The Prediction of Porpoising Inception for Modern Planing Craft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
GLIDING and SAIL-PLANING a Beginner's Handbook
GLIDING AND SAIL-PLANING A Beginner's Handbook by F. STAMER Principal of the Rhon-Rositten Gesellschaft Flying School and A. LIPPISCH Principal of the Rhon-Rositten Gesellschaft Technical School Translated by G. E. STARTUP and FRANCES KINNEAR With 84 illustrations. 5s. net. f ttom % JBttfltttg p GLIDING AND SAIL-PLANING GLIDING AND SAIL-PLANING A Beginner's Handbook by F. STAMER Principal of the Rhon-Rositten Gesellschaft Flying School and A. LIPPISCH Principal of the Rhon-Rositten Gesellschaft Technical'School authorized translation by G. E. STARTUP and FRANCES KINNEAR WITH 84 ILLUSTRATIONS AND DIAGRAMS LONDON JOHN LANE THE BODLEY HEAD LTD, English edition first published in 1930 PRINTED IN GREAT BRITAIN BY THE BOWERING PRESS, PLYMOUTH Foreword THE motorless AIRPLANE, i.e. the GLIDER or SAIL PLANE, is steadily growing in popularity, and is, in the truest sense of the word, the flying sport of youth. This book represents the collective results of the writers' experiments since 1921 in motorless flight, and particularly in gliding, related in a way most likely to be useful to others. In flying, more than in anything, every experience and triumph individually won by hard endeavour should be triumph and experience won for all. Its aim is to state as clearly as possible all the beginner ought to know of Gliding and Gliding Machines. Hie theories it contains are explained in such a manner as to be easily under stood. The finest airmen are often hopelessly bad mathematicians and Flying as a Sport should, as far as possible, be made easy for everybody. FRITZ STAMER and ALEXANDER LIPPISCH. -

The International Flying Dutchman Class Book
THE INTERNATIONAL FLYING DUTCHMAN CLASS BOOK www.sailfd.org 1 2 Preface and acknowledgements for the “FLYING DUTCHMAN CLASS BOOK” by Alberto Barenghi, IFDCO President The Class Book is a basic and elegant instrument to show and testify the FD history, the Class life and all the people who have contributed to the development and the promotion of the “ultimate sailing dinghy”. Its contents show the development, charm and beauty of FD sailing; with a review of events, trophies, results and the role past champions . Included are the IFDCO Foundation Rules and its byelaws which describe how the structure of the Class operate . Moreover, 2002 was the 50th Anniversary of the FD birth: 50 years of technical deve- lopment, success and fame all over the world and of Class life is a particular event. This new edition of the Class Book is a good chance to celebrate the jubilee, to represent the FD evolution and the future prospects in the third millennium. The Class Book intends to charm and induce us to know and to be involved in the Class life. Please, let me assent to remember and to express my admiration for Conrad Gulcher: if we sail, love FD and enjoyed for more than 50 years, it is because Conrad conceived such a wonderful dinghy and realized his dream, launching FD in 1952. Conrad, looked to the future with an excellent far-sightedness, conceived a “high-perfor- mance dinghy”, which still represents a model of technologic development, fashionable 3 water-line, low minimum hull weight and performance . Conrad ‘s approach to a continuing development of FD, with regard to materials, fitting and rigging evolution, was basic for the FD success. -
J/22 Sailing MANUAL
J/22 Sailing MANUAL UCI SAILING PROGRAM Written by: Joyce Ibbetson Robert Koll Mary Thornton David Camerini Illustrations by: Sally Valarine and Knowlton Shore Copyright 2013 All Rights Reserved UCI J/22 Sailing Manual 2 Table of Contents 1. Introduction to the J/22 ......................................................... 3 How to use this manual ..................................................................... Background Information .................................................................... Getting to Know Your Boat ................................................................ Preparation and Rigging ..................................................................... 2. Sailing Well .......................................................................... 17 Points of Sail ....................................................................................... Skipper Responsibility ........................................................................ Basics of Sail Trim ............................................................................... Sailing Maneuvers .............................................................................. Sail Shape ........................................................................................... Understanding the Wind.................................................................... Weather and Lee Helm ...................................................................... Heavy Weather Sailing ...................................................................... -

