Physics 557 – Lecture 4 Relativistic Notation, Kinematics and Symmetries
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Newtonian Gravity and Special Relativity 12.1 Newtonian Gravity
Physics 411 Lecture 12 Newtonian Gravity and Special Relativity Lecture 12 Physics 411 Classical Mechanics II Monday, September 24th, 2007 It is interesting to note that under Lorentz transformation, while electric and magnetic fields get mixed together, the force on a particle is identical in magnitude and direction in the two frames related by the transformation. Indeed, that was the motivation for looking at the manifestly relativistic structure of Maxwell's equations. The idea was that Maxwell's equations and the Lorentz force law are automatically in accord with the notion that observations made in inertial frames are physically equivalent, even though observers may disagree on the names of these forces (electric or magnetic). Today, we will look at a force (Newtonian gravity) that does not have the property that different inertial frames agree on the physics. That will lead us to an obvious correction that is, qualitatively, a prediction of (linearized) general relativity. 12.1 Newtonian Gravity We start with the experimental observation that for a particle of mass M and another of mass m, the force of gravitational attraction between them, according to Newton, is (see Figure 12.1): G M m F = − RR^ ≡ r − r 0: (12.1) r 2 From the force, we can, by analogy with electrostatics, construct the New- tonian gravitational field and its associated point potential: GM GM G = − R^ = −∇ − : (12.2) r 2 r | {z } ≡φ 1 of 7 12.2. LINES OF MASS Lecture 12 zˆ m !r M !r ! yˆ xˆ Figure 12.1: Two particles interacting via the Newtonian gravitational force. -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Physics 325: General Relativity Spring 2019 Problem Set 2
Physics 325: General Relativity Spring 2019 Problem Set 2 Due: Fri 8 Feb 2019. Reading: Please skim Chapter 3 in Hartle. Much of this should be review, but probably not all of it|be sure to read Box 3.2 on Mach's principle. Then start on Chapter 6. Problems: 1. Spacetime interval. Hartle Problem 4.13. 2. Four-vectors. Hartle Problem 5.1. 3. Lorentz transformations and hyperbolic geometry. In class, we saw that a Lorentz α0 α β transformation in 2D can be written as a = L β(#)a , that is, 0 ! ! ! a0 cosh # − sinh # a0 = ; (1) a10 − sinh # cosh # a1 where a is spacetime vector. Here, the rapidity # is given by tanh # = β; cosh # = γ; sinh # = γβ; (2) where v = βc is the velocity of frame S0 relative to frame S. (a) Show that two successive Lorentz boosts of rapidity #1 and #2 are equivalent to a single α γ α Lorentz boost of rapidity #1 +#2. In other words, check that L γ(#1)L(#2) β = L β(#1 +#2), α where L β(#) is the matrix in Eq. (1). You will need the following hyperbolic trigonometry identities: cosh(#1 + #2) = cosh #1 cosh #2 + sinh #1 sinh #2; (3) sinh(#1 + #2) = sinh #1 cosh #2 + cosh #1 sinh #2: (b) From Eq. (3), deduce the formula for tanh(#1 + #2) in terms of tanh #1 and tanh #2. For the appropriate choice of #1 and #2, use this formula to derive the special relativistic velocity tranformation rule V − v V 0 = : (4) 1 − vV=c2 Physics 325, Spring 2019: Problem Set 2 p. -

