Physics 523, General Relativity
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Quaternions and Cli Ord Geometric Algebras
Quaternions and Cliord Geometric Algebras Robert Benjamin Easter First Draft Edition (v1) (c) copyright 2015, Robert Benjamin Easter, all rights reserved. Preface As a rst rough draft that has been put together very quickly, this book is likely to contain errata and disorganization. The references list and inline citations are very incompete, so the reader should search around for more references. I do not claim to be the inventor of any of the mathematics found here. However, some parts of this book may be considered new in some sense and were in small parts my own original research. Much of the contents was originally written by me as contributions to a web encyclopedia project just for fun, but for various reasons was inappropriate in an encyclopedic volume. I did not originally intend to write this book. This is not a dissertation, nor did its development receive any funding or proper peer review. I oer this free book to the public, such as it is, in the hope it could be helpful to an interested reader. June 19, 2015 - Robert B. Easter. (v1) [email protected] 3 Table of contents Preface . 3 List of gures . 9 1 Quaternion Algebra . 11 1.1 The Quaternion Formula . 11 1.2 The Scalar and Vector Parts . 15 1.3 The Quaternion Product . 16 1.4 The Dot Product . 16 1.5 The Cross Product . 17 1.6 Conjugates . 18 1.7 Tensor or Magnitude . 20 1.8 Versors . 20 1.9 Biradials . 22 1.10 Quaternion Identities . 23 1.11 The Biradial b/a . -

Physics 325: General Relativity Spring 2019 Problem Set 2
Physics 325: General Relativity Spring 2019 Problem Set 2 Due: Fri 8 Feb 2019. Reading: Please skim Chapter 3 in Hartle. Much of this should be review, but probably not all of it|be sure to read Box 3.2 on Mach's principle. Then start on Chapter 6. Problems: 1. Spacetime interval. Hartle Problem 4.13. 2. Four-vectors. Hartle Problem 5.1. 3. Lorentz transformations and hyperbolic geometry. In class, we saw that a Lorentz α0 α β transformation in 2D can be written as a = L β(#)a , that is, 0 ! ! ! a0 cosh # − sinh # a0 = ; (1) a10 − sinh # cosh # a1 where a is spacetime vector. Here, the rapidity # is given by tanh # = β; cosh # = γ; sinh # = γβ; (2) where v = βc is the velocity of frame S0 relative to frame S. (a) Show that two successive Lorentz boosts of rapidity #1 and #2 are equivalent to a single α γ α Lorentz boost of rapidity #1 +#2. In other words, check that L γ(#1)L(#2) β = L β(#1 +#2), α where L β(#) is the matrix in Eq. (1). You will need the following hyperbolic trigonometry identities: cosh(#1 + #2) = cosh #1 cosh #2 + sinh #1 sinh #2; (3) sinh(#1 + #2) = sinh #1 cosh #2 + cosh #1 sinh #2: (b) From Eq. (3), deduce the formula for tanh(#1 + #2) in terms of tanh #1 and tanh #2. For the appropriate choice of #1 and #2, use this formula to derive the special relativistic velocity tranformation rule V − v V 0 = : (4) 1 − vV=c2 Physics 325, Spring 2019: Problem Set 2 p. -

Codimension One Isometric Immersions Betweenlorentz Spaces by L
TRANSACTIONS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 252, August 1979 CODIMENSION ONE ISOMETRIC IMMERSIONS BETWEENLORENTZ SPACES BY L. K. GRAVES In memory of my father, Lucius Kingman Graves Abstract. The theorem of Hartman and Nirenberg classifies codimension one isometric immersions between Euclidean spaces as cylinders over plane curves. Corresponding results are given here for Lorentz spaces, which are Euclidean spaces with one negative-definite direction (also known as Minkowski spaces). The pivotal result involves the completeness of the relative nullity foliation of such an immersion. When this foliation carries a nondegenerate metric, results analogous to the Hartman-Nirenberg theorem obtain. Otherwise, a new description, based on particular surfaces in the three-dimensional Lorentz space, is required. The theorem of Hartman and Nirenberg [HN] says that, up to a proper motion of E"+', all isometric immersions of E" into E"+ ' have the form id X c: E"-1 xEUr'x E2 (0.1) where c: E1 ->E2 is a unit speed plane curve and the factors in the product are orthogonal. A proof of the Hartman-Nirenberg result also appears in [N,]. The major step in proving the theorem is showing that the relative nullity foliation, which is spanned by those tangent directions in which a local unit normal field is parallel, has complete leaves. These leaves yield the E"_1 factors in (0.1). The one-dimensional complement of the relative nullity foliation gives rise to the curve c. This paper studies isometric immersions of L" into Ln+1, where L" denotes the «-dimensional Lorentz (or Minkowski) space. Its chief goal is the classifi- cation, up to a proper motion of L"+1, of all such immersions. -

