Waveguide Propagation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Lecture 17 - Rectangular Waveguides/Photonic Crystals� and Radiative Recombination -Outline�
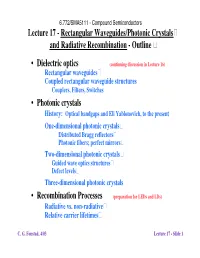
6.772/SMA5111 - Compound Semiconductors Lecture 17 - Rectangular Waveguides/Photonic Crystals� and Radiative Recombination -Outline� • Dielectric optics (continuing discussion in Lecture 16) Rectangular waveguides� Coupled rectangular waveguide structures Couplers, Filters, Switches • Photonic crystals History: Optical bandgaps and Eli Yablonovich, to the present One-dimensional photonic crystals� Distributed Bragg reflectors� Photonic fibers; perfect mirrors� Two-dimensional photonic crystals� Guided wave optics structures� Defect levels� Three-dimensional photonic crystals • Recombination Processes (preparation for LEDs and LDs) Radiative vs. non-radiative� Relative carrier lifetimes� C. G. Fonstad, 4/03 Lecture 17 - Slide 1 Absorption in semiconductors - indirect-gap band-to-band� •� The phonon modes involved indirect band gap absorption •� Dispersion curves for acoustic and optical phonons Approximate optical phonon energies for several semiconductors Ge: 37 meV (Swaminathan and Macrander) Si: 63 meV GaAs: 36 meV C. G. Fonstad, 4/03� Lecture 15 - Slide 2� Slab dielectric waveguides� •�Nature of TE-modes (E-field has only a y-component). For the j-th mode of the slab, the electric field is given by: - (b -w ) = j j z t E y, j X j (x)Re[ e ] In this equation: w: frequency/energy of the light pw = n = l 2 c o l o: free space wavelength� b j: propagation constant of the j-th mode Xj(x): mode profile normal to the slab. satisfies d 2 X j + 2 2- b 2 = 2 (ni ko j )X j 0 dx where:� ni: refractive index in region i� ko: propagation constant in free space = pl ko 2 o C. G. Fonstad, 4/03� Lecture 17 - Slide 3� Slab dielectric waveguides� •�In approaching a slab waveguide problem, we typically take the dimensions and indices in the various regions and the free space wavelength or frequency of the light as the "givens" and the unknown is b, the propagation constant in the slab. -

About the Phasor Pathways in Analogical Amplitude Modulations
About the Phasor Pathways in Analogical Amplitude Modulations H.M. de Oliveira1, F.D. Nunes1 ABSTRACT Phasor diagrams have long been used in Physics and Engineering. In telecommunications, this is particularly useful to clarify how the modulations work. This paper addresses rotating phasor pathways derived from different standard Amplitude Modulation Systems (e.g. A3E, H3E, J3E, C3F). A cornucopia of algebraic curves is then derived assuming a single tone or a double tone modulation signal. The ratio of the frequency of the tone modulator (fm) and carrier frequency (fc) is considered in two distinct cases, namely: fm/fc<1 and fm/fc 1. The geometric figures are some sort of Lissajours figures. Different shapes appear looking like epicycloids (including cardioids), rhodonea curves, Lemniscates, folium of Descartes or Lamé curves. The role played by the modulation index is elucidated in each case. Keyterms: Phasor diagram, AM, VSB, Circular harmonics, algebraic curves, geometric figures. 1. Introduction Classical analogical modulations are a nearly exhausted subject, a century after its introduction. The first approach to the subject typically relies on the case of transmission of a single tone (for the sake of simplicity) and establishes the corresponding phasor diagram. This furnishes a straightforward interpretation, which is quite valuable, especially with regard to illustrating the effects of the modulation index, overmodulation effects, and afterward, distinctions between AM and NBFM. Often this presentation is rather naïf. Nice applets do exist to help the understanding of the phasor diagram [1- 4]. However ... Without further target, unpretentiously, we start a deeper investigating the dynamic phasor diagram with the aim of building applets or animations that illustrates the temporal variation of the magnitude of the amplitude modulated phasor. -