Derivation of Generalized Einstein's Equations of Gravitation in Some
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 5 February 2021 doi:10.20944/preprints202102.0157.v1 Derivation of generalized Einstein's equations of gravitation in some non-inertial reference frames based on the theory of vacuum mechanics Xiao-Song Wang Institute of Mechanical and Power Engineering, Henan Polytechnic University, Jiaozuo, Henan Province, 454000, China (Dated: Dec. 15, 2020) When solving the Einstein's equations for an isolated system of masses, V. Fock introduces har- monic reference frame and obtains an unambiguous solution. Further, he concludes that there exists a harmonic reference frame which is determined uniquely apart from a Lorentz transformation if suitable supplementary conditions are imposed. It is known that wave equations keep the same form under Lorentz transformations. Thus, we speculate that Fock's special harmonic reference frames may have provided us a clue to derive the Einstein's equations in some special class of non-inertial reference frames. Following this clue, generalized Einstein's equations in some special non-inertial reference frames are derived based on the theory of vacuum mechanics. If the field is weak and the reference frame is quasi-inertial, these generalized Einstein's equations reduce to Einstein's equa- tions. Thus, this theory may also explain all the experiments which support the theory of general relativity. There exist some differences between this theory and the theory of general relativity. Keywords: Einstein's equations; gravitation; general relativity; principle of equivalence; gravitational aether; vacuum mechanics. I. INTRODUCTION p. 411). Theoretical interpretation of the small value of Λ is still open [6]. The Einstein's field equations of gravitation are valid 3. -

PHYS 402: Electricity & Magnetism II
PHYS 610: Electricity & Magnetism I Due date: Thursday, February 1, 2018 Problem set #2 1. Adding rapidities Prove that collinear rapidities are additive, i.e. if A has a rapidity relative to B, and B has rapidity relative to C, then A has rapidity + relative to C. 2. Velocity transformation Consider a particle moving with velocity 푢⃗ = (푢푥, 푢푦, 푢푧) in frame S. Frame S’ moves with velocity 푣 = 푣푧̂ in S. Show that the velocity 푢⃗ ′ = (푢′푥, 푢′푦, 푢′푧) of the particle as measured in frame S’ is given by the following expressions: 푑푥′ 푢푥 푢′푥 = = 2 푑푡′ 훾(1 − 푣푢푧/푐 ) 푑푦′ 푢푦 푢′푦 = = 2 푑푡′ 훾(1 − 푣푢푧/푐 ) 푑푧′ 푢푧 − 푣 푢′푧 = = 2 푑푡′ (1 − 푣푢푧/푐 ) Note that the velocity components perpendicular to the frame motion are transformed (as opposed to the Lorentz transformation of the coordinates of the particle). What is the physics for this difference in behavior? 3. Relativistic acceleration Jackson, problem 11.6. 4. Lorenz gauge Show that you can always find a gauge function 휆(푟 , 푡) such that the Lorenz gauge condition is satisfied (you may assume that a wave equation with an arbitrary source term is solvable). 5. Relativistic Optics An astronaut in vacuum uses a laser to produce an electromagnetic plane wave with electric amplitude E0' polarized in the y'-direction travelling in the positive x'-direction in an inertial reference frame S'. The astronaut travels with velocity v along the +z-axis in the S inertial frame. a) Write down the electric and magnetic fields for this propagating plane wave in the S' inertial frame – you are free to pick the phase convention. -

The Lorentz Transformation
The Lorentz Transformation Karl Stratos 1 The Implications of Self-Contained Worlds It sucks to have an upper bound of light speed on velocity (especially for those who demand space travel). Being able to loop around the globe seven times and a half in one second is pretty fast, but it's still far from infinitely fast. Light has a definite speed, so why can't we just reach it, and accelerate a little bit more? This unfortunate limitation follows from certain physical facts of the universe. • Maxwell's equations enforce a certain speed for light waves: While de- scribing how electric and magnetic fields interact, they predict waves that move at around 3 × 108 meters per second, which are established to be light waves. • Inertial (i.e., non-accelerating) frames of reference are fully self-contained, with respect to the physical laws: For illustration, Galileo observed in a steadily moving ship that things were indistinguishable from being on terra firma. The physical laws (of motion) apply exactly the same. People concocted a medium called the \aether" through which light waves trav- eled, like sound waves through the air. But then inertial frames of reference are not self-contained, because if one moves at a different velocity from the other, it will experience a different light speed with respect to the common aether. This violates the results from Maxwell's equations. That is, light beams in a steadily moving ship will be distinguishable from being on terra firma; the physical laws (of Maxwell's equations) do not apply the same. -