A CFD Study on the Performance of High Speed Planing Hulls
Grand Valley State University ScholarWorks@GVSU Masters Theses Graduate Research and Creative Practice 12-2019 A CFD Study on the Performance of High Speed Planing Hulls Mowgli J. Crosby Grand Valley State University Follow this and additional works at: https://scholarworks.gvsu.edu/theses Part of the Computational Engineering Commons, and the Dynamics and Dynamical Systems Commons ScholarWorks Citation Crosby, Mowgli J., "A CFD Study on the Performance of High Speed Planing Hulls" (2019). Masters Theses. 966. https://scholarworks.gvsu.edu/theses/966 This Thesis is brought to you for free and open access by the Graduate Research and Creative Practice at ScholarWorks@GVSU. It has been accepted for inclusion in Masters Theses by an authorized administrator of ScholarWorks@GVSU. For more information, please contact [email protected]. A CFD Study on the Performance of High Speed Planing Hulls Mowgli J. Crosby A Thesis Submitted to the Graduate Faculty of GRAND VALLEY STATE UNIVERSITY In Partial Fulfillment of the Requirements For the Degree of Master of Science in Mechanical Engineering School of Engineering December 2019 Acknowledgments I would like to take this opportunity to thank committee for their continued support throughout this project and especially thank my thesis committee chair, Dr. Mokhtar, for his continued support. It would not have been possible without his guidance. I would also like to thank Dr. Fleischmann for her assistance with the scale model testing, constant enthusiasm, and general interest in the topic. In addition, I would like to thank Dr. Reffeor for her valuable suggestion and critiques. Finally, I would like to thank Grand Valley State University for giving me the opportunity to pursue further education and for providing me with all of the resourced needed to complete my research. -

ONE DESIGN Race in One of the Strongest Windsurfing Classes Today!!
ONE DESIGN Race in one of the strongest windsurfing classes today!! The Techno 293 One Design Class is the most dynamic windsurfing class today with double figure participation growth every year !! If you want to race with a good group of people, in a fun, low cost windsurfing class, the Techno 293 OD is the board for you! In May 2007, this Class became an ISAF International Class for young riders under 17 years of age. It is now experiencing a rapid expansion worldwide with new countries and sailing federations choosing the Techno 293 OD to help develop and grow their youth windsurfing and sailing programs. In France, at the last junior and youth 2007 National Championships, more than 200 competitors found themselves on the startline. The Techno 293 OD is today the largest windsurfing fleet in the world, a breeding ground for tomorrow’s champions! To get started in racing on the Techno 293 OD, and for regular updates and Class Association information, log on to: www.techno293.org www.techno293.org ONE DESIGN TECHNO 293 One Design Progression and funboarding in 6 to 30 knots!! What helped the Techno 293 OD become such a successful Class Racing board was its general performance and easy control. The Techno 293 OD is the perfect solution to the wide range of conditions that riders encounter in competition. With a high volume and moderate outline, the Techno 293 OD provides a stable platform for learning to windsurf. A daggerboard provides directional stability and makes sailing upwind a breeze. In light winds, the near 3 metre length helps the board really glide through the water, making windsurfi ng an exciting option in sub-planing conditions. -

Racing a J80 James Ebenau
Presentation to ONE°15 Brooklyn Sail Club Speed Fundamentals Racing a J80 James Ebenau © 2016 James Ebenau. James Ebenau James began sailing when he was 14 at the Knickerbocker YC Junior sailing program in Port Washington, NY. He learned to sail in Blue Jays and moved up to Fireballs and Lasers soon after. He began racing big boats in the Thirsty Thursday evening races in Port Washington while still a junior sailor. He won the overall trophy for that series while still in high school on a Ranger built Fun 23. From there James quickly progressed to sailing as a crew member on some of the most successful big boat programs on Long Island Sound, helping to win multiple YRA of LIS seasonal championships for PHRF, IOR, and IMS. As both a skipper and crew member James won silver in many regional and National events in the J/80, J105, J109, J35, J44, Soveral 33, and Frer’s 33 one designs classes, and PHRF, IOR, IMS, and IRC class boats. In the last several years he has branched out into match racing and larger multihulls. James has won several additional championships as a skipper in both of these disciplines. © 2016 James Ebenau. Boat Adjustments and What They Do © 2016 James Ebenau. Sails - Jib Sheets • Angle of attack • Depth • Jib sheets can have marks for reference of how tight it is trimmed Leads • Twist • Can drill extra holes. Holes should match on both sides and be marked. Halyard ‐ Position of the draft • Depth © 2016 James Ebenau. Sails - Main Sheet • Angle of attack • Twist Traveler • Angle of attack Halyard/Cunningham/Outhaul • Draft position fore and aft • Depth of draft Vang • Twist Full Top Batten Tension • Depth of the top of the sail (tight is for a full sail, Loose is for a flat sail) © 2016 James Ebenau. -

