Automatic Irrigation : Sensors and System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Concept of Field in the History of Electromagnetism
The concept of field in the history of electromagnetism Giovanni Miano Department of Electrical Engineering University of Naples Federico II ET2011-XXVII Riunione Annuale dei Ricercatori di Elettrotecnica Bologna 16-17 giugno 2011 Celebration of the 150th Birthday of Maxwell’s Equations 150 years ago (on March 1861) a young Maxwell (30 years old) published the first part of the paper On physical lines of force in which he wrote down the equations that, by bringing together the physics of electricity and magnetism, laid the foundations for electromagnetism and modern physics. Statue of Maxwell with its dog Toby. Plaque on E-side of the statue. Edinburgh, George Street. Talk Outline ! A brief survey of the birth of the electromagnetism: a long and intriguing story ! A rapid comparison of Weber’s electrodynamics and Maxwell’s theory: “direct action at distance” and “field theory” General References E. T. Wittaker, Theories of Aether and Electricity, Longam, Green and Co., London, 1910. O. Darrigol, Electrodynamics from Ampère to Einste in, Oxford University Press, 2000. O. M. Bucci, The Genesis of Maxwell’s Equations, in “History of Wireless”, T. K. Sarkar et al. Eds., Wiley-Interscience, 2006. Magnetism and Electricity In 1600 Gilbert published the “De Magnete, Magneticisque Corporibus, et de Magno Magnete Tellure” (On the Magnet and Magnetic Bodies, and on That Great Magnet the Earth). ! The Earth is magnetic ()*+(,-.*, Magnesia ad Sipylum) and this is why a compass points north. ! In a quite large class of bodies (glass, sulphur, …) the friction induces the same effect observed in the amber (!"#$%&'(, Elektron). Gilbert gave to it the name “electricus”. -

08. Ampère and Faraday Darrigol (2000), Chap 1
08. Ampère and Faraday Darrigol (2000), Chap 1. A. Pre-1820. (1) Electrostatics (frictional electricity) • 1780s. Coulomb's description: ! Two electric fluids: positive and negative. ! Inverse square law: It follows therefore from these three tests, that the repulsive force that the two balls -- [which were] electrified with the same kind of electricity -- exert on each other, Charles-Augustin de Coulomb follows the inverse proportion of (1736-1806) the square of the distance."" (2) Magnetism: Coulomb's description: • Two fluids ("astral" and "boreal") obeying inverse square law. • No magnetic monopoles: fluids are imprisoned in molecules of magnetic bodies. (3) Galvanism • 1770s. Galvani's frog legs. "Animal electricity": phenomenon belongs to biology. • 1800. Volta's ("volatic") pile. Luigi Galvani (1737-1798) • Pile consists of alternating copper and • Charged rod connected zinc plates separated by to inner foil. brine-soaked cloth. • Outer foil grounded. • A "battery" of Leyden • Inner and outer jars that can surfaces store equal spontaeously recharge but opposite charges. themselves. 1745 Leyden jar. • Volta: Pile is an electric phenomenon and belongs to physics. • But: Nicholson and Carlisle use voltaic current to decompose Alessandro Volta water into hydrogen and oxygen. Pile belongs to chemistry! (1745-1827) • Are electricity and magnetism different phenomena? ! Electricity involves violent actions and effects: sparks, thunder, etc. ! Magnetism is more quiet... Hans Christian • 1820. Oersted's Experimenta circa effectum conflictus elecrici in Oersted (1777-1851) acum magneticam ("Experiments on the effect of an electric conflict on the magnetic needle"). ! Galvanic current = an "electric conflict" between decompositions and recompositions of positive and negative electricities. ! Experiments with a galvanic source, connecting wire, and rotating magnetic needle: Needle moves in presence of pile! "Otherwise one could not understand how Oersted's Claims the same portion of the wire drives the • Electric conflict acts on magnetic poles. -