Correspondence Between Phasor Transforms and Frequency Response Function in Rlc Circuits
CORRESPONDENCE BETWEEN PHASOR TRANSFORMS AND FREQUENCY RESPONSE FUNCTION IN RLC CIRCUITS Hassan Mohamed Abdelalim Abdalla Polytechnic Department of Engineering and Architecture, University of Studies of Udine, 33100 Udine, Italy. E-mail: [email protected] Abstract: The analysis of RLC circuits is usually made by considering phasor transforms of sinusoidal signals (characterized by constant amplitude, period and phase) that allow the calculation of the AC steady state of RLC circuits by solving simple algebraic equations. In this paper I try to show that phasor representation of RLC circuits is analogue to consider the frequency response function (commonly designated by FRF) of the total impedance of the circuit. In this way I derive accurate expressions for the resonance and anti-resonance frequencies and their corresponding values of impedances of the parallel and series RLC circuits respectively, notwithstanding the presence of damping effects. Keywords: Laplace transforms, phasors, Frequency response function, RLC circuits. 1. Introduction and mathematical background RLC circuits have many applications as oscillator circuits described by a second-order differential equation. The three circuit elements, resistor R, inductor L and capacitor C can be combined in different manners. All three elements in series or in parallel are the simplest and most straightforward to analyze. RLC circuits are analyzed mathematically in the phasor domain instead of solving differential equations in the time domain. Generally, a time-dependent sinusoidal function is expressed in the following way è [1]: () (1.1) where is the amplitude, is the angular frequency and is the initial phase of . () = sin ( + ) The medium value of is given by: () () (1.2) 1 2 = |()| = where is the period of the sinusoidal function . -

RF Coils, Helical Resonators and Voltage Magnification by Coherent Spatial Modes
TELSIKS 2001, University of Nis, Yugoslavia (September 19-21, 2001) and MICROWAVE REVIEW 1 RF Coils, Helical Resonators and Voltage Magnification by Coherent Spatial Modes K.L. Corum* and J.F. Corum** “Is there, I ask, can there be, a more interesting study than that of alternating currents.” Nikola Tesla, (Life Fellow, and 1892 Vice President of the AIEE)1 Abstract – By modeling a wire-wound coil as an anisotropically II. CYLINDRICAL HELICES conducting cylindrical boundary, one may start from Maxwell’s equations and deduce the structure’s resonant behavior. Not A. Problem Formulation only can the propagation factor and characteristic impedance be determined for such a helically disposed surface waveguide, but also its resonances, “self-capacitance” (so-called), and its voltage A uniform helix is described by its radius (r = a), its pitch magnification by standing waves. Further, the Tesla coil passes (or turn-to-turn wire spacing "s"), and its pitch angle ψ, to a conventional lumped element inductor as the helix is which is the angle that the tangent to the helix makes with a electrically shortened. plane perpendicular to the axis of the structure (z). Geometrically, ψ = cot-1(2πa/s). The wave equation is not Keywords – coil, helix, surface wave, resonator, inductor, Tesla. separable in helical coordinates and there exists no rigorous 3 solution of Maxwell's equations for the solenoidal helix. I. INTRODUCTION However, at radio frequencies a wire-wound helix with many turns per free-space wavelength (e.g., a Tesla coil) One of the more significant challenges in electrical may be modeled as an idealized anisotropically conducting cylindrical surface that conducts only in the helical science is that of constricting a great deal of insulated conductor into a compact spatial volume and determining direction. -

