of equilibrium . -
Chris Hardwick's Rubik's Cube Page 07/16/2007 01:13 AM
Chris Hardwick's Rubik's Cube Page 07/16/2007 01:13 AM This page is for people who are interested in the Rubik's Cube, and other Rubik's puzzles. I've been interested in the Cube and other puzzles since June of 1998 and I still love doing them. I enjoy speed solving for all my puzzles, especially the Rubik's Cube. If you enjoy the cube or other Rubik-like puzzles then I invite you to browse my site. I hope you enjoy it. Left to right: Ian Winokur, myself, Raul Garcia: cubing in central park Rubik's Cube World Competition 2003 25th Anniversary of the cube Click here to read about the 2003 Rubik's Games World Championships United States Rubik's Cube Championships 2004 Click here to read about the 2004 United States Rubik's Games Championships November 2005: Cubing with Dan Knights Read about it here My officially recognized national records in Speedcubing and Sport Stacking You can see all my competition results at WCA sanctioned tournaments here. See the speedcubing.com main site Videos: Sport stacking video Me performing the cycle in 10.23 seconds. http://www.speedcubing.com/chris/ Page 1 of 10 Chris Hardwick's Rubik's Cube Page 07/16/2007 01:13 AM 3x3x3 solved blindfolded in 18.50 seconds I took approximately 1 hour and 54 minutes to memorize the cube and plan through my entire solution. I was then able to solve it in 18.50 seconds while blindfolded. I did not do any moves on the cube during the planning phase.