Guide for the Use of the International System of Units (SI)
Guide for the Use of the International System of Units (SI) m kg s cd SI mol K A NIST Special Publication 811 2008 Edition Ambler Thompson and Barry N. Taylor NIST Special Publication 811 2008 Edition Guide for the Use of the International System of Units (SI) Ambler Thompson Technology Services and Barry N. Taylor Physics Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 (Supersedes NIST Special Publication 811, 1995 Edition, April 1995) March 2008 U.S. Department of Commerce Carlos M. Gutierrez, Secretary National Institute of Standards and Technology James M. Turner, Acting Director National Institute of Standards and Technology Special Publication 811, 2008 Edition (Supersedes NIST Special Publication 811, April 1995 Edition) Natl. Inst. Stand. Technol. Spec. Publ. 811, 2008 Ed., 85 pages (March 2008; 2nd printing November 2008) CODEN: NSPUE3 Note on 2nd printing: This 2nd printing dated November 2008 of NIST SP811 corrects a number of minor typographical errors present in the 1st printing dated March 2008. Guide for the Use of the International System of Units (SI) Preface The International System of Units, universally abbreviated SI (from the French Le Système International d’Unités), is the modern metric system of measurement. Long the dominant measurement system used in science, the SI is becoming the dominant measurement system used in international commerce. The Omnibus Trade and Competitiveness Act of August 1988 [Public Law (PL) 100-418] changed the name of the National Bureau of Standards (NBS) to the National Institute of Standards and Technology (NIST) and gave to NIST the added task of helping U.S. -
Appendix H: Common Units and Conversions Appendices 215
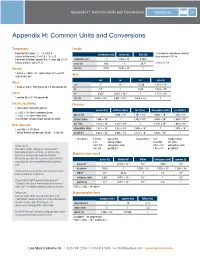
Appendix H: Common Units and Conversions Appendices 215 Appendix H: Common Units and Conversions Temperature Length Fahrenheit to Celsius: °C = (°F-32)/1.8 1 micrometer (sometimes referred centimeter (cm) meter (m) inch (in) Celsius to Fahrenheit: °F = (1.8 × °C) + 32 to as micron) = 10-6 m Fahrenheit to Kelvin: convert °F to °C, then add 273.15 centimeter (cm) 1 1.000 × 10–2 0.3937 -3 Celsius to Kelvin: add 273.15 meter (m) 100 1 39.37 1 mil = 10 in Volume inch (in) 2.540 2.540 × 10–2 1 –3 3 1 liter (l) = 1.000 × 10 cubic meters (m ) = 61.02 Area cubic inches (in3) cm2 m2 in2 circ mil Mass cm2 1 10–4 0.1550 1.974 × 105 1 kilogram (kg) = 1000 grams (g) = 2.205 pounds (lb) m2 104 1 1550 1.974 × 109 Force in2 6.452 6.452 × 10–4 1 1.273 × 106 1 newton (N) = 0.2248 pounds (lb) circ mil 5.067 × 10–6 5.067 × 10–10 7.854 × 10–7 1 Electric resistivity Pressure 1 micro-ohm-centimeter (µΩ·cm) pascal (Pa) millibar (mbar) torr (Torr) atmosphere (atm) psi (lbf/in2) = 1.000 × 10–6 ohm-centimeter (Ω·cm) –2 –3 –6 –4 = 1.000 × 10–8 ohm-meter (Ω·m) pascal (Pa) 1 1.000 × 10 7.501 × 10 9.868 × 10 1.450 × 10 = 6.015 ohm-circular mil per foot (Ω·circ mil/ft) millibar (mbar) 1.000 × 102 1 7.502 × 10–1 9.868 × 10–4 1.450 × 10–2 2 0 –3 –2 Heat flow rate torr (Torr) 1.333 × 10 1.333 × 10 1 1.316 × 10 1.934 × 10 5 3 2 1 1 watt (W) = 3.413 Btu/h atmosphere (atm) 1.013 × 10 1.013 × 10 7.600 × 10 1 1.470 × 10 1 British thermal unit per hour (Btu/h) = 0.2930 W psi (lbf/in2) 6.897 × 103 6.895 × 101 5.172 × 101 6.850 × 10–2 1 1 torr (Torr) = 133.332 pascal (Pa) 1 pascal (Pa) = 0.01 millibar (mbar) 1.33 millibar (mbar) 0.007501 torr (Torr) –6 A Note on SI 0.001316 atmosphere (atm) 9.87 × 10 atmosphere (atm) 2 –4 2 The values in this catalog are expressed in 0.01934 psi (lbf/in ) 1.45 × 10 psi (lbf/in ) International System of Units, or SI (from the Magnetic induction B French Le Système International d’Unités). -