Lecture 26 Dielectric Slab Waveguides
Lecture 26 Dielectric Slab Waveguides In this lecture you will learn: • Dielectric slab waveguides •TE and TM guided modes in dielectric slab waveguides ECE 303 – Fall 2005 – Farhan Rana – Cornell University TE Guided Modes in Parallel-Plate Metal Waveguides r E()rr = yˆ E sin()k x e− j kz z x>0 o x x Ei Ei r r Ey k E r k i r kr i H Hi i z ε µo Hr r r ki = −kx xˆ + kzzˆ kr = kx xˆ + kzzˆ Guided TE modes are TE-waves bouncing back and fourth between two metal plates and propagating in the z-direction ! The x-component of the wavevector can have only discrete values – its quantized m π k = where : m = 1, 2, 3, x d KK ECE 303 – Fall 2005 – Farhan Rana – Cornell University 1 Dielectric Waveguides - I Consider TE-wave undergoing total internal reflection: E i x ε1 µo r k E r i r kr H θ θ i i i z r H r ki = −kx xˆ + kzzˆ r kr = kx xˆ + kzzˆ Evanescent wave ε2 µo ε1 > ε2 r E()rr = yˆ E e− j ()−kx x +kz z + yˆ ΓE e− j (k x x +kz z) 2 2 2 x>0 i i kz + kx = ω µo ε1 Γ = 1 when θi > θc When θ i > θ c : kx = − jα x r E()rr = yˆ T E e− j kz z e−α x x 2 2 2 x<0 i kz − α x = ω µo ε2 ECE 303 – Fall 2005 – Farhan Rana – Cornell University Dielectric Waveguides - II x ε2 µo Evanescent wave cladding Ei E ε1 µo r i r k E r k i r kr i core Hi θi θi Hi ε1 > ε2 z Hr cladding Evanescent wave ε2 µo One can have a guided wave that is bouncing between two dielectric interfaces due to total internal reflection and moving in the z-direction ECE 303 – Fall 2005 – Farhan Rana – Cornell University 2 Dielectric Slab Waveguides W 2d Assumption: W >> d x cladding y core -

High Gain Slotted Waveguide Antenna Based on Beam Focusing Using Electrically Split Ring Resonator Metasurface Employing Negative Refractive Index Medium
Progress In Electromagnetics Research C, Vol. 79, 115–126, 2017 High Gain Slotted Waveguide Antenna Based on Beam Focusing Using Electrically Split Ring Resonator Metasurface Employing Negative Refractive Index Medium Adel A. A. Abdelrehim and Hooshang Ghafouri-Shiraz* Abstract—In this paper, a new high performance slotted waveguide antenna incorporated with negative refractive index metamaterial structure is proposed, designed and experimentally demonstrated. The metamaterial structure is constructed from a multilayer two-directional structure of electrically split ring resonator which exhibits negative refractive index in direction of the radiated wave propagation when it is placed in front of the slotted waveguide antenna. As a result, the radiation beams of the slotted waveguide antenna are focused in both E and H planes, and hence the directivity and the gain are improved, while the beam area is reduced. The proposed antenna and the metamaterial structure operating at 10 GHz are designed, optimized and numerically simulated by using CST software. The effective parameters of the eSRR structure are extracted by Nicolson Ross Weir (NRW) algorithm from the s-parameters. For experimental verification, a proposed antenna operating at 10 GHz is fabricated using both wet etching microwave integrated circuit technique (for the metamaterial structure) and milling technique (for the slotted waveguide antenna). The measurements are carried out in an anechoic chamber. The measured results show that the E plane gain of the proposed slotted waveguide antenna is improved from 6.5 dB to 11 dB as compared to the conventional slotted waveguide antenna. Also, the E plane beamwidth is reduced from 94.1 degrees to about 50 degrees. -
Waveguide Direction User Manual
WaveGuide Direction Ex. Certified User Manual WaveGuide Direction Ex. Certified User Manual Applicable for product no. WG-DR40-EX Related to software versions: wdr 4.#-# Version 4.0 21st of November 2016 Radac B.V. Elektronicaweg 16b 2628 XG Delft The Netherlands tel: +31(0)15 890 3203 e-mail: [email protected] website: www.radac.nl Preface This user manual and technical documentation is intended for engineers and technicians involved in the software and hardware setup of the Ex. certified version of the WaveGuide Direction. Note All connections to the instrument must be made with shielded cables with exception of the mains. The shielding must be grounded in the cable gland or in the terminal compartment on both ends of the cable. For more information regarding wiring and cable specifications, please refer to Chapter 2. Legal aspects The mechanical and electrical installation shall only be carried out by trained personnel with knowledge of the local requirements and regulations for installation of electronic equipment. The information in this installation guide is the copyright property of Radac BV. Radac BV disclaims any responsibility for personal injury or damage to equipment caused by: Deviation from any of the prescribed procedures. • Execution of activities that are not prescribed. • Neglect of the general safety precautions for handling tools and use of electricity. • The contents, descriptions and specifications in this installation guide are subject to change without notice. Radac BV accepts no responsibility for any errors that may appear in this user manual. Additional information Please do not hesitate to contact Radac or its representative if you require additional information. -

