High-Voltage Integrated Linear Regulator with Current Sinking Capabilities for Portable Ultrasound Scanners
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

TL431-Q1 / TL432-Q1 Adjustable Precision Shunt Regulator Datasheet
Product Order Technical Tools & Support & Folder Now Documents Software Community TL431-Q1, TL432-Q1 SGLS302G –MARCH 2005–REVISED MAY 2020 TL431-Q1 / TL432-Q1 Adjustable Precision Shunt Regulator 1 Features 3 Description The TL431LI-Q1 / TL432LI-Q1 are pin-to-pin 1• Qualified for automotive applications alternatives to TL431-Q1 / TL432-Q1. TL43xLI-Q1 • AEC-Q100 test guidance with the following: offers better stability, lower temperature drift – Device temperature grade 1: –40°C to 125°C (VI(dev)), and lower reference current (Iref) for ambient operating temperature range improved system accuracy. • Reference voltage tolerance at 25°C: The TL431-Q1 is a three-pin adjustable shunt – 1% (A Grade) regulator with specified thermal stability over – 0.5% (B Grade) applicable automotive temperature ranges. The output voltage can be set to any value from VREF • Typical temperature drift: (approximately 2.5 V) to 36 V, with two external – 14 mV (Q Temp) resistors (see Figure 28). This device has a typical • Low output noise output impedance of 0.2 Ω. Active output circuitry provides a sharp turnon characteristic, making this • 0.2-Ω Typical output impedance device an excellent replacement for Zener diodes in • Sink-current capability: 1 mA to 100 mA many applications, such as onboard regulation, • Adjustable output voltage: VREF to 36 V adjustable power supplies, and switching power supplies. 2 Applications The TL432-Q1 has exactly the same functionality and • Adjustable voltage and current referencing electrical specifications as the TL431-Q1 device, but has a different pinout for the DBZ package. • Secondary side regulation in flyback SMPSs • Zener replacement Device Information(1) • Voltage monitoring PART NUMBER PACKAGE BODY SIZE (NOM) • Comparator with integrated reference TL431A-Q1 SOT-23 (5) 2.90 mm × 1.60 mm TL43x-Q1 SOT-23 (3) 2.92 mm × 1.30 mm (1) For all available packages, see the orderable addendum at the end of the data sheet. -

Low-Voltage Cutoff Circuits
jfsimon – June 2018 Low-voltage cutoff circuits Using a TL431 or similar: Battery Guardian (Silicon Chip, 2002) http://www.qsl.net/9w2lw/guardian.htm LM336, comparator, N-channel MOSFET on high side driven by isolated SMPS Forum post, LV alarm, MikeML (15 March 2010) https://www.electro-tech-online.com/threads/12v-battery-low-voltage-monitor.104886/#post-856427 TL431, LED driven by NPN BJT Forum post, LV disconnect 1, MikeML (4 February 2011) https://www.electro-tech-online.com/threads/12v-battery-low-voltage-monitor.104886/page-2#post-950306 TL431, P-channel MOSFET, hysteresis resistor Same circuit from RONV (13 February 2016) https://forum.allaboutcircuits.com/threads/voltage-cut-off-tl431.120827/#post-965055 Same circuit from Hero999 (20 February 2017) https://www.eevblog.com/forum/projects/power-the-load-only-when-car-supply-voltage-is-above-14- volts/msg1140485/#msg1140485 Variant of the same circuit with ATL431 (20 February 2017) https://www.eevblog.com/forum/projects/power-the-load-only-when-car-supply-voltage-is-above-14- volts/msg1140526/#msg1140526 Forum post, LV disconnect 2, MikeML (11 February 2014) https://forum.allaboutcircuits.com/threads/tl431-battery-cut-off.94148/#post-696553 TL431, P-channel MOSFET, push-button, battery voltage is measured at MOSFET drain Forum post, Ian.M (9 August 2016) https://www.eevblog.com/forum/renewable-energy/efficient-way-to-disconnect-battery-when-voltage- drops/msg1000473/#msg1000473 TL431, NPN emitter follower, Schottky diode, P-channel MOSFET jfsimon – June 2018 Driving a relay directly with a TL431, push button to start Note: I tested this one but I haven’t been able to get reliable triggering of the relay. -