Embeddings of Integral Quadratic Forms Rick Miranda Colorado State
Embeddings of Integral Quadratic Forms Rick Miranda Colorado State University David R. Morrison University of California, Santa Barbara Copyright c 2009, Rick Miranda and David R. Morrison Preface The authors ran a seminar on Integral Quadratic Forms at the Institute for Advanced Study in the Spring of 1982, and worked on a book-length manuscript reporting on the topic throughout the 1980’s and early 1990’s. Some new results which are proved in the manuscript were announced in two brief papers in the Proceedings of the Japan Academy of Sciences in 1985 and 1986. We are making this preliminary version of the manuscript available at this time in the hope that it will be useful. Still to do before the manuscript is in final form: final editing of some portions, completion of the bibliography, and the addition of a chapter on the application to K3 surfaces. Rick Miranda David R. Morrison Fort Collins and Santa Barbara November, 2009 iii Contents Preface iii Chapter I. Quadratic Forms and Orthogonal Groups 1 1. Symmetric Bilinear Forms 1 2. Quadratic Forms 2 3. Quadratic Modules 4 4. Torsion Forms over Integral Domains 7 5. Orthogonality and Splitting 9 6. Homomorphisms 11 7. Examples 13 8. Change of Rings 22 9. Isometries 25 10. The Spinor Norm 29 11. Sign Structures and Orientations 31 Chapter II. Quadratic Forms over Integral Domains 35 1. Torsion Modules over a Principal Ideal Domain 35 2. The Functors ρk 37 3. The Discriminant of a Torsion Bilinear Form 40 4. The Discriminant of a Torsion Quadratic Form 45 5. -

RELATIVE REALITY a Thesis
RELATIVE REALITY _______________ A thesis presented to the faculty of the College of Arts & Sciences of Ohio University _______________ In partial fulfillment of the requirements for the degree Master of Science ________________ Gary W. Steinberg June 2002 © 2002 Gary W. Steinberg All Rights Reserved This thesis entitled RELATIVE REALITY BY GARY W. STEINBERG has been approved for the Department of Physics and Astronomy and the College of Arts & Sciences by David Onley Emeritus Professor of Physics and Astronomy Leslie Flemming Dean, College of Arts & Sciences STEINBERG, GARY W. M.S. June 2002. Physics Relative Reality (41pp.) Director of Thesis: David Onley The consequences of Einstein’s Special Theory of Relativity are explored in an imaginary world where the speed of light is only 10 m/s. Emphasis is placed on phenomena experienced by a solitary observer: the aberration of light, the Doppler effect, the alteration of the perceived power of incoming light, and the perception of time. Modified ray-tracing software and other visualization tools are employed to create a video that brings this imaginary world to life. The process of creating the video is detailed, including an annotated copy of the final script. Some of the less explored aspects of relativistic travel—discovered in the process of generating the video—are discussed, such as the perception of going backwards when actually accelerating from rest along the forward direction. Approved: David Onley Emeritus Professor of Physics & Astronomy 5 Table of Contents ABSTRACT........................................................................................................4 -

Relativistic Electrodynamics with Minkowski Spacetime Algebra
Relativistic Electrodynamics with Minkowski Spacetime Algebra Walid Karam Azzubaidi nº 52174 Mestrado Integrado em Eng. Electrotécnica e de Computadores, Instituto Superior Técnico, Av. Rovisco Pais 1, 1049-001 Lisboa, Portugal. e-mail: [email protected] Abstract. The aim of this work is to study several electrodynamic effects using spacetime algebra – the geometric algebra of spacetime, which is supported on Minkowski spacetime. The motivation for submitting onto this investigation relies on the need to explore new formalisms which allow attaining simpler derivations with rational results. The practical applications for the examined themes are uncountable and diverse, such as GPS devices, Doppler ultra-sound, color space conversion, aerospace industry etc. The effects which will be analyzed include time dilation, space contraction, relativistic velocity addition for collinear vectors, Doppler shift, moving media and vacuum form reduction, Lorentz force, energy-momentum operator and finally the twins paradox with Doppler shift. The difference between active and passive Lorentz transformation is also established. The first regards a vector transformation from one frame to another, while the passive transformation is related to user interpretation, therefore considered passive interpretation, since two observers watch the same event with a different point of view. Regarding time dilation and length contraction in the theory of special relativity, one concludes that those parameters (time and length) are relativistic dimensions, since their -

