Unveiling the Physics of the Thomson Jumping Ring
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Man Jailed After Alleged Assault on Police Joe P
Today’s Weather SPORTS LIFESTYLES Mostly sunny. The high Neal Brown Charlotte Nolan: will be in the upper 50s. plans up-tempo Manger scene The low in the mid 30s offense for most meaningful and 40s ...... 2 Kentucky ...... 6 decoration ...... 5 Vol. 109 • No. 251 WEDNESDAY, DECEMBER 19, 2012 50 cents daily | $1 Saturday Man jailed after alleged assault on police Joe P. Asher Cloud would not comply bite officers, saying he alcohol intoxication in a by the Evarts Police trolled substance; Staff Writer with verbal commands, was going to kill Ashurst. public place, menacing, Department on Saturday * Linda Taylor, 47, of took an aggressive stance The citation states Cloud third-degree terroristic on charges of second- Evarts, was arrested on A Harlan man faces and advanced on and struck his girlfriend in threatening, third-degree degree burglary and sec- Monday by Kentucky multiple charges, includ- struck Ashurst, Ross and the face, and assault on a police ond-degree trafficking a State Police and charged ing assault on a police officer Hunter Luttrell. would not com- officer, disarming controlled substance; with second-degree traf- officer, after an alleged The citation notes ply with verbal a peace officer, * Timothy Hughes, 24, ficking a controlled sub- incident on Monday. Cloud was unsteady on commands to get resisting arrest, of Evarts, was arrested stance, possession of Brandon Cloud, 21, was his feet, had bloodshot inside the patrol fourth-degree by the Evarts Police synthetic cannabinoid arrested by Harlan city agonists or piperazines, police after an alleged eyes and smelled of an vehicle. Cloud assault (domestic Department on Monday alcoholic beverage. -

Tracking the Research Trope in Supernatural Horror Film Franchises
City University of New York (CUNY) CUNY Academic Works All Dissertations, Theses, and Capstone Projects Dissertations, Theses, and Capstone Projects 2-2020 Legend Has It: Tracking the Research Trope in Supernatural Horror Film Franchises Deirdre M. Flood The Graduate Center, City University of New York How does access to this work benefit ou?y Let us know! More information about this work at: https://academicworks.cuny.edu/gc_etds/3574 Discover additional works at: https://academicworks.cuny.edu This work is made publicly available by the City University of New York (CUNY). Contact: [email protected] LEGEND HAS IT: TRACKING THE RESEARCH TROPE IN SUPERNATURAL HORROR FILM FRANCHISES by DEIRDRE FLOOD A master’s thesis submitted to the Graduate Faculty in Liberal Studies in partial fulfillment of the requirements for the degree of Master of Arts, The City University of New York 2020 © 2020 DEIRDRE FLOOD All Rights Reserved ii Legend Has It: Tracking the Research Trope in Supernatural Horror Film Franchises by Deirdre Flood This manuscript has been read and accepted for the Graduate Faculty in Liberal Studies in satisfaction of the thesis requirement for the degree of Master of Arts. Date Leah Anderst Thesis Advisor Date Elizabeth Macaulay-Lewis Executive Officer THE CITY UNIVERSITY OF NEW YORK iii ABSTRACT Legend Has It: Tracking the Research Trope in Supernatural Horror Film Franchises by Deirdre Flood Advisor: Leah Anderst This study will analyze how information about monsters is conveyed in three horror franchises: Poltergeist (1982-2015), A Nightmare on Elm Street (1984-2010), and The Ring (2002- 2018). My analysis centers on the changing role of libraries and research, and how this affects the ways that monsters are portrayed differently across the time periods represented in these films. -

Race in Hollywood: Quantifying the Effect of Race on Movie Performance