Electricity and Magnetism
Lecture 10 Fundamentals of Physics Phys 120, Fall 2015 Electricity and Magnetism A. J. Wagner North Dakota State University, Fargo, ND 58102 Fargo, September 24, 2015 Overview • Unexplained phenomena • Charges and electric forces revealed • Currents and circuits • Electricity and Magnetism are related! 1 Newton’s dream I wish we could derive the rest of the phenomena of Nature by the same kind of reasoning from mechanical principles, for I am induced by many reasons to suspect that they may all depend upon certain forces by which the particles of bodies, by some cause hitherto unknown, are either mutually impelled towards one another, and cohere in regular figures, or are repelled and recede from one another. from the preface of Newton’s Principia 2 What were those mysterious phenomena? 900 BC: Magnus, a Greek shepherd, walks across a field of black stones which pull the iron nails out of his sandals and the iron tip from his shepherd’s staff (authenticity not guaranteed). This region becomes known as Magnesia. 600 BC: Thales of Miletos(Greece) discovered that by rubbing an ’elektron’ (a hard, fossilized resin that today is known as amber) against a fur cloth, it would attract particles of straw and feathers. This strange effect remained a mystery for over 2000 years. 1269 AD: Petrus Peregrinus of Picardy, Italy, discovers that natural spherical magnets (lodestones) align needles with lines of longitude pointing between two pole positions on the stone. 3 ca. 1600: Dr.William Gilbert (court physician to Queen Elizabeth) discovers that the earth is a giant magnet just like one of the stones of Peregrinus, explaining how compasses work. -

Physics, Chapter 30: Magnetic Fields of Currents
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 30: Magnetic Fields of Currents Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 30: Magnetic Fields of Currents" (1958). Robert Katz Publications. 151. https://digitalcommons.unl.edu/physicskatz/151 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 30 Magnetic Fields of Currents 30-1 Magnetic Field around an Electric Current The first evidence for the existence of a magnetic field around an electric current was observed in 1820 by Hans Christian Oersted (1777-1851). He found that a wire carrying current caused a freely pivoted compass needle B D N rDirection I of current D II. • ~ I I In wire ' \ N I I c , I s c (a) (b) Fig. 30-1 Oersted's experiment. Compass needle is deflected toward the west when the wire CD carrying current is placed above it and the direction of the current is toward the north, from C to D. in its vicinity to be deflected. If the current in a long straight wire is directed from C to D, as shown in Figure 30-1, a compass needle below it, whose initial orientation is shown in dotted lines, will have its north pole deflected to the left and its south pole deflected to the right. -

CAR-ANS Part 5 Governing Units of Measurement to Be Used in Air and Ground Operations
CIVIL AVIATION REGULATIONS AIR NAVIGATION SERVICES Part 5 Governing UNITS OF MEASUREMENT TO BE USED IN AIR AND GROUND OPERATIONS CIVIL AVIATION AUTHORITY OF THE PHILIPPINES Old MIA Road, Pasay City1301 Metro Manila UNCOTROLLED COPY INTENTIONALLY LEFT BLANK UNCOTROLLED COPY CAR-ANS PART 5 Republic of the Philippines CIVIL AVIATION REGULATIONS AIR NAVIGATION SERVICES (CAR-ANS) Part 5 UNITS OF MEASUREMENTS TO BE USED IN AIR AND GROUND OPERATIONS 22 APRIL 2016 EFFECTIVITY Part 5 of the Civil Aviation Regulations-Air Navigation Services are issued under the authority of Republic Act 9497 and shall take effect upon approval of the Board of Directors of the CAAP. APPROVED BY: LT GEN WILLIAM K HOTCHKISS III AFP (RET) DATE Director General Civil Aviation Authority of the Philippines Issue 2 15-i 16 May 2016 UNCOTROLLED COPY CAR-ANS PART 5 FOREWORD This Civil Aviation Regulations-Air Navigation Services (CAR-ANS) Part 5 was formulated and issued by the Civil Aviation Authority of the Philippines (CAAP), prescribing the standards and recommended practices for units of measurements to be used in air and ground operations within the territory of the Republic of the Philippines. This Civil Aviation Regulations-Air Navigation Services (CAR-ANS) Part 5 was developed based on the Standards and Recommended Practices prescribed by the International Civil Aviation Organization (ICAO) as contained in Annex 5 which was first adopted by the council on 16 April 1948 pursuant to the provisions of Article 37 of the Convention of International Civil Aviation (Chicago 1944), and consequently became applicable on 1 January 1949. The provisions contained herein are issued by authority of the Director General of the Civil Aviation Authority of the Philippines and will be complied with by all concerned. -