Voigt Transformations in Retrospect: Missed Opportunities?
Voigt transformations in retrospect: missed opportunities? Olga Chashchina Ecole´ Polytechnique, Palaiseau, France∗ Natalya Dudisheva Novosibirsk State University, 630 090, Novosibirsk, Russia† Zurab K. Silagadze Novosibirsk State University and Budker Institute of Nuclear Physics, 630 090, Novosibirsk, Russia.‡ The teaching of modern physics often uses the history of physics as a didactic tool. However, as in this process the history of physics is not something studied but used, there is a danger that the history itself will be distorted in, as Butterfield calls it, a “Whiggish” way, when the present becomes the measure of the past. It is not surprising that reading today a paper written more than a hundred years ago, we can extract much more of it than was actually thought or dreamed by the author himself. We demonstrate this Whiggish approach on the example of Woldemar Voigt’s 1887 paper. From the modern perspective, it may appear that this paper opens a way to both the special relativity and to its anisotropic Finslerian generalization which came into the focus only recently, in relation with the Cohen and Glashow’s very special relativity proposal. With a little imagination, one can connect Voigt’s paper to the notorious Einstein-Poincar´epri- ority dispute, which we believe is a Whiggish late time artifact. We use the related historical circumstances to give a broader view on special relativity, than it is usually anticipated. PACS numbers: 03.30.+p; 1.65.+g Keywords: Special relativity, Very special relativity, Voigt transformations, Einstein-Poincar´epriority dispute I. INTRODUCTION Sometimes Woldemar Voigt, a German physicist, is considered as “Relativity’s forgotten figure” [1]. -
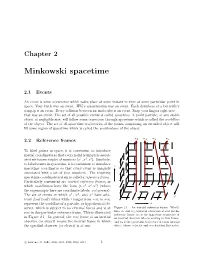
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Introduction to Clifford's Geometric Algebra
SICE Journal of Control, Measurement, and System Integration, Vol. 4, No. 1, pp. 001–011, January 2011 Introduction to Clifford’s Geometric Algebra ∗ Eckhard HITZER Abstract : Geometric algebra was initiated by W.K. Clifford over 130 years ago. It unifies all branchesof physics, and has found rich applications in robotics, signal processing, ray tracing, virtual reality, computer vision, vector field processing, tracking, geographic information systems and neural computing. This tutorial explains the basics of geometric algebra, with concrete examples of the plane, of 3D space, of spacetime, and the popular conformal model. Geometric algebras are ideal to represent geometric transformations in the general framework of Clifford groups (also called versor or Lipschitz groups). Geometric (algebra based) calculus allows, e.g., to optimize learning algorithms of Clifford neurons, etc. Key Words: Hypercomplex algebra, hypercomplex analysis, geometry, science, engineering. 1. Introduction unique associative and multilinear algebra with this property. W.K. Clifford (1845-1879), a young English Goldsmid pro- Thus if we wish to generalize methods from algebra, analysis, ff fessor of applied mathematics at the University College of Lon- calculus, di erential geometry (etc.) of real numbers, complex don, published in 1878 in the American Journal of Mathemat- numbers, and quaternion algebra to vector spaces and multivec- ics Pure and Applied a nine page long paper on Applications of tor spaces (which include additional elements representing 2D Grassmann’s Extensive Algebra. In this paper, the young ge- up to nD subspaces, i.e. plane elements up to hypervolume el- ff nius Clifford, standing on the shoulders of two giants of alge- ements), the study of Cli ord algebras becomes unavoidable. -