AN-500: Depletion-Mode Power Mosfets and Applications
INTEGRATED CIRCUITS DIVISION Application Note AN-500 Depletion-Mode Power MOSFETs and Applications AN-500-R03 www.ixysic.com 1 INTEGRATED CIRCUITS DIVISION AN-500 1 Introduction Applications like constant current sources, solid state relays, and high voltage DC lines in power systems require N-channel depletion-mode power MOSFETs that operate as normally-on switches when the gate-to-source voltage is zero (VGS=0V). This paper will describe IXYS IC Division’s latest N-channel, depletion-mode, power MOSFETs and their application advantages to help designers to select these devices in many industrial applications. Figure 1 N-Channel Depletion-Mode MOSFET D ID + G V + DS IG V - GS I - S S A circuit symbol for an N-channel depletion-mode power MOSFET is given in Figure 1. The terminals are labeled as G (gate), S (source) and D (drain). IXYS IC Division depletion-mode power MOSFETs are built with a structure called vertical double-diffused MOSFET, or DMOSFET, and have better performance characteristics when compared to other depletion-mode power MOSFETs on the market such as high VDSX, high current, and high forward biased safe operating area (FBSOA). Figure 2 shows a typical drain current characteristic, ID, versus the drain-to-source voltage, VDS, which is called the output characteristic. It’s a similar plot to that of an N-channel enhancement mode power MOSFET except that it has current lines at VGS equal to -2V, -1.5V, -1V, and 0V. Figure 2 CPC3710 - MOSFET Output Characteristics Output Characteristics (TA=25ºC) 300 270 VGS=0.0V 240 210 V =-1.0V 180 GS 150 (mA) D I 120 V =-1.5V 90 GS 60 V =-2.0V 30 GS 0 0123456 VDS (V) The on-state drain current, IDSS, a parameter defined in the datasheet, is the current that flows between the drain and the source at a particular drain-to-source voltage (VDS), when the gate-to-source voltage (VGS) is zero (or short-circuited). -

An 201610 Pl16 01
AN_201610_PL16_01 Using the IRS2982S in a PFC Flyback with opto-isolated feedback Authors: Peter B. Green About this document Scope and purpose The purpose of this document is to provide a comprehensive guide to using the IRS2982S control IC for LED drivers in a single stage PFC-Flyback converter, which instead of using the transformer auxiliary winding for voltage regulation, uses an opto-isolated secondary feedback circuit for voltage and/or current regulation. The scope applies to all technical aspects that should be considered in the design process, including calculation of external component values, with a focus on designing the feedback loop to avoid instability. Intended audience Power supply design engineers, applications engineers, students. Table of Contents About this document .............................................................................................................................................1 Table of Contents ..................................................................................................................................................1 1 Introduction.......................................................................................................................................2 2 IRS2982S functional overview............................................................................................................4 3 MOSFET selection ..............................................................................................................................6 4 Voltage regulating -

UTC Product Introduction
UNISONIC TECHNOLOGIES CO., LTD. http://www.unisonic.com.tw UTC Product Introduction 1 Integrated Device Manufacturer Site Capacity 1. Circuit design Power & Analog Integrated Circuit Taiwan x 2 2. Pattern layout Design High-quality Semiconductor Device China x 6 3. Process development (XiaMen) Jaysun 6” CMOS/BiCMOS/DMOS Semiconductor 50k->100k(2019)/ month Manufacturing Wafer (FuZhou) 8”,6”CMOS/Bipolar/BiCMOS Vertical Fushun, Heshun 100k / month Integration Microelectronics (FuZhou) Fushun Packaging Assembly / Final test Semiconductor 400M / month Manufacturing Taiwan, China, Korea, Japan, Sales Germany, Turkey, USA Europe China Korea Japan Turkey USA India Taiwan ASEAN 2 Product Tree IC (Integrated Circuit) Discrete Component PWM Controller Lighting Driver FRED Diode Bridge Rectifier Super-junction Photo-Coupler Voltage Reference Schottky Rectifier MOSFET DC Converter Regulator / LDO Low-VF Rectifier Planar MOSFET USB Power Switch Reset / Volt. Detect Digital Transistor Trench MOSFET Comparator 74- Logic IC Power Transistor JFET Op Amplifier Audio IC / Amplifier RS-232/485 IC Darlington Driver TRIAC SCR Hall IC Special IC IGBT TVS / ESD Array 3 Power / Lighting Application Mobile Charger AC-DC PWM Fly-back Green Mode (60W) (cellphone, battery pack, Controller IC Primary-side Regulation (20W) USB powered device…) Isolated PSR driver Lighting Driver Adaptor Non-isolated buck / linear driver Photo-Coupler (Laptop, set-top box, WiFi router, monitor…) 2nd-side Volt. Ref. (TL431) supporting IC CC/CV Circuit (TL431+Op Amp) Power Module Supervisory IC (Desktop, PoS, server, Bridge Rectifier (ABS/DFM/MBF/MBS) whitegoods, TV…) Fast-recovery Diode (SMD/THD/Axial) High-voltage Depletion MOSFET (UF601Q) Discrete Planar MOSFET (~1500V) Component Super-junction MOSFET (500~950V) Lighting / Dimming SCR (~1000V) Power Control TRIAC (~900V) (Bulb, tube, ballast, nd MOSFET (DFN5060 DFN3030) dimmer, power control) 2 -side Discrete Component Schottky/MGBR/TGBR low-V 4 F Product PN. -