Race in Hollywood: Quantifying the Effect of Race on Movie Performance Kaden Lee Brown University 20 December 2014 Abstract I. Introduction This study investigates the effect of a movie’s racial The underrepresentation of minorities in Hollywood composition on three aspects of its performance: ticket films has long been an issue of social discussion and sales, critical reception, and audience satisfaction. Movies discontent. According to the Census Bureau, minorities featuring minority actors are classified as either composed 37.4% of the U.S. population in 2013, up ‘nonwhite films’ or ‘black films,’ with black films defined from 32.6% in 2004.3 Despite this, a study from USC’s as movies featuring predominantly black actors with Media, Diversity, & Social Change Initiative found that white actors playing peripheral roles. After controlling among 600 popular films, only 25.9% of speaking for various production, distribution, and industry factors, characters were from minority groups (Smith, Choueiti the study finds no statistically significant differences & Pieper 2013). Minorities are even more between films starring white and nonwhite leading actors underrepresented in top roles. Only 15.5% of 1,070 in all three aspects of movie performance. In contrast, movies released from 2004-2013 featured a minority black films outperform in estimated ticket sales by actor in the leading role. almost 40% and earn 5-6 more points on Metacritic’s Directors and production studios have often been 100-point Metascore, a composite score of various movie criticized for ‘whitewashing’ major films. In December critics’ reviews. 1 However, the black film factor reduces 2014, director Ridley Scott faced scrutiny for his movie the film’s Internet Movie Database (IMDb) user rating 2 by 0.6 points out of a scale of 10. -

J-Horror and the Ring Cycle
Media students/03/c 3/2/06 8:16 am Page 94 CASECASE STUDY:STUDY: J-HORROR J-HORROR AND AND THE THE RING RINGCYCLECYCLE 1 2 3 4 5 6 7 • Horror cycles • Industry exploitation and circulation 8 • The beginnings of the Ring cycle • Fandom and the global concept of genre 9 • Replenishing the repertoire through repetition and • Summary: generic elements and classification 10 difference • References and further reading 11 • Building on the cycle 12 13 14 Horror cycles references to Carol Clover’s work in Chapter 3). The 15 ‘knowingness’ about horror, and cinema generally, 16 Chapter 3 emphasises the fluidity of genre as a in these films was often developed as comedy (e.g. in 17 concept, the constantly changing repertoires of Scream 2 (1998), the classroom discussion about film 18 elements and the possibility of different forms of sequels). The success of the cycle was exploited 19 ‘classification’ by producers, critics and audiences. further with a ‘spoof’ of the ‘spoof’ in the Scary Movie 20 Horror is a genre with some special characteristics series. 21 in cinema: At the end of the decade, a rather different kind of 22 consistently popular since the 1930s in Hollywood • film, a ‘ghost story with a twist’, The Sixth Sense (1999), 23 and earlier in some other national cinemas was a massive worldwide hit. It was followed by the 24 attracting predominantly youth audiences • Spanish film The Others (2001) and several other ghost 25 until the late 1960s, not given the status of a major • stories, some of which looked back to gothic traditions 26 studio release (the isolated country house shrouded in fog in The 27 ‘open’ to the influence of changes in society – in • Others), while others were more contemporary in 28 both ‘metaphorical’ (i.e. -
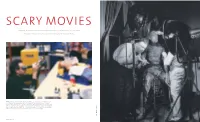
Fright—In All of Its Forms—Has Always Been an Essential Part of the Moviegoing Experience
SCARY MOVIES Fright—in all of its forms—has always been an essential part of the moviegoing experience. No wonder directors have figured out so many ways to horrify an audience. FINAL TOUCHES: (opposite) Director Karl Freund and makeup artist Jack P. Pierce spent eight hours a day applying Boris Karloff’s makeup in The Mummy (1932). This was the first directing job for the noted German cinematographer Freund, who was hired two days before production started. (above) John Lafia scopes out Chucky, a doll possessed by the RES soul of a serial killer, in Child’s Play 2 (1990). Lafia made the 18-inch, half-pound plastic U ICT doll seem menacing rather than silly by the clever use of camera angles. P PHOTOS: UNIVERSAL UNIVERSAL PHOTOS: 54 dga quarterly dga quarterly 55 BLOOD BATH: Brian De Palma orchestrates the scene in Carrie (1976) in which UNDEAD: George A. Romero, surrounded by his cast of zombies on Dawn of the Carrie throws knives at her diabolical mother, played by Piper Laurie. De Palma Dead (1978), saved on production costs by having all the 35 mm film cast Laurie because he didn’t want the character to