Magnetic Immunity of the MRAM Devices
APPLICATION NOTE AN-MEM-003 Magnetic Immunity of the MRAM Devices Table 1: Cross Reference of Applicable Products Product Name Manufacturer Part Number SMD # Device Type Internal PIC# 16Mb MRAM Device UT8MR2M8 5962-12227 01 WP01 64Mb MRAM Device UT8MR8M8 5962-13207 01 MQ09 *PIC = Product Identification Code 1.0 Overview CAES Colorado Springs offers a 16Mb and 64Mb Non-Volatile Magnetoresistive Random Access Memory (MRAM) device. The MRAM devices are designed specifically for operation in both HiRel and Space environments. This application note addresses concerns with the magnetic immunity of these devices. CAES has determined that the MRAM devices have no magnetic risk in the space environment and recommends proper handling to address terrestrial environments. 2.0 Magnetic Fields All magnetic fields are caused by electrical charge in motion. Even the fields from a stationary permanent magnet RELEASED RELEASED are the result of the rotation (quantum spin) of electrons within the material. There are two "components" of a magnetic field which are both commonly called "magnetic field." They are the B field (historically called Magnetic Induction) and the H field (historically called Magnetic Field). They are related by the equation B = H + 4pM where M is a term called "Magnetization" or "Magnetic Polarization" and is a property of the materials through which the 11 fields pass. Technically, M is the magnetic moment of the material per unit volume. To obtain the total B field, if considering the field in a volume of space, the free (unbound field) H plus the bound fields (magnetic dipoles) M / 13 must be known. -

Magnetic Units
Magnetic Units Magnetic poles, moments and magnetic dipoles The famous inverse square force law between two poles p1 and p2 separated by a distance r was discovered by the English scientist John Michell (1750), and the French scientist Charles Coulomb (1785): In the cgs (electromagnetic) system, k = 1, and the interaction force between two poles each of unit strength (in emu) separated by 1 cm is equal to 1 dyne. Alternatively, one can visualize this force as an interaction force between the pole p0 and the field H produced by another other pole of strength p: Therefore, the field produced by p at the location of p0 a distance r away is given by: The unit of the magnetic field, the Oersted (Oe), is defined as the strength of the field produced by a unit pole at a point 1 cm away (by eq. 3). Alternatively, it is the strength of the field which exerts a force of 1 dyne of a unit pole (by eq. 2). Faraday’s representation Michael Faraday represented the field strength in terms of “lines of force” (1 line of force = 1 maxwell (= 1 Mx)). In this representation, the field strength is defined as the number of lines of force passing through a unit area normal to the field. Therefore: 1 Oe = 1 line of force/cm2 = 1 Mx/cm2 (4) A bar magnet has a magnetic moment given in terms of the pole strength and length of the magnet by: The unit of the magnetic moment in cgs system is emu = erg/Oe. It is worth mentioning that the magnetic pole does not exist, neither can the distance between the two poles be determined accurately due to non-localization of the pole. -

