Relativistic Electrodynamics with Minkowski Spacetime Algebra
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Physics 325: General Relativity Spring 2019 Problem Set 2
Physics 325: General Relativity Spring 2019 Problem Set 2 Due: Fri 8 Feb 2019. Reading: Please skim Chapter 3 in Hartle. Much of this should be review, but probably not all of it|be sure to read Box 3.2 on Mach's principle. Then start on Chapter 6. Problems: 1. Spacetime interval. Hartle Problem 4.13. 2. Four-vectors. Hartle Problem 5.1. 3. Lorentz transformations and hyperbolic geometry. In class, we saw that a Lorentz α0 α β transformation in 2D can be written as a = L β(#)a , that is, 0 ! ! ! a0 cosh # − sinh # a0 = ; (1) a10 − sinh # cosh # a1 where a is spacetime vector. Here, the rapidity # is given by tanh # = β; cosh # = γ; sinh # = γβ; (2) where v = βc is the velocity of frame S0 relative to frame S. (a) Show that two successive Lorentz boosts of rapidity #1 and #2 are equivalent to a single α γ α Lorentz boost of rapidity #1 +#2. In other words, check that L γ(#1)L(#2) β = L β(#1 +#2), α where L β(#) is the matrix in Eq. (1). You will need the following hyperbolic trigonometry identities: cosh(#1 + #2) = cosh #1 cosh #2 + sinh #1 sinh #2; (3) sinh(#1 + #2) = sinh #1 cosh #2 + cosh #1 sinh #2: (b) From Eq. (3), deduce the formula for tanh(#1 + #2) in terms of tanh #1 and tanh #2. For the appropriate choice of #1 and #2, use this formula to derive the special relativistic velocity tranformation rule V − v V 0 = : (4) 1 − vV=c2 Physics 325, Spring 2019: Problem Set 2 p. -

RELATIVE REALITY a Thesis
RELATIVE REALITY _______________ A thesis presented to the faculty of the College of Arts & Sciences of Ohio University _______________ In partial fulfillment of the requirements for the degree Master of Science ________________ Gary W. Steinberg June 2002 © 2002 Gary W. Steinberg All Rights Reserved This thesis entitled RELATIVE REALITY BY GARY W. STEINBERG has been approved for the Department of Physics and Astronomy and the College of Arts & Sciences by David Onley Emeritus Professor of Physics and Astronomy Leslie Flemming Dean, College of Arts & Sciences STEINBERG, GARY W. M.S. June 2002. Physics Relative Reality (41pp.) Director of Thesis: David Onley The consequences of Einstein’s Special Theory of Relativity are explored in an imaginary world where the speed of light is only 10 m/s. Emphasis is placed on phenomena experienced by a solitary observer: the aberration of light, the Doppler effect, the alteration of the perceived power of incoming light, and the perception of time. Modified ray-tracing software and other visualization tools are employed to create a video that brings this imaginary world to life. The process of creating the video is detailed, including an annotated copy of the final script. Some of the less explored aspects of relativistic travel—discovered in the process of generating the video—are discussed, such as the perception of going backwards when actually accelerating from rest along the forward direction. Approved: David Onley Emeritus Professor of Physics & Astronomy 5 Table of Contents ABSTRACT........................................................................................................4 -

Voigt Transformations in Retrospect: Missed Opportunities?
Voigt transformations in retrospect: missed opportunities? Olga Chashchina Ecole´ Polytechnique, Palaiseau, France∗ Natalya Dudisheva Novosibirsk State University, 630 090, Novosibirsk, Russia† Zurab K. Silagadze Novosibirsk State University and Budker Institute of Nuclear Physics, 630 090, Novosibirsk, Russia.‡ The teaching of modern physics often uses the history of physics as a didactic tool. However, as in this process the history of physics is not something studied but used, there is a danger that the history itself will be distorted in, as Butterfield calls it, a “Whiggish” way, when the present becomes the measure of the past. It is not surprising that reading today a paper written more than a hundred years ago, we can extract much more of it than was actually thought or dreamed by the author himself. We demonstrate this Whiggish approach on the example of Woldemar Voigt’s 1887 paper. From the modern perspective, it may appear that this paper opens a way to both the special relativity and to its anisotropic Finslerian generalization which came into the focus only recently, in relation with the Cohen and Glashow’s very special relativity proposal. With a little imagination, one can connect Voigt’s paper to the notorious Einstein-Poincar´epri- ority dispute, which we believe is a Whiggish late time artifact. We use the related historical circumstances to give a broader view on special relativity, than it is usually anticipated. PACS numbers: 03.30.+p; 1.65.+g Keywords: Special relativity, Very special relativity, Voigt transformations, Einstein-Poincar´epriority dispute I. INTRODUCTION Sometimes Woldemar Voigt, a German physicist, is considered as “Relativity’s forgotten figure” [1]. -
Chapter 2: Minkowski Spacetime
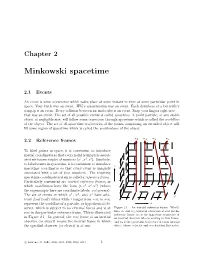
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

