Surveyor Ill Mission Report Part I
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Mapping the Surveyor III Crater Large-Scale Maps May Be Produced from Lunar Oribiter Photographs
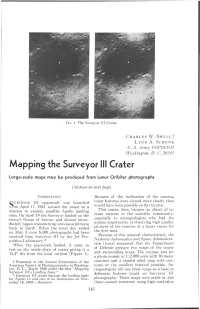
FIG. 1. The Surveyor I II Crater. CHARLES W. SHULL t LYNN A. SCHENK U. S. Army TOPOCOM Washington, D. C.20315 Mapping the Surveyor III Crater large-scale maps may be produced from lunar Oribiter photographs (Abstract on next page) INRODUCTlON Because of the inclination of the camera, lunar features were viewed more clearly than URVEYOR III spacecraft was launched Son April 17, 1967 toward the moon on a would have been possible on flat terrain. mission to explore possible Apollo landing This crater, then, became an object of in sites. On April 19 the Surveyor landed on the tense interest to the scientific community, moon's Ocean of Storms and almost imme especially to astrogeologists who had the diately began transmitting television pictures unique opportunity of observing high quality back to Earth. When the lunar day ended pictures of the interior of a lunar crater for on May 3, over 6,300 photographs had been the first time. Because of this unusual characteristic, the received from Surveyor III by the Jet Pro pulsion Laboratory.* ational Aeronautics and Space Administra vVhen the spacecraft landed, it came to tion (NASA) requested that the Department of Defense prepare two maps of the crater rest on the inside slope of crater giving it a 12.40 tilt from the local vertical (Figure 1). and surrounding areas. The request was for a photo mosaic at 1 :2,000 scale with 10-meter t Presented at the Annual Convention of the contours and a shaded relief map with con American Society of Photogrammetry in Washing tours at the smallest interval possible. -

The Moon After Apollo
ICARUS 25, 495-537 (1975) The Moon after Apollo PAROUK EL-BAZ National Air and Space Museum, Smithsonian Institution, Washington, D.G- 20560 Received September 17, 1974 The Apollo missions have gradually increased our knowledge of the Moon's chemistry, age, and mode of formation of its surface features and materials. Apollo 11 and 12 landings proved that mare materials are volcanic rocks that were derived from deep-seated basaltic melts about 3.7 and 3.2 billion years ago, respec- tively. Later missions provided additional information on lunar mare basalts as well as the older, anorthositic, highland rocks. Data on the chemical make-up of returned samples were extended to larger areas of the Moon by orbiting geo- chemical experiments. These have also mapped inhomogeneities in lunar surface chemistry, including radioactive anomalies on both the near and far sides. Lunar samples and photographs indicate that the moon is a well-preserved museum of ancient impact scars. The crust of the Moon, which was formed about 4.6 billion years ago, was subjected to intensive metamorphism by large impacts. Although bombardment continues to the present day, the rate and size of impact- ing bodies were much greater in the first 0.7 billion years of the Moon's history. The last of the large, circular, multiringed basins occurred about 3.9 billion years ago. These basins, many of which show positive gravity anomalies (mascons), were flooded by volcanic basalts during a period of at least 600 million years. In addition to filling the circular basins, more so on the near side than on the far side, the basalts also covered lowlands and circum-basin troughs. -

Gao-21-306, Nasa
United States Government Accountability Office Report to Congressional Committees May 2021 NASA Assessments of Major Projects GAO-21-306 May 2021 NASA Assessments of Major Projects Highlights of GAO-21-306, a report to congressional committees Why GAO Did This Study What GAO Found This report provides a snapshot of how The National Aeronautics and Space Administration’s (NASA) portfolio of major well NASA is planning and executing projects in the development stage of the acquisition process continues to its major projects, which are those with experience cost increases and schedule delays. This marks the fifth year in a row costs of over $250 