The Self-Resonance and Self-Capacitance of Solenoid Coils: Applicable Theory, Models and Calculation Methods
1 The self-resonance and self-capacitance of solenoid coils: applicable theory, models and calculation methods. By David W Knight1 Version2 1.00, 4th May 2016. DOI: 10.13140/RG.2.1.1472.0887 Abstract The data on which Medhurst's semi-empirical self-capacitance formula is based are re-analysed in a way that takes the permittivity of the coil-former into account. The updated formula is compared with theories attributing self-capacitance to the capacitance between adjacent turns, and also with transmission-line theories. The inter-turn capacitance approach is found to have no predictive power. Transmission-line behaviour is corroborated by measurements using an induction loop and a receiving antenna, and by visualising the electric field using a gas discharge tube. In-circuit solenoid self-capacitance determinations show long-coil asymptotic behaviour corresponding to a wave propagating along the helical conductor with a phase-velocity governed by the local refractive index (i.e., v = c if the medium is air). This is consistent with measurements of transformer phase error vs. frequency, which indicate a constant time delay. These observations are at odds with the fact that a long solenoid in free space will exhibit helical propagation with a frequency-dependent phase velocity > c. The implication is that unmodified helical-waveguide theories are not appropriate for the prediction of self-capacitance, but they remain applicable in principle to open- circuit systems, such as Tesla coils, helical resonators and loaded vertical antennas, despite poor agreement with actual measurements. A semi-empirical method is given for predicting the first self- resonance frequencies of free coils by treating the coil as a helical transmission-line terminated by its own axial-field and fringe-field capacitances. -

Complex Numbers and Phasor Technique
RaoApp-Av3.qxd 12/18/03 5:44 PM Page 779 APPENDIX A Complex Numbers and Phasor Technique In this appendix, we discuss a mathematical technique known as the phasor technique, pertinent to operations involving sinusoidally time-varying quanti- ties.The technique simplifies the solution of a differential equation in which the steady-state response for a sinusoidally time-varying excitation is to be deter- mined, by reducing the differential equation to an algebraic equation involving phasors. A phasor is a complex number or a complex variable. We first review complex numbers and associated operations. A complex number has two parts: a real part and an imaginary part. Imag- inary numbers are square roots of negative real numbers. To introduce the con- cept of an imaginary number, we define 2-1 = j (A.1a) or ;j 2 =-1 (A.1b) 1 2 Thus, j5 is the positive square root of -25, -j10 is the negative square root of -100, and so on.A complex number is written in the form a + jb, where a is the real part and b is the imaginary part. Examples are 3 + j4 -4 + j1 -2 - j2 2 - j3 A complex number is represented graphically in a complex plane by using Rectangular two orthogonal axes, corresponding to the real and imaginary parts, as shown in form Fig.A.1, in which are plotted the numbers just listed. Since the set of orthogonal axes resembles the rectangular coordinate axes, the representation a + jb is 1 2 known as the rectangular form. 779 RaoApp-Av3.qxd 12/18/03 5:44 PM Page 780 780 Appendix A Complex Numbers and Phasor Technique Imaginary (3 ϩ j4) 4 (Ϫ4 ϩ j1) 1 Ϫ2 2 Ϫ 4 0 3 Real Ϫ2 (Ϫ2 Ϫj2) Ϫ3 Ϫ FIGURE A.1 (2 j3) Graphical representation of complex numbers in rectangular form. -

