The “Fine Structure” of Special Relativity and the Thomas Precession
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Thomas Precession and Thomas-Wigner Rotation: Correct Solutions and Their Implications
epl draft Header will be provided by the publisher This is a pre-print of an article published in Europhysics Letters 129 (2020) 3006 The final authenticated version is available online at: https://iopscience.iop.org/article/10.1209/0295-5075/129/30006 Thomas precession and Thomas-Wigner rotation: correct solutions and their implications 1(a) 2 3 4 ALEXANDER KHOLMETSKII , OLEG MISSEVITCH , TOLGA YARMAN , METIN ARIK 1 Department of Physics, Belarusian State University – Nezavisimosti Avenue 4, 220030, Minsk, Belarus 2 Research Institute for Nuclear Problems, Belarusian State University –Bobrujskaya str., 11, 220030, Minsk, Belarus 3 Okan University, Akfirat, Istanbul, Turkey 4 Bogazici University, Istanbul, Turkey received and accepted dates provided by the publisher other relevant dates provided by the publisher PACS 03.30.+p – Special relativity Abstract – We address to the Thomas precession for the hydrogenlike atom and point out that in the derivation of this effect in the semi-classical approach, two different successions of rotation-free Lorentz transformations between the laboratory frame K and the proper electron’s frames, Ke(t) and Ke(t+dt), separated by the time interval dt, were used by different authors. We further show that the succession of Lorentz transformations KKe(t)Ke(t+dt) leads to relativistically non-adequate results in the frame Ke(t) with respect to the rotational frequency of the electron spin, and thus an alternative succession of transformations KKe(t), KKe(t+dt) must be applied. From the physical viewpoint this means the validity of the introduced “tracking rule”, when the rotation-free Lorentz transformation, being realized between the frame of observation K and the frame K(t) co-moving with a tracking object at the time moment t, remains in force at any future time moments, too. -

Covariant Calculation of General Relativistic Effects in an Orbiting Gyroscope Experiment
PHYSICAL REVIEW D 67, 062003 ͑2003͒ Covariant calculation of general relativistic effects in an orbiting gyroscope experiment Clifford M. Will* McDonnell Center for the Space Sciences, Department of Physics, Washington University, St. Louis, Missouri 63130 ͑Received 17 December 2002; published 26 March 2003͒ We carry out a covariant calculation of the measurable relativistic effects in an orbiting gyroscope experi- ment. The experiment, currently known as Gravity Probe B, compares the spin directions of an array of spinning gyroscopes with the optical axis of a telescope, all housed in a spacecraft that rolls about the optical axis. The spacecraft is steered so that the telescope always points toward a known guide star. We calculate the variation in the spin directions relative to readout loops rigidly fixed in the spacecraft, and express the variations in terms of quantities that can be measured, to sufficient accuracy, using an Earth-centered coordi- nate system. The measurable effects include the aberration of starlight, the geodetic precession caused by space curvature, the frame-dragging effect caused by the rotation of the Earth and the deflection of light by the Sun. DOI: 10.1103/PhysRevD.67.062003 PACS number͑s͒: 04.80.Cc I. INTRODUCTION by the on-board telescope, which is to be trained on a star IM Pegasus ͑HR 8703͒ in our galaxy. One important feature of Gravity Probe B—the ‘‘gyroscope experiment’’—is a this star is that it is also a strong radio source, so that its NASA space experiment designed to measure the general direction and proper motion relative to the larger system of relativistic effect known as the dragging of inertial frames. -