The “Fine Structure” of Special Relativity and the Thomas Precession
Annales de la Fondation Louis de Broglie, Volume 29 no 1-2, 2004 57 The “fine structure” of Special Relativity and the Thomas precession Yves Pierseaux Inter-university Institute for High Energy Universit´e Libre de Bruxelles (ULB) e-mail: [email protected] RESUM´ E.´ La relativit´e restreinte (RR) standard est essentiellement un mixte entre la cin´ematique d’Einstein et la th´eorie des groupes de Poincar´e. Le sous-groupe des transformations unimodulaires (boosts scalaires) implique que l’invariant fondamental de Poincar´e n’est pas le quadri-intervalle mais le quadri-volume. Ce dernier d´efinit non seulement des unit´es de mesure, compatibles avec l’invariance de la vitesse de la lumi`ere, mais aussi une diff´erentielle scalaire exacte.Le quadri-intervalle d’Einstein-Minkowski n´ecessite une d´efinition non- euclidienne de la distance spatio-temporelle et l’introduction d’une diff´erentielle non-exacte,l’´el´ement de temps propre. Les boost scalaires de Poincar´e forment un sous-groupe du groupe g´en´eral (avec deux rotations spatiales). Ce n’est pas le cas des boosts vectoriels d’Einstein ´etroitement li´es `alad´efinition du temps pro- pre et du syst`eme propre. Les deux rotations spatiales de Poincar´e n’apportent pas de physique nouvelle alors que la pr´ecession spatiale introduite par Thomas en 1926 pour une succession de boosts non- 1 parall`eles corrige (facteur 2 ) la valeur calcul´ee classiquement du mo- ment magn´etique propre de l’´electron. Si la relativit´e de Poincar´e est achev´ee en 1908, c’est Thomas qui apporte en 1926 la touche finale `a la cin´ematique d’Einstein-Minkowski avec une d´efinition correcte et compl`ete (transport parall`ele) du syst`eme propre. -

7. Special Relativity
7. Special Relativity Although Newtonian mechanics gives an excellent description of Nature, it is not uni- versally valid. When we reach extreme conditions — the very small, the very heavy or the very fast — the Newtonian Universe that we’re used to needs replacing. You could say that Newtonian mechanics encapsulates our common sense view of the world. One of the major themes of twentieth century physics is that when you look away from our everyday world, common sense is not much use. One such extreme is when particles travel very fast. The theory that replaces New- tonian mechanics is due to Einstein. It is called special relativity.Thee↵ectsofspecial relativity become apparent only when the speeds of particles become comparable to the speed of light in the vacuum. The speed of light is 1 c =299792458ms− This value of c is exact. It may seem strange that the speed of light is an integer when measured in meters per second. The reason is simply that this is taken to be the definition of what we mean by a meter: it is the distance travelled by light in 1/299792458 seconds. For the purposes of this course, we’ll be quite happy with the 8 1 approximation c 3 10 ms− . ⇡ ⇥ The first thing to say is that the speed of light is fast. Really fast. The speed of 1 4 1 sound is around 300 ms− ;escapevelocityfromtheEarthisaround10 ms− ;the 5 1 orbital speed of our solar system in the Milky Way galaxy is around 10 ms− . As we shall soon see, nothing travels faster than c. -

Chapter 3: Relativistic Dynamics
Chapter 3 Relativistic dynamics A particle subject to forces will undergo non-inertial motion. According to Newton, there is a simple relation between force and acceleration, f~ = m~a; (3.0.1) and acceleration is the second time derivative of position, d~v d2~x ~a = = : (3.0.2) dt dt2 There is just one problem with these relations | they are wrong! Newtonian dynamics is a good approximation when velocities are very small compared to c, but outside this regime the relation (3.0.1) is simply incorrect. In particular, these relations are inconsistent with our relativity postu- lates. To see this, it is sufficient to note that Newton's equations (3.0.1) and (3.0.2) predict that a particle subject to a constant force (and initially at rest) will acquire a velocity which can become arbitrarily large, Z t ~ d~v 0 f ~v(t) = 0 dt = t −! 1 as t ! 1 . (3.0.3) 0 dt m This flatly contradicts the prediction of special relativity (and causality) that no signal can propagate faster than c. Our task is to understand how to formulate the dynamics of non-inertial particles in a manner which is consistent with our relativity postulates (and then verify that it matches observation). 3.1 Proper time The result of solving for the dynamics of some object subject to known forces should be a prediction for its position as a function of time. But whose time? One can adopt a particular reference frame, and then ask to find the spacetime position of the object as a function of coordinate time t in the chosen frame, xµ(t), where as always, x0 ≡ c t. -