Glossary of Nautical Terms: English – Italian Italian – English
Glossary of Nautical Terms: English – Italian Italian – English 2 Approved and Released by: Dal Bailey, DIR-IdC United States Coast Guard Auxiliary Interpreter Corps http://icdept.cgaux.org/ 6/29/2012 3 Index Glossary of Nautical Terms: English ‐ Italian Italian ‐ English A………………………………………………………...…..page 4 A………………………………………………………..pages 40 ‐ 42 B……………………………………………….……. pages 5 ‐ 6 B……………………………………….……………….pages 43 ‐ 44 C…………………………………………….………...pages 7 ‐ 8 C……………………………………………….……….pages 45 ‐ 47 D……………………………………………………..pages 9 ‐ 10 D………………………………………………………………..page 48 E……………………………………………….…………. page 11 E………………………………….……….…..………….......page 49 F…………………………………….………..……pages 12 ‐ 13 F.………………………………….…………………….pages 50 ‐ 51 G………………………………………………...…………page 14 G…………………………………………………….………….page 52 H………………………………………….………………..page 15 I ………………………………………………………..pages 53 ‐ 54 I………………………………………….……….……... page 16 K………………………………………………..………………page 55 J…………………………….……..……………………... page 17 L…………………………………………………………………page 56 K……………………….…………..………………………page 18 M……………………………………………………….pages 57 ‐ 58 L…………………………………………….……..pages 19 ‐ 20 N……………………………………………….……………….page 59 M…………………………………………………....….. page 21 O……………………………………………………….……….page 60 N…………………………………………………..…….. page 22 P……………………………………….……………….pages 61 ‐ 62 O………………………………………………….…….. page 23 Q…………………………………………………….………….page 63 P………………………............................. pages 24 ‐ 25 R…………………………………………………….….pages 64 ‐ 65 Q…………………………………………….……...…… page 26 S…………………………….……….………………...pages 66 ‐ 68 R…………………………………….…………... pages 27 ‐ 28 -

Basic Sailing Manual
Basic Sailing Manual California State University, Northridge Aquatic Center Department of Recreation and Tourism Management Forward Founded in 1976, the California State University, Northridge Aquatic Center has become well known throughout the community- and, in fact, the nation- for its excellence in boating and water safety education. The center, which is located at Castaic Lake Recreation Area in the scenic foothills of the Santa Clarita Valley, is one of the largest boating education centers in the nation, serving in upward of 10,000 individuals through its credit, non-credit and community service programs each year. Approximately one-quarter of those individuals are CSUN students, while three-quarters are members of the community. From students to community groups to at-risk youth, we truly offer something for everyone. Upon completion of our sailing program, all individuals can receive a Department of Boating and Waterways, State of California, Boating Safety Course Certification and California Community Sailing Certification. The Center, has been recognized by the California International Sailing Association, as well as received the Excellence Award from the National Safe Boating Council Youth Program. 2 Where We Are Located 3 4 5 Sailing and the Wind Note: Boats on a Starboard tack usually have the right of way since they are on starboard tack; the wind is blowing over their starboard (right) side. 6 Close Hauled (Toward the Wind) The highest degree on which most boats can sail efficiently is an angle approximately 40-45 degrees off the wind. The wind will be coming across the bow of the boat and the tell-tails will point almost straight back. -
Most Performance Plateaus Occur
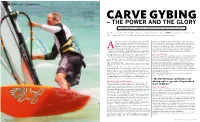
MASTERCLASS TECHNIQUE // Consistent, fast carve gybes through the chop only happen when you get rig power to pull you into the turn, control the nose and help set the edge. PHOTO Brett Kenny Words PETER HART // Photos HART PHOTOGRAPHY & BRETT KENNY OF RADICAL SPORTS AS YOU SEEK TO MASTER THE CORNERSTONE OF WINDSURFING TECHNIQUE, HARTY FOCUSES ON THE ISSUE THAT MOST COMMONLY TRIPS UP THE IMPROVER !AND THAT’S ALL OF US" # POWER CONTROL. dog is sat on the top of a hill staring forlornly into the middle Dynamic wave-riding is a power on power off game - powering on to drive distance. Underneath the thought bubble reads: “but what if the rail, powering off to release the nose and redirect always at exactly the I never find out who’s a good boy?” It was an inspired cartoon right angle to the wind on the right part of the wave. Power up too soon and described to me by Ken Way, former windsurfer and current you bury the nose and stall; power up too late and you pivot and stop. performance therapist to Premier League champions Leicester And back down a level with the intermediate - learning to commit to the City.A (Please see the back page for the full conversation.) harness and release the death handgrip only comes from knowing how to His role is to get players into a mental state where they can perform freely dump power in an instant to avoid the dreaded hooked-in catapult. and instinctively – no easy task with the frenetic vocal expectations of 30,000 fans ringing in their ears. -