RELATIVE REALITY a Thesis
RELATIVE REALITY _______________ A thesis presented to the faculty of the College of Arts & Sciences of Ohio University _______________ In partial fulfillment of the requirements for the degree Master of Science ________________ Gary W. Steinberg June 2002 © 2002 Gary W. Steinberg All Rights Reserved This thesis entitled RELATIVE REALITY BY GARY W. STEINBERG has been approved for the Department of Physics and Astronomy and the College of Arts & Sciences by David Onley Emeritus Professor of Physics and Astronomy Leslie Flemming Dean, College of Arts & Sciences STEINBERG, GARY W. M.S. June 2002. Physics Relative Reality (41pp.) Director of Thesis: David Onley The consequences of Einstein’s Special Theory of Relativity are explored in an imaginary world where the speed of light is only 10 m/s. Emphasis is placed on phenomena experienced by a solitary observer: the aberration of light, the Doppler effect, the alteration of the perceived power of incoming light, and the perception of time. Modified ray-tracing software and other visualization tools are employed to create a video that brings this imaginary world to life. The process of creating the video is detailed, including an annotated copy of the final script. Some of the less explored aspects of relativistic travel—discovered in the process of generating the video—are discussed, such as the perception of going backwards when actually accelerating from rest along the forward direction. Approved: David Onley Emeritus Professor of Physics & Astronomy 5 Table of Contents ABSTRACT........................................................................................................4 -

Relativistic Electrodynamics with Minkowski Spacetime Algebra
Relativistic Electrodynamics with Minkowski Spacetime Algebra Walid Karam Azzubaidi nº 52174 Mestrado Integrado em Eng. Electrotécnica e de Computadores, Instituto Superior Técnico, Av. Rovisco Pais 1, 1049-001 Lisboa, Portugal. e-mail: [email protected] Abstract. The aim of this work is to study several electrodynamic effects using spacetime algebra – the geometric algebra of spacetime, which is supported on Minkowski spacetime. The motivation for submitting onto this investigation relies on the need to explore new formalisms which allow attaining simpler derivations with rational results. The practical applications for the examined themes are uncountable and diverse, such as GPS devices, Doppler ultra-sound, color space conversion, aerospace industry etc. The effects which will be analyzed include time dilation, space contraction, relativistic velocity addition for collinear vectors, Doppler shift, moving media and vacuum form reduction, Lorentz force, energy-momentum operator and finally the twins paradox with Doppler shift. The difference between active and passive Lorentz transformation is also established. The first regards a vector transformation from one frame to another, while the passive transformation is related to user interpretation, therefore considered passive interpretation, since two observers watch the same event with a different point of view. Regarding time dilation and length contraction in the theory of special relativity, one concludes that those parameters (time and length) are relativistic dimensions, since their -

Voigt Transformations in Retrospect: Missed Opportunities?
Voigt transformations in retrospect: missed opportunities? Olga Chashchina Ecole´ Polytechnique, Palaiseau, France∗ Natalya Dudisheva Novosibirsk State University, 630 090, Novosibirsk, Russia† Zurab K. Silagadze Novosibirsk State University and Budker Institute of Nuclear Physics, 630 090, Novosibirsk, Russia.‡ The teaching of modern physics often uses the history of physics as a didactic tool. However, as in this process the history of physics is not something studied but used, there is a danger that the history itself will be distorted in, as Butterfield calls it, a “Whiggish” way, when the present becomes the measure of the past. It is not surprising that reading today a paper written more than a hundred years ago, we can extract much more of it than was actually thought or dreamed by the author himself. We demonstrate this Whiggish approach on the example of Woldemar Voigt’s 1887 paper. From the modern perspective, it may appear that this paper opens a way to both the special relativity and to its anisotropic Finslerian generalization which came into the focus only recently, in relation with the Cohen and Glashow’s very special relativity proposal. With a little imagination, one can connect Voigt’s paper to the notorious Einstein-Poincar´epri- ority dispute, which we believe is a Whiggish late time artifact. We use the related historical circumstances to give a broader view on special relativity, than it is usually anticipated. PACS numbers: 03.30.+p; 1.65.+g Keywords: Special relativity, Very special relativity, Voigt transformations, Einstein-Poincar´epriority dispute I. INTRODUCTION Sometimes Woldemar Voigt, a German physicist, is considered as “Relativity’s forgotten figure” [1]. -