Heavy Quark Energy Loss Far from Equilibrium in a Strongly Coupled Collision
Heavy quark energy loss far from equilibrium in a strongly coupled collision The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Chesler, Paul M., Mindaugas Lekaveckas, and Krishna Rajagopal. “Heavy Quark Energy Loss Far from Equilibrium in a Strongly Coupled Collision.” J. High Energ. Phys. 2013, no. 10 (October 2013). As Published http://dx.doi.org/10.1007/jhep10(2013)013 Publisher Springer-Verlag Version Final published version Citable link http://hdl.handle.net/1721.1/88553 Terms of Use Creative Commons Attribution Detailed Terms http://creativecommons.org/licenses/by/4.0/ Published for SISSA by Springer Received: June 26, 2013 Accepted: September 4, 2013 Published: October 2, 2013 Heavy quark energy loss far from equilibrium in a strongly coupled collision JHEP10(2013)013 Paul M. Chesler,a Mindaugas Lekaveckasa;b and Krishna Rajagopala;b aCenter for Theoretical Physics, Massachusetts Institute of Technology, Cambridge, MA 02139, U.S.A. bPhysics Department, Theory Unit, CERN, CH-1211 Gen`eve23, Switzerland E-mail: [email protected], [email protected], [email protected] Abstract: We compute and study the drag force acting on a heavy quark propagating through the matter produced in the collision of two sheets of energy in a strongly coupled gauge theory that can be analyzed holographically. Although this matter is initially far from equilibrium, we find that the equilibrium expression for heavy quark energy loss in a homogeneous strongly coupled plasma with the same instantaneous energy density or pressure as that at the location of the quark describes many qualitative features of our results. -

Gravitation with Cosmological Term, Expansion of the Universe As Uniform Acceleration in Clifford Coordinates
S S symmetry Article Gravitation with Cosmological Term, Expansion of the Universe as Uniform Acceleration in Clifford Coordinates Alexander Kritov Faculty of Physics Moscow, Lomonosov Moscow State University, 119991 Moscow, Russia; [email protected] Abstract: This paper presents a novel approach to the cosmological constant problem by the use of the Clifford algebras of space Cl3,0 and anti-space Cl0,3 with a particular focus on the paravec- tor representation, emphasizing the fact that both algebras have a center represented just by two coordinates. Since the paravector representation allows assigning the scalar element of grade 0 to the time coordinate, we consider the relativity in such two-dimensional spacetime for a uniformly accelerated frame with the constant acceleration 3H0c. Using the Rindler coordinate transformations in two-dimensional spacetime and then applying it to Minkowski coordinates, we obtain the FLRW metric, which in the case of the Clifford algebra of space Cl3,0 corresponds to the anti-de Sitter (AdS) flat (k = 0) case, the negative cosmological term and an oscillating model of the universe. The approach with anti-Euclidean Clifford algebra Cl0,3 leads to the de Sitter model with the positive cosmological term and the exact form of the scale factor used in modern cosmology. Keywords: cosmological constant problem; Clifford algebras; Cl(3,0); Cl(0,3); two-dimensional spacetime; time-volume coordinates; uniform acceleration 3Hc; Rindler coordinates; FLRW metric; scale factor; AdS and de Sitter models Citation: Kritov, A. Gravitation with The problem of the cosmologicalor L term is a long standing subject since being the Cosmological Term, Expansion of the Einstein’s “biggest blunder”. -
Physics 523, General Relativity
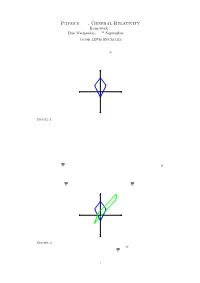
Physics 523, General Relativity Homework 1 Due Wednesday, 27th September 2006 Jacob Lewis Bourjaily Problem 1 a) We are to use the spacetime diagram of an observer O to describe an `experiment' speci¯ed by the problem 1.5 in Schutz' text. We have shown the spacetime diagram in Figure 1 below. t x Figure 1. A spacetime diagram representing the experiment which was required to be described in Problem 1.a. b) The experimenter observes that the two particles arrive back at the same point in spacetime after leaving from equidistant sources. The experimenter argues that this implies that they were released `simultaneously;' comment. In his frame, his reasoning is just, and implies that his t-coordinates of the two events have the same value. However, there is no absolute simultaneity in spacetime, so a di®erent observer would be free to say that in her frame, the two events were not simultaneous. c) A second observer O moves with speed v = 3c=4 in the negative x-direction relative to O. We are asked to draw the corresponding spacetime diagram of the experiment in this frame and comment on simultaneity. Calculating the transformation by hand (so the image is accurate), the experiment ob- served in frame O is shown in Figure 2. Notice that observer O does not see the two emission events as occurring simultaneously. t x Figure 2. A spacetime diagram representing the experiment in two di®erent frames. The worldlines in blue represent those recorded by observer O and those in green rep- resent the event as recorded by an observer in frame O. -