be “the usual dried-up old stock developed in 16 mm. He chose his takes, then had them developed crone at the top of the hill,” but beautiful and sexual. in 35. Romero convinced the distributor to release the film unrated. PHOTOFEST PHOTOFEST ) ) RIGHT BOTTOM VERETT; (boTTOM right) right) (boTTOM VERETT; E RTESY: RTESY: U O RES/DREAMWORKS; ( RES/DREAMWORKS; C U NT/ ICT U P NT NT U ARAMO P ARAMO P ) ) LEFT ; (boTTOM left) © © left) (boTTOM ; BOTTOM ; ( ; MGM EVERETT OLD SCHOOL: The Ring Two (2005), with Naomi Watts, was Hideo Nakata’s first CUt-rATE: Director Tobe Hooper got the idea for The Texas Chainsaw Massacre PIONEER: Mary Lambert, on the set of Pet Sematary (1989) with Stephen GOOD LOOKING: James Whale, directing Bride of Frankenstein (1935), originally American feature after directing the original two acclaimed Ring films in Japan. -

Beam Stability Studies and Improvements at Aladdin∗
Proceedings of the 1999 Particle Accelerator Conference, New York, 1999 BEAM STABILITY STUDIES AND IMPROVEMENTS AT ALADDIN∗ W. S. Trzeciak, M. A. Green, and the SRC Staff, Synchrotron Radiation Center, 3731 Schneider Dr., Stoughton, WI, 53589-3097, USA Abstract 2 POSITION STABILITY Recent improvements in beam position stability 2.1 General at Aladdin, the 1 GeV electron storage ring at the Several improvements in the structure of the Synchrotron Radiation Center, are reported. Stabilizing vacuum chamber have been made over the last few years. = the beam position monitors (BPM s), in conjunction with New stripline pairs, used as beam position monitors the use of a global feedback system, keeps the beam (BPM’s), have been installed in the whole ring, except for " µ position within 3 m of its starting value during a user one final long straight section. The new monitors are fill. Relocation of transformers and the dipole power thicker and more robust; there is essentially no warpage supply choke have made substantial reductions in the during bakeout or when heated by synchrotron radiation. 60 and 720 Hz motions of the electron beam, allowing a The monitors are mounted in chamber sections that pass broader scope to the infrared experimental program. through quadrupoles that are now uncoupled, via a Work on stabilizing the synchrotron radiation source bellows, from the downstream dipole vacuum chamber characteristics under various operating conditions is section. In the past, small changes in the dipole section presented. Studies of weak resonances near the standard position, e.g. to reset a photon-beamline port, would operating tune are leading to the use of closed loop tune change the BPM position in the upstream quadrupole control to maintain beam size stability. -

Reviews of the Ring Series the Ring Series, Also Known As “Ringu
Reviews of The Ring Series The Ring series, also known as “Ringu” or just “Ring”, is considered the founding factor in the west’s interest in Japanese horror and helped bridge the gap between international films. Based on a series of novels written by Koji Suzuki, the films revolve around a cursed videotape that kills anyone who watches it after seven days. Though the first book is a horrormystery, its two sequels Spiral and Loop are a medical mystery and a science fiction mystery respectively, all having intriguing storylines and plot twists that explore the sinister virus that originates from the videotape rather than a haunting curse. The Ring series has spawned a TV movie, two TV series, a fantastic Japanese film series, a crumby Korean film, and a respectible American movies too. And we’re gonna review all of them in this megareview. The franchise reflects a lot of modern fears in society – a fear of technology, urban legends, deadly illnesses (the AIDS scare in the 1980s and 1990s), unexpected pregnancy (as seen in Spiral), and the more traditional scares of evil and monsters. The main antagonist, Sadako Yamamura, takes a lot of inspiration from Japanese mythology and traditions. She is an “onryō”, or a vengeful female spirit, sporting the traditional long stringy hair and wears a white dress. Her origin is based on several folktales, most notably about a woman who is chucked down a well, where she dies and rises as a ghost. Obviously, there will be spoilers for the books and films throughout these minireviews, so be weary. -
The Genre of Horror