Ec6503 - Transmission Lines and Waveguides Transmission Lines and Waveguides Unit I - Transmission Line Theory 1
EC6503 - TRANSMISSION LINES AND WAVEGUIDES TRANSMISSION LINES AND WAVEGUIDES UNIT I - TRANSMISSION LINE THEORY 1. Define – Characteristic Impedance [M/J–2006, N/D–2006] Characteristic impedance is defined as the impedance of a transmission line measured at the sending end. It is given by 푍 푍0 = √ ⁄푌 where Z = R + jωL is the series impedance Y = G + jωC is the shunt admittance 2. State the line parameters of a transmission line. The line parameters of a transmission line are resistance, inductance, capacitance and conductance. Resistance (R) is defined as the loop resistance per unit length of the transmission line. Its unit is ohms/km. Inductance (L) is defined as the loop inductance per unit length of the transmission line. Its unit is Henries/km. Capacitance (C) is defined as the shunt capacitance per unit length between the two transmission lines. Its unit is Farad/km. Conductance (G) is defined as the shunt conductance per unit length between the two transmission lines. Its unit is mhos/km. 3. What are the secondary constants of a line? The secondary constants of a line are 푍 i. Characteristic impedance, 푍0 = √ ⁄푌 ii. Propagation constant, γ = α + jβ 4. Why the line parameters are called distributed elements? The line parameters R, L, C and G are distributed over the entire length of the transmission line. Hence they are called distributed parameters. They are also called primary constants. The infinite line, wavelength, velocity, propagation & Distortion line, the telephone cable 5. What is an infinite line? [M/J–2012, A/M–2004] An infinite line is a line where length is infinite. -
High-Index Glass Waveguides for AR Roadmap to Consumer Market
High-Index Glass Waveguides for AR Roadmap to Consumer Market Dr. Xavier Lafosse Commercial Technology Director, Advanced Optics SPIE AR / VR / MR Conference February 2-4, 2020 Outline • Enabling the Display Industry Through Glass Innovations • Our Solutions for Augmented Reality Applications • The Challenges for Scalable and Cost-Effective Solutions Precision Glass Solutions © 2020 Corning Incorporated 2 Corning’s glass innovations have enabled displays for more than 80 years… 1939 1982 2019 Cathode ray tubes for Liquid crystal display (LCD) EAGLE XG® Glass is the black and white televisions glass for monitors, laptops LCD industry standard Precision Glass Solutions © 2020 Corning Incorporated 3 Corning is a world-renowned innovator and supplier across the display industry Cover Glass Glass For AR/MR Display for Display Waveguides Display Technologies Introduced glass panels for 1st active 12 years of innovation in cover Corning Precision Glass Solutions matrix LCD devices in 1980s glass for smartphones, laptops, (PGS) was the first to market with tablets & wearables ultra-flat, high-index wafers for top- Have sold 25 billion square feet of tier consumer electronic companies ® ® ® ® flagship Corning EAGLE XG Corning Gorilla Glass is now on pursuing augmented reality and more than 7 billion devices worldwide mixed reality waveguide displays Precision Glass Solutions © 2020 Corning Incorporated 4 PGS offers best-in-class glass substrates for semiconductor and consumer electronics applications Advanced Low-loss, low Wafer-level Waveguide -

Modal Propagation and Excitation on a Wire-Medium Slab
1112 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 56, NO. 5, MAY 2008 Modal Propagation and Excitation on a Wire-Medium Slab Paolo Burghignoli, Senior Member, IEEE, Giampiero Lovat, Member, IEEE, Filippo Capolino, Senior Member, IEEE, David R. Jackson, Fellow, IEEE, and Donald R. Wilton, Life Fellow, IEEE Abstract—A grounded wire-medium slab has recently been shown to support leaky modes with azimuthally independent propagation wavenumbers capable of radiating directive omni- directional beams. In this paper, the analysis is generalized to wire-medium slabs in air, extending the omnidirectionality prop- erties to even modes, performing a parametric analysis of leaky modes by varying the geometrical parameters of the wire-medium lattice, and showing that, in the long-wavelength regime, surface modes cannot be excited at the interface between the air and wire medium. The electric field excited at the air/wire-medium interface by a horizontal electric dipole parallel to the wires is also studied by deriving the relevant Green’s function for the homogenized slab model. When the near field is dominated by a leaky mode, it is found to be azimuthally independent and almost perfectly linearly polarized. This result, which has not been previ- ously observed in any other leaky-wave structure for a single leaky mode, is validated through full-wave moment-method simulations of an actual wire-medium slab with a finite size. Index Terms—Leaky modes, metamaterials, near field, planar Fig. 1. (a) Wire-medium slab in air with the relevant coordinate axes. (b) Transverse view of the wire-medium slab with the relevant geometrical slab, wire medium.