Understanding the Gravitational and Cosmological Redshifts As Doppler
Understanding the gravitational and cosmological redshifts as Doppler shifts by gravitational phase factors Mingzhe Li∗ Interdisciplinary Center for Theoretical Study, University of Science and Technology of China, Hefei, Anhui 230026, China From the viewpoint of gauge gravitational theories, the path dependent gravitational phase fac- tors define the Lorentz transformations between the local inertial coordinate systems of different positions. With this point we show that the spectral shifts in the curved spacetime, such as the gravitational and cosmological redshifts, can be understood as Doppler shifts. All these shifts are interpreted in a unified way as being originated from the relative motion of the free falling observers instantaneously static with the wave source and the receiver respectively. The gravitational phase factor of quantum systems in the curved spacetime is also discussed. PACS numbers: 04.20.Cv, 04.62.+v, 98.80.Jk USTC-ICTS-14-01 I. INTRODUCTION As is well known, the received wavelength of a wave propagating in the flat spacetime (without gravity) will get shift if the receiver has a velocity relative to the source. This is the Doppler effect, a pure kinematical phenomenon. It only depends on the relative velocity of the instantaneous rest inertial frames of the source and the receiver. No dynamical laws are needed. According to special relativity, the coordinate systems of two inertial frames are related by Poincar´eor inhomogeneous Lorentz transformation, i.e., the homogeneous Lorentz transformation plus a spacetime translation. The relative motion, due to which the Doppler effect takes place, corresponds to a Lorentz boost. We also encounter other spectral shifts in the curved spacetime when the gravity is turned on. -

Spacetime Trigonometry DRAFT Version: 7/21/2006 1
AAPT Topical Conference: Teaching General Relativity to Undergraduates AAPT Summer Meeting 1 Syracuse, NY, July 20-21,22-26 2006 New Ideas for Teaching Relativity: Space-Time Trigonometry Rob Salgado Syracuse University [email protected] Department of Physics In the teaching of Relativity, there are many references to analogues: • – physical concepts in Galilean and Special Relativity – mathematical concepts in Euclidean and Minkowskian geometry There is a known (but not well-known) relationship • among the Euclidean, Galilean and Minkowskian geometries: – They are the “affine Cayley-Klein geometries”. (The de Sitter spacetimes are among the Cayley-Klein geometries.) We exploit this fact to develop a new presentation of relativity, • which may be useful for teaching high-school and college students. eventual Goal: • Introduce some “spacetime intuition” earlier in the curriculum. Goal for this poster: Highlight the foundations of this approach. • What makes this formulation interesting is that • the geometry of Galilean Relativity acts like a • “bridge”from Euclidean geometry to Special Relativity. a faithful visualization of tensor-algebra • can be incorporated a A trigonometric analogy (Yaglom) 2 aI.M. Yaglom, A Simple Non-Euclidean Geometry and Its Physical Basis (1979). Euclidean rotation 1 v t′ = (cos θ)t +( sin θ)y t′ = t + − y − √1+v2 √1+v2 v 1 y′ = ( sin θ)t +( cos θ)y y′ = t + y √1+v2 √1+v2 where v = tan θ. Galilean boost transformation t′ =(cosg θ)t +(0sing θ)y t′ = 1 t y′ =(sing θ)t +( cosg θ)y y′ = v t + 1 y where v = tang θ. θ Yaglom defines cosg θ 1, sing θ θ so that tang θ sing θ.