Arxiv:Gr-Qc/0507001V3 16 Oct 2005
October 29, 2018 21:28 WSPC/INSTRUCTION FILE ijmp˙october12 International Journal of Modern Physics D c World Scientific Publishing Company Gravitomagnetism and the Speed of Gravity Sergei M. Kopeikin Department of Physics and Astronomy, University of Missouri-Columbia, Columbia, Missouri 65211, USA [email protected] Experimental discovery of the gravitomagnetic fields generated by translational and/or rotational currents of matter is one of primary goals of modern gravitational physics. The rotational (intrinsic) gravitomagnetic field of the Earth is currently measured by the Gravity Probe B. The present paper makes use of a parametrized post-Newtonian (PN) expansion of the Einstein equations to demonstrate how the extrinsic gravitomag- netic field generated by the translational current of matter can be measured by observing the relativistic time delay caused by a moving gravitational lens. We prove that mea- suring the extrinsic gravitomagnetic field is equivalent to testing relativistic effect of the aberration of gravity caused by the Lorentz transformation of the gravitational field. We unfold that the recent Jovian deflection experiment is a null-type experiment testing the Lorentz invariance of the gravitational field (aberration of gravity), thus, confirming existence of the extrinsic gravitomagnetic field associated with orbital motion of Jupiter with accuracy 20%. We comment on erroneous interpretations of the Jovian deflection experiment given by a number of researchers who are not familiar with modern VLBI technique and subtleties of JPL ephemeris. We propose to measure the aberration of gravity effect more accurately by observing gravitational deflection of light by the Sun and processing VLBI observations in the geocentric frame with respect to which the Sun arXiv:gr-qc/0507001v3 16 Oct 2005 is moving with velocity ∼ 30 km/s. -
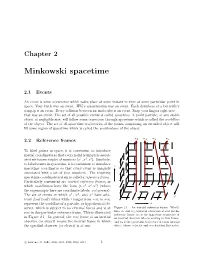
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
![Arxiv:2108.07786V2 [Physics.Class-Ph] 18 Aug 2021](https://docslib.b-cdn.net/cover/5874/arxiv-2108-07786v2-physics-class-ph-18-aug-2021-1795874.webp)
Arxiv:2108.07786V2 [Physics.Class-Ph] 18 Aug 2021
Demystifying the Lagrangians of Special Relativity Gerd Wagner1, ∗ and Matthew W. Guthrie2, † 1Mayener Str. 131, 56070 Koblenz, Germany 2 Department of Physics, University of Connecticut, Storrs, CT 06269 (Dated: August 19, 2021) Special relativity beyond its basic treatment can be inaccessible, in particular because introductory physics courses typically view special relativity as decontextualized from the rest of physics. We seek to place special relativity back in its physics context, and to make the subject approachable. The Lagrangian formulation of special relativity follows logically by combining the Lagrangian approach to mechanics and the postulates of special relativity. In this paper, we derive and explicate some of the most important results of how the Lagrangian formalism and Lagrangians themselves behave in the context of special relativity. We derive two foundations of special relativity: the invariance of any spacetime interval, and the Lorentz transformation. We then develop the Lagrangian formulation of relativistic particle dynamics, including the transformation law of the electromagnetic potentials, 2 the Lagrangian of a relativistic free particle, and Einstein’s mass-energy equivalence law (E = mc ). We include a discussion of relativistic field Lagrangians and their transformation properties, showing that the Lagrangians and the equations of motion for the electric and magnetic fields are indeed invariant under Lorentz transformations. arXiv:2108.07786v2 [physics.class-ph] 18 Aug 2021 ∗ [email protected] † [email protected] 2 I. Introduction A. Motivation Lagrangians link the relationship between equations of motion and coordinate systems. This is particularly impor- tant for special relativity, the foundations of which lie in considering the laws of physics within different coordinate systems (i.e., inertial reference frames).