Physics 325: General Relativity Spring 2019 Problem Set 2
Physics 325: General Relativity Spring 2019 Problem Set 2 Due: Fri 8 Feb 2019. Reading: Please skim Chapter 3 in Hartle. Much of this should be review, but probably not all of it|be sure to read Box 3.2 on Mach's principle. Then start on Chapter 6. Problems: 1. Spacetime interval. Hartle Problem 4.13. 2. Four-vectors. Hartle Problem 5.1. 3. Lorentz transformations and hyperbolic geometry. In class, we saw that a Lorentz α0 α β transformation in 2D can be written as a = L β(#)a , that is, 0 ! ! ! a0 cosh # − sinh # a0 = ; (1) a10 − sinh # cosh # a1 where a is spacetime vector. Here, the rapidity # is given by tanh # = β; cosh # = γ; sinh # = γβ; (2) where v = βc is the velocity of frame S0 relative to frame S. (a) Show that two successive Lorentz boosts of rapidity #1 and #2 are equivalent to a single α γ α Lorentz boost of rapidity #1 +#2. In other words, check that L γ(#1)L(#2) β = L β(#1 +#2), α where L β(#) is the matrix in Eq. (1). You will need the following hyperbolic trigonometry identities: cosh(#1 + #2) = cosh #1 cosh #2 + sinh #1 sinh #2; (3) sinh(#1 + #2) = sinh #1 cosh #2 + cosh #1 sinh #2: (b) From Eq. (3), deduce the formula for tanh(#1 + #2) in terms of tanh #1 and tanh #2. For the appropriate choice of #1 and #2, use this formula to derive the special relativistic velocity tranformation rule V − v V 0 = : (4) 1 − vV=c2 Physics 325, Spring 2019: Problem Set 2 p. -

Thomas Precession Is the Basis for the Structure of Matter and Space Preston Guynn
Thomas Precession is the Basis for the Structure of Matter and Space Preston Guynn To cite this version: Preston Guynn. Thomas Precession is the Basis for the Structure of Matter and Space. 2018. hal- 02628032 HAL Id: hal-02628032 https://hal.archives-ouvertes.fr/hal-02628032 Submitted on 26 May 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Thomas Precession is the Basis for the Structure of Matter and Space Einstein's theory of special relativity was incomplete as originally formulated since it did not include the rotational effect described twenty years later by Thomas, now referred to as Thomas precession. Though Thomas precession has been accepted for decades, its relationship to particle structure is a recent discovery, first described in an article titled "Electromagnetic effects and structure of particles due to special relativity". Thomas precession acts as a velocity dependent counter-rotation, so that at a rotation velocity of 3 / 2 c , precession is equal to rotation, resulting in an inertial frame of reference. During the last year and a half significant progress was made in determining further details of the role of Thomas precession in particle structure, fundamental constants, and the galactic rotation velocity. -

RELATIVE REALITY a Thesis
RELATIVE REALITY _______________ A thesis presented to the faculty of the College of Arts & Sciences of Ohio University _______________ In partial fulfillment of the requirements for the degree Master of Science ________________ Gary W. Steinberg June 2002 © 2002 Gary W. Steinberg All Rights Reserved This thesis entitled RELATIVE REALITY BY GARY W. STEINBERG has been approved for the Department of Physics and Astronomy and the College of Arts & Sciences by David Onley Emeritus Professor of Physics and Astronomy Leslie Flemming Dean, College of Arts & Sciences STEINBERG, GARY W. M.S. June 2002. Physics Relative Reality (41pp.) Director of Thesis: David Onley The consequences of Einstein’s Special Theory of Relativity are explored in an imaginary world where the speed of light is only 10 m/s. Emphasis is placed on phenomena experienced by a solitary observer: the aberration of light, the Doppler effect, the alteration of the perceived power of incoming light, and the perception of time. Modified ray-tracing software and other visualization tools are employed to create a video that brings this imaginary world to life. The process of creating the video is detailed, including an annotated copy of the final script. Some of the less explored aspects of relativistic travel—discovered in the process of generating the video—are discussed, such as the perception of going backwards when actually accelerating from rest along the forward direction. Approved: David Onley Emeritus Professor of Physics & Astronomy 5 Table of Contents ABSTRACT........................................................................................................4 -

Relativistic Electrodynamics with Minkowski Spacetime Algebra
Relativistic Electrodynamics with Minkowski Spacetime Algebra Walid Karam Azzubaidi nº 52174 Mestrado Integrado em Eng. Electrotécnica e de Computadores, Instituto Superior Técnico, Av. Rovisco Pais 1, 1049-001 Lisboa, Portugal. e-mail: [email protected] Abstract. The aim of this work is to study several electrodynamic effects using spacetime algebra – the geometric algebra of spacetime, which is supported on Minkowski spacetime. The motivation for submitting onto this investigation relies on the need to explore new formalisms which allow attaining simpler derivations with rational results. The practical applications for the examined themes are uncountable and diverse, such as GPS devices, Doppler ultra-sound, color space conversion, aerospace industry etc. The effects which will be analyzed include time dilation, space contraction, relativistic velocity addition for collinear vectors, Doppler shift, moving media and vacuum form reduction, Lorentz force, energy-momentum operator and finally the twins paradox with Doppler shift. The difference between active and passive Lorentz transformation is also established. The first regards a vector transformation from one frame to another, while the passive transformation is related to user interpretation, therefore considered passive interpretation, since two observers watch the same event with a different point of view. Regarding time dilation and length contraction in the theory of special relativity, one concludes that those parameters (time and length) are relativistic dimensions, since their -