Seakeeping Analysis of Planing Craft Under Large Wave Height
water Article Seakeeping Analysis of Planing Craft under Large Wave Height Xiaosheng Bi, Jiayuan Zhuang * and Yumin Su Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University, Harbin 150001, China; [email protected] (X.B.); [email protected] (Y.S.) * Correspondence: [email protected] Received: 14 February 2020; Accepted: 31 March 2020; Published: 2 April 2020 Abstract: The purpose of this paper is to conduct a seakeeping analysis of planing craft under regular wave with large wave height. To obtain a reliable numerical method to simulate the sailing of planing craft in waves, Reynolds-averaged Navier–Stokes (RANS) solver and overset method are adopted. The motion response and resistance of the planing craft USV01 in regular wave were numerical predicted and compared with the corresponding seakeeping experimental tests. The results show that the numerical method has high accuracy. For further study, a new planing craft whose name is improved vessel is selected for simulation, the low steaming of the USV01 and improved vessel in regular wave with large wave height was simulated, and the seakeeping of the two vessels was studied. The analysis about the influence of wave length on the motion response and navigation configurations of the improved vessel under regular wave was carried out. Meanwhile, the influence of speed on different navigation configurations of the improved vessel was also analyzed. The improved vessel can provide better seakeeping, and a reduction in the speed of the vessel will benefit its seakeeping, irrespective of its navigation configuration. Keywords: planing craft; numerical method; seakeeping analysis; large wave height 1. -
Power Performance of Planing Boats with the Effect of Propeller Selection and Propeller Guard Design
AN ABSTRACT OF THE THESIS OF DANIEL M. LADDfor the degree of MASTER OF SCIENCE inMechanical Engineeringpresented on refiri7r Title: POWER PERFORMANCE OF PLANING BOATS WITH THE EFFECT OF PROPELLER SELECTION AND PROPELLER GUARD DESIGN Abstract approved: Redacted forPrivacyr J. XillyKinney One of the unique problems associated with salmon gillnet fish- ing is of preventing the fouling of the boat's propeller in the net and associated fishing gear.Presently, the solution to this problem has been the addition of a basket type propeller guard which may produce a drag increase of 50 percent on small planing boats. Recognizing the need for a greater understanding of the inter- relationship of boat drag and engine power to the effect of propeller selection and propeller guard design, this study analytically models planing boat power performance including the experimentally deter- mined effects of nozzle type propeller guard design.The model predicts the drag forces acting on a prismatic planing hull and existing data on marine propeller performance is incorporated in the model such that the propeller shaft speed and shaft power for a particular boat propeller combination can be predicted.The model will also optimize propeller diameter. Three variations of nozzle type propeller guards were tested on a 16 ft. planing boat.The guards were a commercially produced outboard motor propeller weed guard, a short (1/D = 0.275) flow accelerating nozzle and the nozzle equipped with prerotation vanes. Computer modeling the effect of the three nozzle guards -

Speed Tuning the Tasar
Tuning Pre Race There is little on Tasars to adjust and be concerned with, but check the following: Shroud tension for: strong winds: as tight as you can readily get them; medium winds: firmly tight when pull backs are aft; light winds: as for medium, but only 2/3 pulled aft. Diamond stays: as per the book: finger tight to jib pole fitting on mast, BUT for lightweights who need bend in the rig, try slightly looser. For heavyweights who need less bend,-slightly tighter. PERHAPS looser in waves and very gusty winds, but I’m not convinced this really helps. Batten tension: remove all vertical folds along batten pockets; have small creases between mast and battens: removable with main sheet tension. Tension top batten the most, and less so with the lower ones (V lock fittings help). In waves and light or medium air: fuller sail for power; in flat water and strong winds: flatter sail. Clew board/jib sheets: in strong winds, fasten one or more holes below the middle: in medium to light winds, fasten in the middle. Jib luff tension: this depends on your particular style: pointing: wrinkles just not present; flat water: flatter jib; waves: fuller for power/acceleration. Blocks and slides should run smoothly: silicone spray can be useful. Sailing Tasars Fast Some people sail fast using slight variations to the settings and techniques described. The advice below simplifies reality. When sailing conditions change continuously, alterations should also be made continuously by the crew and helmsman. These changes should be introduced with the minimum of thought so that more important strategic and tactical considerations can be focused on.