American International Journal of Contemporary Research Vol. 2 No. 4; April 2012 The Genre of Horror Mgr. Viktória Prohászková Department of Massmedia Communication University of Ss. Cyrill and Method Trnava Abstract The study deals with the genre of horror, outlining it and describing the dominant features and typological variations. It provides a brief overview of the development process in the realm of literature, film and computer games and outlines its appearance in other fields of culture and art. It characterises the readers and viewers of horror works and their motives for seeking the genre. The thesis wants to introduce the genre, its representants in Slovak and Czech literature. Key words: genre, subgenre, horror, dread, short story, novel, film, writer, director, game, violence, blood, danger, mystical, supernatural phenomenon, ghost, monster, vampire, zombie, werewolf, murderer. 1. Introduction The oldest and strongest human emotion is fear. It is embedded in people since time began. It was fear that initiated the establishment of faith and religion. It was the fear of unknown and mysterious phenomena, which people could not explain otherwise than via impersonating a high power, which decides their fates. To every unexplainable phenomenon they attributed a character, human or inhuman, which they associated with supernatural skills and invincible power. And since the human imagination knows no limits, a wide scale of archetypal characters have been created, such as gods, demons, ghosts, spirits, freaks, monsters or villains. Stories and legends describing their insurmountable power started to spread about them. Despite the fact by the development of science many so far incomprehensible phenomena have been explained, these archetypes and legends are still being used in literature and other branches of art. -
RCU the Ultimate Retaining Ring Guide
® TABLE OF CONTENTS What Is a Retaining Ring?......................................................................1 Axial Retaining Rings............................................................................. 3 Internal, HO................................................................................4 External, SH...............................................................................6 Inverted, HOI (Internal).............................................................. 8 Inverted, SHI (External)............................................................. 9 Internal/Bowed, BHO............................................................... 10 External/Bowed, BSH............................................................... 11 Beveled, VHO (Internal), VSH (External)..................................12 Reinforced, External, SHR........ ........ ....... ............................. 13 Tamper-proof, External, SHM................................................... 13 Assembly Tools......…………………………………….................14 Summary...............……………………………………..................15 Radial Retaining Rings.................................…………………………..... 17 External, E................................................................................ 18 Reinforced, External, RE................................…………………. 20 Bowed, External, BE.................................................................21 External, Crescent, C............................................................... 22 Interlocking, External, LC........................................................ -

The Uncanny Child in Transnational Cinema
FILM CULTURE IN TRANSITION The Uncanny Child in Transnational Cinema Ghosts of Futurity at the Turn of the Twenty-First Century jessica balanzategui The Uncanny Child in Transnational Cinema The Uncanny Child in Transnational Cinema Ghosts of Futurity at the Turn of the Twenty-First Century Jessica Balanzategui Amsterdam University Press Excerpts from the conclusion previously appeared in Terrifying Texts: Essays on Books of Good and Evil in Horror Cinema © 2018 Edited by Cynthia J. Miller and A. Bowdoin Van Riper by permission of McFarland & Company, Inc., Box 611, Jefferson NC 28640. Excerpts from Chapter Four previously appeared in Monstrous Children and Childish Monsters: Essays on Cinema’s Holy Terrors © 2015 Edited by Markus P.J. Bohlmann and Sean Moreland by permission of McFarland & Company, Inc., Box 611, Jefferson NC 28640. Cover illustration: Sophia Parsons Cope, 2017 Cover design: Kok Korpershoek, Amsterdam Lay-out: Crius Group, Hulshout Amsterdam University Press English-language titles are distributed in the US and Canada by the University of Chicago Press. isbn 978 94 6298 651 0 e-isbn 978 90 4853 779 2 (pdf) doi 10.5117/9789462986510 nur 670 © J. Balanzategui / Amsterdam University Press B.V., Amsterdam 2018 All rights reserved. Without limiting the rights under copyright reserved above, no part of this book may be reproduced, stored in or introduced into a retrieval system, or transmitted, in any form or by any means (electronic, mechanical, photocopying, recording or otherwise) without the written permission of both the copyright owner and the author of the book. Table of Contents Acknowledgements 7 Introduction 9 The Child as Uncanny Other Section One Secrets and Hieroglyphs: The Uncanny Child in American Horror Film 1. -

TITLE CALL NUMBER for Film Information, Follow This Link: Www
For film information, follow this link: www.imdb.com TITLE FORMAT CALL NUMBER (500) days of Summer DVD PN 1997.2 .F58 2009 (Un)qualified: how God uses broken people to do big things AB CD BV 4598.2 .F87 2016 *Batteries not included DVD PN 1997 .B377 B377 1999 21 DVD PN 1997.2 .A149 A149 2008 300 DVD PN 1997.2 .E79 T4744 2007 1408 DVD PN 1995.9 .H6 F6878446 2007 2012 DVD PN 1997.2 .T835 2010 2 fast 2 furious DVD PN 1997 .F377 F377 2003 2 guns BLU-RAY PN 1997.2 .A12 2013 2 guns DVD PN 1997.2 .A12 2013 2nd chance AB CD PS 3566 .A822 A614 2002 3:10 to Yuma DVD PN 1997.2 .A138 A138 2007 3 comedy film favorites. Dodgeball DVD PN 1995.9 .C55 V38 2014 V.3 3 comedy film favorites. The internship DVD PN 1995.9 .C55 V38 2014 V.1 3 comedy film favorites. The watch DVD PN 1995.9 .C55 V38 2014 V.2 3 days to kill DVD PN 1997.2 .A15 2014 4 classic film favorites : Affair to remember DVD PN 1997 .A1 F68 2014 V.1 4 classic film favorites : Laura DVD PN 1997 .A1 F68 2014 V.2 4 classic film favorites : A letter to three wives DVD PN 1997 .A1 F68 2014 V.3 4 classic film favorites : The three faces of Eve DVD PN 1997 .A1 F68 2014 V.4 4 film favorites. Western collective DVD PN 1997 .Y68 2010 4 Film favorites: Girl's night collection: Chasing liberty DVD PN 1997 .E88 2010 V.4 4 Film favorites: Girl's night collection: Cinderella story DVD PN 1997 .E88 2010 V.1 4 Film favorites: Girl's night collection: Sisterhood of the traveling pants DVD PN 1997 .E88 2010 V.3 4 Film favorites: Girl's night collection: What a girl wants DVD PN 1997 .E88 2010 V.2 4 for Texas DVD PN 1995.9 .W4 F62 2005 The 5th wave DVD PN 1997.2 .A15 2016 The 6th day DVD PN 1997 .S597 S597 2001 9-1-1. -

100 Runaway Jury 102 the Bad News Bears Go to Japan 103 Mall Cop 2
100 Runaway Jury 102 The Bad News Bears Go To Japan 103 Mall cop 2 DVD&BLU 104 Spiderman 2 105 Under the Tuscan Sun 107 Unconditional Love 108 City By The Sea 110 Matchstick Men 111 The Replacements 112 Not Another Teen Movie 113 The Natural 114 Shanghai Knights 115 Mall Cop BLU RAY ONLY 116 Radio 117 In The Cut 118 Porky's 119 Rogue One: A starwars story 120 Fantastic Beasts and where to find them 121 Poltergeist 122 The Wubbulous World of Dr. Seuss 123 Lost In Translation 124 Hidden Figures 125 Good Boy 126 Project Alminac 127 25th Hour 128 Looney Tunes: Back In Action 129 Edtv 130 Grumpier Old Men 131 Extreme Ops 132 Insurgent 133 The Dark Crystal 134 The Hunchback of Notre Dame 2 135 Seabiscuit 136 21 Grams 137 The Goonies 138 The Bad News Bears (1976) 139 About Schmidt 140 The Lady Killers 141 Kill Bill Vol. 1 142 10 143 The Story of Us 144 Master and Commander 145 Hot Pursuit 146 Calendar Girls 147 The Rescuers 148 Something's Gotta Give 150 Lego Batman movie 151 Fist Fight 152 The Big Bounce 153 3 Ninjas: Knuckle Up 154 Mystic River 155 The Whole Ten Yards 156 The Passion of the Christ 157 Little Boy 158 Godzilla 159 Big Fish 160 Starsky and Hutch 161 Shattered Glass 162 Nothing But Trouble 163 Cheaper By The Dozen 164 The Cat In The Hat 165 Elvis The Complete Story 166 Desperate Measures 167 How To Lose A Guy In 10 Days 168 Eight Crazy Nights 169 Touching The Void 170 Scent Of A Woman 171 American Beauty 173 The Station 174 Bruce Almighty 175 Unfriended 176 Chow Yun-Fat Hong Kong 1941 177 Kill Bill vol 2 178 Mad Max 179 Dancer