Voigt Transformations in Retrospect: Missed Opportunities?
Voigt transformations in retrospect: missed opportunities? Olga Chashchina Ecole´ Polytechnique, Palaiseau, France∗ Natalya Dudisheva Novosibirsk State University, 630 090, Novosibirsk, Russia† Zurab K. Silagadze Novosibirsk State University and Budker Institute of Nuclear Physics, 630 090, Novosibirsk, Russia.‡ The teaching of modern physics often uses the history of physics as a didactic tool. However, as in this process the history of physics is not something studied but used, there is a danger that the history itself will be distorted in, as Butterfield calls it, a “Whiggish” way, when the present becomes the measure of the past. It is not surprising that reading today a paper written more than a hundred years ago, we can extract much more of it than was actually thought or dreamed by the author himself. We demonstrate this Whiggish approach on the example of Woldemar Voigt’s 1887 paper. From the modern perspective, it may appear that this paper opens a way to both the special relativity and to its anisotropic Finslerian generalization which came into the focus only recently, in relation with the Cohen and Glashow’s very special relativity proposal. With a little imagination, one can connect Voigt’s paper to the notorious Einstein-Poincar´epri- ority dispute, which we believe is a Whiggish late time artifact. We use the related historical circumstances to give a broader view on special relativity, than it is usually anticipated. PACS numbers: 03.30.+p; 1.65.+g Keywords: Special relativity, Very special relativity, Voigt transformations, Einstein-Poincar´epriority dispute I. INTRODUCTION Sometimes Woldemar Voigt, a German physicist, is considered as “Relativity’s forgotten figure” [1]. -

A Semiclassical Kinetic Theory of Dirac Particles and Thomas
A Semiclassical Kinetic Theory of Dirac Particles and Thomas Precession Omer¨ F. DAYI and Eda KILINC¸ARSLAN Physics Engineering Department, Faculty of Science and Letters, Istanbul Technical University, TR-34469, Maslak–Istanbul, Turkey1 Kinetic theory of Dirac fermions is studied within the matrix valued differential forms method. It is based on the symplectic form derived by employing the semiclassical wave packet build of the positive energy solutions of the Dirac equation. A satisfactory definition of the distribution matrix elements imposes to work in the basis where the helicity is diagonal which is also needed to attain the massless limit. We show that the kinematic Thomas precession correction can be studied straightforwardly within this approach. It contributes on an equal footing with the Berry gauge fields. In fact in equations of motion it eliminates the terms arising from the Berry gauge fields. 1 Introduction Dirac equation which describes massive spin-1/2 particles possesses either positive or negative energy solutions described by 4-dimensional spinors. However, to furnish a well defined one particle inter- pretation, instead of employing both type of solutions, a wave packet build of only positive energy plane wave solutions should be preferred. A nonrelativistic semiclassical dynamics can be obtained employing this wave packet. Semiclassical limit may be useful to have a better understanding of some quantum mechanical phenomena. In the massless limit Dirac equation leads to two copies of Weyl arXiv:1508.00781v1 [hep-th] 4 Aug 2015 particles which possess opposite chirality. Recently, the chiral semiclassical kinetic theory has been formulated to embrace the anomalies due to the external electromagnetic fields in 3 + 1 dimensions [1, 2]. -