The International System of Units (SI) - Conversion Factors For
NIST Special Publication 1038 The International System of Units (SI) – Conversion Factors for General Use Kenneth Butcher Linda Crown Elizabeth J. Gentry Weights and Measures Division Technology Services NIST Special Publication 1038 The International System of Units (SI) - Conversion Factors for General Use Editors: Kenneth S. Butcher Linda D. Crown Elizabeth J. Gentry Weights and Measures Division Carol Hockert, Chief Weights and Measures Division Technology Services National Institute of Standards and Technology May 2006 U.S. Department of Commerce Carlo M. Gutierrez, Secretary Technology Administration Robert Cresanti, Under Secretary of Commerce for Technology National Institute of Standards and Technology William Jeffrey, Director Certain commercial entities, equipment, or materials may be identified in this document in order to describe an experimental procedure or concept adequately. Such identification is not intended to imply recommendation or endorsement by the National Institute of Standards and Technology, nor is it intended to imply that the entities, materials, or equipment are necessarily the best available for the purpose. National Institute of Standards and Technology Special Publications 1038 Natl. Inst. Stand. Technol. Spec. Pub. 1038, 24 pages (May 2006) Available through NIST Weights and Measures Division STOP 2600 Gaithersburg, MD 20899-2600 Phone: (301) 975-4004 — Fax: (301) 926-0647 Internet: www.nist.gov/owm or www.nist.gov/metric TABLE OF CONTENTS FOREWORD.................................................................................................................................................................v -

History of Magnetism and Electricity History of Magnetism and Electricity
History of Magnetism and Electricity History of Magnetism and Electricity ● As the result of successfully completing this unit, the students will – Discuss the historical background of electricity, electromagnetism, and circuits – Compare and Contrast the time frame needed to discover the basic laws of electromagnetism and the time frame this course is taking to introduce those same concepts to the students Static Electricity – Thales from Milet ● Ca 600 BC ● Amber rubbed will attract light objects sources: http://en.wikipedia.org/wiki/File:Thales.jpg Static Electricity Static Electricity Static Electricity Static Electricity Static Electricity Static Electricity Static Electricity Static Electricity – Thales from Milet ● Ca 600 BC ● Amber rubbed will attract light objects sources: http://en.wikipedia.org/wiki/File:Thales.jpg Static Electricity – Thales from Milet ● Ca 600 BC ● Amber rubbed will attract light objects ● ηλεκτρον (greek for amber) sources: http://en.wikipedia.org/wiki/File:Thales.jpg Static Electricity η λ ε κ τ ρ ο ν η = Eta λ = Lambda ε = Epsilon κ = Kappa τ = Tau ρ = Rho ο = Omega ν = Nu Static Electricity η λ ε κ τ ρ ο ν η = E E L E K T R O N λ = L ε = E κ = K τ = T ρ = R ο = O ν = N Static Electricity – Thales from Milet ● Ca 600 BC ● Amber rubbed will attract light objects ● ηλεκτρον (greek for amber) → electron sources: http://en.wikipedia.org/wiki/File:Thales.jpg William Gilbert - Magnetism ● 1600 sources: http://en.wikipedia.org/wiki/File:William_Gilbert.jpg http://www.solarnavigator.net/compass.htm http://www.physics.ubc.ca/~outreach/phys420/p420_01/shaun/shaun/why_it_works.htm -

Contributions of Maxwell to Electromagnetism
GENERAL I ARTICLE Contributions of Maxwell to Electromagnetism P V Panat Maxwell, one of the greatest physicists of the nineteenth century, was the founder ofa consistent theory ofelectromag netism. However, it must be noted that significant discov eries and intelligent efforts of Coulomb, Volta, Ampere, Oersted, Faraday, Gauss, Poisson, Helmholtz and others preceded the work of Maxwell, enhancing a partial under P V Panat is Professor of standing of the connection between electricity and magne Physics at the Pune tism. Maxwell, by sheer logic and physical understanding University, His main of the earlier discoveries completed the unification of elec research interests are tricity and magnetism. The aim of this article is to describe condensed matter theory and quantum optics. Maxwell's contribution to electricity and magnetism. Introduction Historically, the phenomenon of magnetism was known at least around the 11th century. Electrical charges were discovered in the mid 17th century. Since then, for a long time, these phenom ena were studied separately since no connection between them could be seen except by analogies. It was Oersted's discovery, in July 1820, that a voltaic current-carrying wire produces a mag netic field, which connected electricity and magnetism. An other significant step towards establishing this connection was taken by Faraday in 1831 by discovering the law of induction. Besides, Faraday was perhaps the first proponent of, what we call in modern language, field. His ideas of the 'lines of force' and the 'tube of force' are akin to the modern idea of a field and flux, respectively. Maxwell was backed by the efforts of these and other pioneers.