The “Fine Structure” of Special Relativity and the Thomas Precession
Annales de la Fondation Louis de Broglie, Volume 29 no 1-2, 2004 57 The “fine structure” of Special Relativity and the Thomas precession Yves Pierseaux Inter-university Institute for High Energy Universit´e Libre de Bruxelles (ULB) e-mail: [email protected] RESUM´ E.´ La relativit´e restreinte (RR) standard est essentiellement un mixte entre la cin´ematique d’Einstein et la th´eorie des groupes de Poincar´e. Le sous-groupe des transformations unimodulaires (boosts scalaires) implique que l’invariant fondamental de Poincar´e n’est pas le quadri-intervalle mais le quadri-volume. Ce dernier d´efinit non seulement des unit´es de mesure, compatibles avec l’invariance de la vitesse de la lumi`ere, mais aussi une diff´erentielle scalaire exacte.Le quadri-intervalle d’Einstein-Minkowski n´ecessite une d´efinition non- euclidienne de la distance spatio-temporelle et l’introduction d’une diff´erentielle non-exacte,l’´el´ement de temps propre. Les boost scalaires de Poincar´e forment un sous-groupe du groupe g´en´eral (avec deux rotations spatiales). Ce n’est pas le cas des boosts vectoriels d’Einstein ´etroitement li´es `alad´efinition du temps pro- pre et du syst`eme propre. Les deux rotations spatiales de Poincar´e n’apportent pas de physique nouvelle alors que la pr´ecession spatiale introduite par Thomas en 1926 pour une succession de boosts non- 1 parall`eles corrige (facteur 2 ) la valeur calcul´ee classiquement du mo- ment magn´etique propre de l’´electron. Si la relativit´e de Poincar´e est achev´ee en 1908, c’est Thomas qui apporte en 1926 la touche finale `a la cin´ematique d’Einstein-Minkowski avec une d´efinition correcte et compl`ete (transport parall`ele) du syst`eme propre. -

Zeros of Conformal Fields in Any Metric Signature
Zeros of conformal fields in any metric signature Andrzej Derdzinski Department of Mathematics, The Ohio State University, Columbus, OH 43210, USA E-mail: [email protected] Abstract. The connected components of the zero set of any conformal vector field, in a pseudo-Riemannian manifold of arbitrary signature, are shown to be totally umbilical conifold varieties, that is, smooth submanifolds except possibly for some quadric singularities. The singularities occur only when the metric is indefinite, including the Lorentzian case. This generalizes an analogous result for Riemannian manifolds, due to Belgun, Moroianu and Ornea (2010). AMS classification scheme numbers: 53B30 1. Introduction A vector field v on a pseudo-Riemannian manifold (M; g) of dimension n ≥ 2 is called conformal if, for some function φ : M ! IR, $vg = φg; that is; in coordinates; vj;k + vk;j = φgjk : (1) One then obviously has div v = nφ/2. The class of conformal vector fields on (M; g) includes Killing fields v, characterized by (1) with φ = 0. Kobayashi [15] showed that, for any Killing vector field v on a Riemannian manifold (M; g), the connected components of the zero set of v are mutually isolated totally geodesic submanifolds of even codimensions. Assuming compactness of M, Blair [5] established an analogue of Kobayashi's theorem for conformal vector fields, in which the word `geodesic' is replaced by `umbilical' and the codimension clause is relaxed for one-point connected components. Very recently, Belgun, Moroianu and Ornea [4] proved that Blair's conclusion is valid in the noncompact case as well. The last result is also a direct consequence of a theorem of Frances [12] stating that a conformal field on a Riemannian manifold is linearizable at any zero z unless some neighborhood of z is conformally flat. -

7. Special Relativity
7. Special Relativity Although Newtonian mechanics gives an excellent description of Nature, it is not uni- versally valid. When we reach extreme conditions — the very small, the very heavy or the very fast — the Newtonian Universe that we’re used to needs replacing. You could say that Newtonian mechanics encapsulates our common sense view of the world. One of the major themes of twentieth century physics is that when you look away from our everyday world, common sense is not much use. One such extreme is when particles travel very fast. The theory that replaces New- tonian mechanics is due to Einstein. It is called special relativity.Thee↵ectsofspecial relativity become apparent only when the speeds of particles become comparable to the speed of light in the vacuum. The speed of light is 1 c =299792458ms− This value of c is exact. It may seem strange that the speed of light is an integer when measured in meters per second. The reason is simply that this is taken to be the definition of what we mean by a meter: it is the distance travelled by light in 1/299792458 seconds. For the purposes of this course, we’ll be quite happy with the 8 1 approximation c 3 10 ms− . ⇡ ⇥ The first thing to say is that the speed of light is fast. Really fast. The speed of 1 4 1 sound is around 300 ms− ;escapevelocityfromtheEarthisaround10 ms− ;the 5 1 orbital speed of our solar system in the Milky Way galaxy is around 10 ms− . As we shall soon see, nothing travels faster than c.