million. NASA plans that cumulative cost and schedule performance deteriorated (see figure). The to invest at least $69 billion in its major cumulative cost growth is currently $9.6 billion, driven by nine projects; however, projects to continue exploring Earth $7.1 billion of this cost growth stems from two projects—the James Webb Space and the solar system. Telescope and the Space Launch System. These two projects account for about Congressional conferees included a half of the cumulative schedule delays. The portfolio also continues to grow, with provision for GAO to prepare status more projects expected to reach development in the next year. reports on selected large-scale NASA programs, projects, and activities. This Cumulative Cost and Schedule Performance for NASA’s Major Projects in Development is GAO’s 13th annual assessment. This report assesses (1) the cost and schedule performance of NASA’s major projects, including the effects of COVID-19; and (2) the development and maturity of technologies and progress in achieving design stability. -
Surveyor 1 Space- Craft on June 2, 1966 As Seen by the Narrow Angle Camera of the Lunar Re- Connaissance Orbiter Taken on July 17, 2009 (Also See Fig
i “Project Surveyor, in particular, removed any doubt that it was possible for Americans to land on the Moon and explore its surface.” — Harrison H. Schmitt, Apollo 17 Scientist-Astronaut ii Frontispiece: Landing site of the Surveyor 1 space- craft on June 2, 1966 as seen by the narrow angle camera of the Lunar Re- connaissance Orbiter taken on July 17, 2009 (also see Fig. 13). The white square in the upper photo outlines the area of the enlarged view below. The spacecraft is ca. 3.3 m tall and is casting a 15 m shadow to the East. (NASA/LROC/ ASU/GSFC photos) iii iv Surveyor I: America’s First Moon Landing by William F. Mellberg v © 2014, 2015 William F. Mellberg vi About the author: William Mellberg was a marketing and public relations representative with Fokker Aircraft. He is also an aerospace historian, having published many articles on both the development of airplanes and space vehicles in various magazines. He is the author of Famous Airliners and Moon Missions. He also serves as co-Editor of Harrison H. Schmitt’s website: http://americasuncommonsense.com Acknowledgments: The support and recollections of Frank Mellberg, Harrison Schmitt, Justin Rennilson, Alexander Gurshstein, Paul Spudis, Ronald Wells, Colin Mackellar and Dwight Steven- Boniecki is gratefully acknowledged. vii Surveyor I: America’s First Moon Landing by William F. Mellberg A Journey of 250,000 Miles . December 14, 2013. China’s Chang’e 3 spacecraft successfully touched down on the Moon at 1311 GMT (2111 Beijing Time). The landing site was in Mare Imbrium, the Sea of Rains, about 25 miles (40 km) south of the small crater, Laplace F, and roughly 100 miles (160 km) east of its original target in Sinus Iridum, the Bay of Rainbows. -

Open Research Online Oro.Open.Ac.Uk
Open Research Online The Open University’s repository of research publications and other research outputs Analysis of Lunar Boulder Tracks: Implications for Trafficability of Pyroclastic Deposits Journal Item How to cite: Bickel, V. T.; Honniball, C. I.; Martinez, S. N.; Rogaski, A.; Sargeant, Hannah; Bell, S. K.; Czaplinski, E. C.; Farrant, B. E.; Harrington, E. M.; Tolometti, G. D. and Kring, D. A. (2019). Analysis of Lunar Boulder Tracks: Implications for Trafficability of Pyroclastic Deposits. Journal of Geophysical Research: Planets, 124(5) pp. 1296–1314. For guidance on citations see FAQs. c 2019 American Geophysical Union https://creativecommons.org/licenses/by-nc-nd/4.0/ Version: Version of Record Link(s) to article on publisher’s website: http://dx.doi.org/doi:10.1029/2018JE005876 Copyright and Moral Rights for the articles on this site are retained by the individual authors and/or other copyright owners. For more information on Open Research Online’s data policy on reuse of materials please consult the policies page. oro.open.ac.uk RESEARCH ARTICLE Analysis of Lunar Boulder Tracks: Implications 10.1029/2018JE005876 for Trafficability of Pyroclastic Deposits Key Points: V. T. Bickel1,2 , C. I. Honniball3, S. N. Martinez4, A. Rogaski5, H. M. Sargeant6, S. K. Bell7, • Bearing capacity of pyroclastic, 8 7 9 9 10,11 mare, and highland regions is E. C. Czaplinski , B. E. Farrant , E. M. Harrington , G. D. Tolometti , and D. A. Kring calculated based on measurements 1 2 of boulder tracks in orbital images Department Planets & Comets, Max -