Physical Holonomy, Thomas Precession, and Clifford Algebra
hXWWM UWThPh 1988-39 Physical Holonomy, Thomas Precession, and Clifford Algebra H. Urbantke Institut für Theoretische Physik Universität Wien Abstract After a general discussion of the physical significance of holonomy group transfor mations, a relation between the transports of Fermi-Walker and Levi-Civitä in Special Relativity is pointed out. A well-known example - the Thomas-Wigner angle - is red- erived in a completely frame-independent manner using Clifford algebra. 1 Introduction — Holonomy Groups in Physics Quantum Holonomy has become a rather popular concept in recent /ears, in particular through the work [1] of Berry and Simon; but it is clear that the Aharanov-Bohm effect [2] is a much earlier instance of it. The point is that here the differential geometric idea of parallel transport defined by connections in fibre bundles [3] attains rather direct physical meaning susceptible to experimentation. This is remarkable because parallel transport has been around in differential geometry since 1917, and differential geometry has invaded theoretical physics since the early days of General Relativity, with new impulses coming from Hamiltonian dynamics and gauge theory: yet the significance of connections used to be formal, the 'transformation properties' standing in the forefront, as one can see from the old 'Ricci-Calculus' as used by Einstein and Grossmann [4] or from the way non- abelian gauge fields were introduced by Yang and Mills [5]. The rather indirect 'physical' realization of parallel transport in General Relativity by Schild's 'ladder construction' [6] also stresses this fact; in non-abelian gauge theory I am aware of no physical realization at all. -
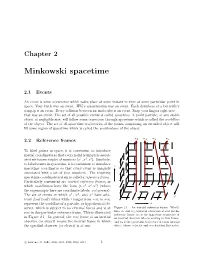
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Physics 209 Fall 2002 Notes 5 Thomas Precession Jackson's
Physics 209 Fall 2002 Notes 5 Thomas Precession Jackson's discussion of Thomas precession is based on Thomas's original treatment, and on the later paper by Bargmann, Michel, and Telegdi. The alternative treatment presented in these notes is more geometrical in spirit and makes greater effort to identify the aspects of the problem that are dependent on the state of the observer and those that are Lorentz and gauge invariant. There is one part of the problem that involves some algebra (the calculation of Thomas's angular velocity), and this is precisely the part that is dependent on the state of the observer (the calculation is specific to a particular Lorentz frame). The rest of the theory is actually quite simple. In the following we will choose units so that c = 1, except that the c's will be restored in some final formulas. xµ(τ) u e1 e2 e3 u `0 e3 e1 `1 e2 `2 `3 µ Fig. 5.1. Lab frame f`αg and conventional rest frames feαg along the world line x (τ) of a particle. The time-like basis vector e0 of the conventional rest frame is the same as the world velocity u of the particle. The spatial axes of the conventional rest frame fei; i = 1; 2; 3g span the three-dimensional space-like hyperplane orthogonal to the world line. To begin we must be careful of the phrase \the rest frame of the particle," which is used frequently in relativity theory and in the theory of Thomas precession. The geometrical situation is indicated schematically in Fig. -

Gravito-Magnetism in One-Body and Two-Body Systems: Theory and Experiments
Gravito-Magnetism in one-body and two-body systems: Theory and Experiments. R. F. O’Connell Department of Physics and Astronomy, Louisiana State University, Baton Rouge, Louisiana 70803-4001, USA Summary. — We survey theoretical and experimental/observational results on general-relativistic spin (rotation) effects in binary systems. A detailed discussion is given of the two-body Kepler problem and its first post-Newtonian generalization, including spin effects. Spin effects result from gravitational spin-orbit and spin-spin interactions (analogous to the corresponding case in quantum electrodynamics) and these effects are shown to manifest themselves in two ways: (a) precession of the spin- ning bodies per se and (b) precession of the orbit (which is further broke down into precessions of the argument of the periastron, the longitude of the ascending node and the inclination of the orbit). We also note the ambiguity that arises from use of the terminology frame-dragging, de Sitter precession and Lense-Thirring precession, in contrast to the unambiguous reference to spin-orbit and spin-spin precessions. Turning to one-body experiments, we discuss the recent results of the GP-B experi- ment, the Ciufolini-Pavlis Lageos experiment and lunar-laser ranging measurements (which actually involve three bodies). Two-body systems inevitably involve astro- nomical observations and we survey results obtained from the first binary pulsar system, a more recently discovered binary system and, finally, the highly significant discovery of a double-pulsar binary system. c Societ`a Italiana di Fisica 1 2 R. F. O’Connell 1. – Introduction This manuscript is, in essence, a progress report on general-relativistic spin effects in binary systems, which I lectured on in Varenna summer schools in 1974 [1] and 1975 [2].