Shoot the Moon – 1967
Video Transcript for Archival Research Catalog (ARC) Identifier 45011 Assignment: Shoot the Moon – 1967 Narrator: The assignment was specific: get photographs of the surface of the Moon that are good enough to determine whether or not it’s safe for a man to land there. But appearances can be deceiving, just as deceiving as trying to get a good picture of, well, a candy apple. Doesn’t seem to be too much of a problem, just set it up, light it, and snap the picture. Easy, quick, simple. But it can be tough. To begin with, the apple is some distance away, so you can’t get to it to just set it up, light it, and so on. To make things even more difficult, it isn’t even holding still; it’s moving around in circles. Now timing is important. You have to take your picture when the apple is nearest to you so you get the most detail and when the light that’s available is at the best angle for the photo. And even that’s not all. You are moving too, in circles. You’re both turning and circling about the apple. Now, about that assignment. As the technology of man in space was developing, it became more and more apparent that our knowledge of the Moon’s surface as a possible landing site was not sufficient. To land man safely on the Moon and get him safely off again, we had to know whether we could set up a precise enough trajectory to reach the Moon. -

Apollo 15 Mission
THE APOLLO 15 MISSION On July 30, 1971, the Apollo 15 lunar module Falcon, descending over the 4,000 meter Apennine Mountain front, landed at one of the most geologically diverse sites selected in the Apollo program, the Hadley-Apennine region. Astronauts Dave Scott and Jim Irwin brought the spacecraft onto a mare plain just inside the most prominent mountain ring structure of the Imbrium basin, the Montes Apennines chain which marks its southeastern topographic rim, and close to the sinuous Hadley Rille (Fig. 1). The main objectives of the mission were to investigate and sample materials of the Apennine Front itself (expected to be Imbrium ejecta and pre-Imbrium materials), of Hadley Rille, and of the mare lavas of Palus Putredinis (Fig. 2). A package of seven surface experiments, including heat flow and passive seismic, was also set up and 1152 surface photographs were taken. A television camera, data acquisition (sequence) camera, and orbital photography and chemical data provided more information. The Apollo 15 mission was the first devoted almost entirely to science, and the first to use a Rover vehicle which considerably extended the length of the traverses, from a total of 3.5 km on Apollo 14 to 25.3 km during three separate traverses on Apollo 15 (Fig. 3). The collected sample mass was almost doubled, from 43 kg on Apollo 14 to 78 kg on Apollo 15. A reduction in the planned traverse length was made necessary, in part by unexpected and time-consuming difficulties in the collection of the deep core sample (at the experiments package area). -
Mission Task Checklist
MISSION TASK CHECKLIST Entryway Discovery (page 2) Astronaut Encounter (page 3) Astronaut Autograph (page 3) Where in the World? (page 4) Mission Patch (page 5) Wild Neighbors (page 6) NASA Speak (page 7) Journey To Mars: Explorers Wanted (page 7) The Orion spacecraft is the Science On A Sphere (page 8) crew vehicle NASA is Move the Galaxy (page 8) currently developing for future deep-space missions. Mapping Survey (page 9) Crew Conference (page 10) Shuttle Launch Experience (page 15) EXPEDITION Bus Tour (page16) Touch the Moon (page16) LOGBOOK Energy for the Future (page 11-12) From Sketchpad to Launchpad (page 13) Team Name: ______________________________ ISS Live! (page 14) Rocket Garden Rap (page 17) Commander (teacher): ______________________ Rocket Search (page 18) Pilot (chaperone): __________________________ Mission Specialist 1 (MS1): ________________________ For more cool information and activities, visit www.nasa.gov and click on the “For Students” tab! Mission Specialist 2 (MS2): ________________________ Mission Specialist 3 (MS3): ________________________ Mission Specialist 4 (MS4): ________________________ MISSION TASK: Rocket Search LOCATION: Rocket Garden Expedition 321 YOU ARE GO FOR LAUNCH The rockets on display here are real, space worthy rockets left over from the early days of space exploration. Unlike the space shuttle, they are all “expendable” rockets, which means they were designed to be used only once. Some of these were Welcome the Kennedy Space Center Visitor Complex, the only place surplus, while others were designed for missions that were later canceled. on Earth where human beings have left the planet, traveled to Find the following items in the Rocket Garden and in the Word Search puzzle. -

Rine and the Apennine Mountains. INSTITUTION National Aeronautics and Space Administration, Washington, D.C
DOCUMENT RESUME ED 053 930 SE 012 016 AUTHOR Simmons, Gene TITLE On the Moon with Apollo 15,A Guidebook to Hadley Rine and the Apennine Mountains. INSTITUTION National Aeronautics and Space Administration, Washington, D.C. PUB DATE Jun 71 NOTE 52p. AVAILABLE FROM Superintendent of Documents, U.S. Government Printing Office, Washington, D.C. 20402 (3300-0384 $0.50) EDRS PRICE EDRS Price MF-$0.65 HC-$3.29 DESCRIPTORS *Aerospace Technology, Geology, Reading Materials, Resource Materials IDENTIFIERS *Lunar Studies, Moon ABSTRACT The booklet, published before the Apollo 15 mission, gives a timeline for the mission; describes and illustrates the physiography of the landing site; and describes and illustrates each lunar surface scientific experiment. Separate timelines are included for all traverses (the traverses are the Moon walks and, for Apollo 15, the Moon rides in the Rover) with descriptions of activities at each traverse stop. Each member of the crew and the backup crew is identified. Also included is a bibliography of lunar literature and glossary of terms used in lunar studies. Photographs and diagrams are utilized throughout. Content is descriptive and informative but with a minimum of technical detail. (Author/PR) , ON THE MOON WITH APOLLO 15 A Guidebook to Hadley Rille and the Apennine Mountains U.S. DEPARTMENT OFHEALTH, EDUCATION,& WELFARE OFFICE OF EDUCATION THIS DOCUMENT HAS SEENREPRO- DUCED EXACTLY AS RECEIVEDFROM THE PERSON OR ORGANIZATIONORIG INATING IT. POINTS OF VIEWOR OPIN IONS STATED DO NOTNECESSARILY REPRESENT OFFICIAL OFFICEOF EDU CATION POSITION OR POLICY isr) 1..r1 w fl R CO iiii0OP" O NATIONAL AERONAUTICS AND SPACE ADMINISTRATION June 1971 1 \n ON THE MOON WITH APOLLO 15 A uidebook to Hadley Rille and the Apennine Mountains by Gene Simmons Chief Scientist Manned Spacecraft Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION June 1971 2 For sale by the Superintendent of Documents, U.S. -
NASA Symbols and Flags in the US Manned Space Program
SEPTEMBER-DECEMBER 2007 #230 THE FLAG BULLETIN THE INTERNATIONAL JOURNAL OF VEXILLOLOGY www.flagresearchcenter.com 225 [email protected] THE FLAG BULLETIN THE INTERNATIONAL JOURNAL OF VEXILLOLOGY September-December 2007 No. 230 Volume XLVI, Nos. 5-6 FLAGS IN SPACE: NASA SYMBOLS AND FLAGS IN THE U.S. MANNED SPACE PROGRAM Anne M. Platoff 143-221 COVER PICTURES 222 INDEX 223-224 The Flag Bulletin is officially recognized by the International Federation of Vexillological Associations for the publication of scholarly articles relating to vexillology Art layout for this issue by Terri Malgieri Funding for addition of color pages and binding of this combined issue was provided by the University of California, Santa Barbara Library and by the University of California Research Grants for Librarians Program. The Flag Bulletin at the time of publication was behind schedule and therefore the references in the article to dates after December 2007 reflect events that occurred after that date but before the publication of this issue in 2010. © Copyright 2007 by the Flag Research Center; all rights reserved. Postmaster: Send address changes to THE FLAG BULLETIN, 3 Edgehill Rd., Winchester, Mass. 01890 U.S.A. THE FLAG BULLETIN (ISSN 0015-3370) is published bimonthly; the annual subscription rate is $68.00. Periodicals postage paid at Winchester. www.flagresearchcenter.com www.flagresearchcenter.com 141 [email protected] ANNE M. PLATOFF (Annie) is a librarian at the University of Cali- fornia, Santa Barbara Library. From 1989-1996 she was a contrac- tor employee at NASA’s Johnson Space Center. During this time she worked as an Information Specialist for the New Initiatives Of- fice and the Exploration Programs Office, and later as a Policy Ana- lyst for the Public Affairs Office. -

Alan Bean, Apollo Moonwalker and Artist, Dies at 86
For Immediate Release Media Contacts: Laura Cutchens Astronaut Scholarship Foundation 407-403-5907 or 407-474-3196 [email protected] Justin Miller Astronaut Scholarship Foundation 407-403-5908 or 407-724-3002 [email protected] Alan Bean, Apollo Moonwalker and Artist, Dies at 86 HOUSTON, Texas — Apollo and Skylab astronaut Alan Bean, the fourth human to walk on the moon and an accomplished artist, has died. Bean, 86, died on Saturday, May 26, at Houston Methodist Hospital in Houston, Texas. His death followed his suddenly falling ill while on travel in Fort Wayne, Indiana two weeks before. “Alan was the strongest and kindest man I ever knew. He was the love of my life and I miss him dearly,” said Leslie Bean, Alan Bean’s wife of 40 years. “A native Texan, Alan died peacefully in Houston surrounded by those who loved him.” A test pilot in the U.S. Navy, Bean was one of 14 trainees selected by NASA for its third group of astronauts in October 1963. He flew twice into space, first as the lunar module pilot on Apollo 12, the second moon landing mission, in November 1969, and then as commander of the second crewed flight to the United States’ first space station, Skylab, in July 1973. “Alan and I have been best friends for 55 years — ever since the day we became astronauts,” said Walt Cunningham, who flew on Apollo 7. “When I became head of the Skylab Branch of the Astronaut Office, we worked together and Alan eventually commanded the second Skylab mission.” “We have never lived more than a couple of miles apart, even after we left NASA. -

Further Analysis on the Mystery of the Surveyor III Dust Deposits
Further Analysis on the Mystery of the Surveyor III Dust Deposits l l 3 Philip Metzger , Paul Hintze , Steven Trigwele, John Lane 1 Granular Mechanic and Regolith Operations Lab, NASA, Kennedy Space Center, FL 32899 2 Applied Technology, Siera Lobo-ESC, Kennedy Space Center, FL 32899 3 Granular Mechanics and Regolith Operations, Easi-ESC, Kennedy Space Center, FL 32899 ABSTRACT The Apollo 12 lunar module (LM) landing near the Surveyor 1lI spacecraft at the end of 1969 has remained the primary experimental verification of the predicted physics of plume ejecta effects from a rocket engine interacting with the surface of the moon. This was made possible by the return of the Surveyor 1lI camera housing by the Apollo 12 astronauts, allowing detailed analysis of the composition of dust deposited by the Apollo 12 LM plume. It was soon realized after the initial analysis of the camera housing that the LM plume tended to remove more dust than it had deposited. In the present study, coupons from the camera housing were reexamined by a KSC research team using SEMIEDS and XPS analysis. In addition, plume effects recorded in landing videos from each Apollo mission have been studied for possible clues. Several likely scenarios are proposed to explain the Surveyor III dust observations. These include electrostatic attraction of the dust to the surface of the Surveyor as a result of electrostatic charging of the jet gas exiting the engine nozzle during descent; dust blown by the Apollo 12 LM fly-by while on its descent trajectory; dust ejected from the lunar surface due to gas forced into the soil by the Surveyor 1lI rocket nozzle, based on Darcy's law; and mechanical movement of dust during the Surveyor landing.