TL431, A, B Series, NCV431A Programmable Precision References
TL431,A,BSeries, NCV431A Programmable PrecisionReferences The TL431, A, B integrated circuits are three−terminal programmable shunt regulator diodes. These monolithic IC voltage http://onsemi.com references operate as a low temperature coefficient zener which is TO−92 (TO−226) programmable from Vref to 36 V with two external resistors. These LP SUFFIX devices exhibit a wide operating current range of 1.0 mA to 100 mA CASE 29 with a typical dynamic impedance of 0.22 W. The characteristics of these references make them excellent replacements for zener diodes in Pin 1. Reference many applications such as digital voltmeters, power supplies, and op 1 2 2. Anode amp circuitry. The 2.5 V reference makes it convenient to obtain a 3 3. Cathode stable reference from 5.0 V logic supplies, and since the TL431, A, B operates as a shunt regulator, it can be used as either a positive or negative voltage reference. PDIP−8 P SUFFIX CASE 626 Features 8 • Programmable Output Voltage to 36 V 1 • ± ° Micro8E Voltage Reference Tolerance: 0.4%, Typ @ 25 C (TL431B) DM SUFFIX • W 8 Low Dynamic Output Impedance, 0.22 Typical 1 CASE 846A • Sink Current Capability of 1.0 mA to 100 mA • Equivalent Full−Range Temperature Coefficient of 50 ppm/°C Cathode 1 8 Reference Typical • N/C 2 7 N/C Temperature Compensated for Operation over Full Rated Operating N/C 3 6 Anode Temperature Range N/C 4 5 N/C • Low Output Noise Voltage (Top • Pb−Free Packages are Available View) SOIC−8 8 D SUFFIX CASE 751 1 Cathode 1 8 Reference 2 7 Anode Anode 3 6 N/C 4 5 N/C (TopView) This is an internally modified SOIC−8 package. -

TL431, A, B Series, NCV431A, B
TL431, A, B Series, NCV431A, B Programmable Precision References The TL431, A, B integrated circuits are three−terminal programmable shunt regulator diodes. These monolithic IC voltage http://onsemi.com references operate as a low temperature coefficient zener which is TO−92 (TO−226) programmable from Vref to 36 V with two external resistors. These LP SUFFIX devices exhibit a wide operating current range of 1.0 mA to 100 mA CASE 29 with a typical dynamic impedance of 0.22 W. The characteristics of these references make them excellent replacements for zener diodes in Pin 1. Reference many applications such as digital voltmeters, power supplies, and op 1 2 2. Anode amp circuitry. The 2.5 V reference makes it convenient to obtain a 3 3. Cathode stable reference from 5.0 V logic supplies, and since the TL431, A, B operates as a shunt regulator, it can be used as either a positive or negative voltage reference. PDIP−8 P SUFFIX CASE 626 Features 8 • Programmable Output Voltage to 36 V 1 • ± ° Micro8E Voltage Reference Tolerance: 0.4%, Typ @ 25 C (TL431B) DM SUFFIX • W 8 Low Dynamic Output Impedance, 0.22 Typical 1 CASE 846A • Sink Current Capability of 1.0 mA to 100 mA • Equivalent Full−Range Temperature Coefficient of 50 ppm/°C Typical • Cathode 1 8 Reference Temperature Compensated for Operation over Full Rated Operating N/C 2 7 N/C Temperature Range N/C 3 6 Anode • Low Output Noise Voltage N/C 4 5 N/C • These are Pb−Free and Halide−Free Devices (Top View) SOIC−8 8 D SUFFIX CASE 751 1 Cathode 1 8 Reference 2 7 Anode Anode 3 6 N/C 4 5 N/C (Top View) This is an internally modified SOIC−8 package. -

Design Guide Icl88xx High Power Factor Flyback Converter
DG_2103_PL39_2104_160011 ICL88xx flyback design guide For high power factor flyback converter with constant voltage output About this document Scope and purpose The ICL88xx family of single-stage power factor correction (PFC)/flyback controllers for constant voltage (CV) output is tailored to meet LED lighting regulatory requirements and satisfy LED lighting applications, including LED drivers with dim-to-off requirements. This document is a design guide to using ICL88xx as a single-stage PFC flyback converter at 41.6 W. It has features such as low standby power consumption (ICL8810 and ICL8820) and outstanding PFC and low total harmonic distortion (THD) at full load as well as at low load conditions. The PWM jitter feature (ICL8820) allows for ease of EMI compliance, and reduces the size, count and cost of external components for emergency lighting application in DC operation. The evaluation board regulates a CV output, and is intended to be used with a constant current (CC) converter for LED lighting applications. The design guide takes the reader step by step through the design process of high power factor (HPF) flyback converters and explains each step using a 52 V/41.6 W converter as an example. Intended audience This design guide is intended for power supply design engineers and field application engineers. Table of contents About this document ....................................................................................................................... 1 Table of contents ........................................................................................................................... -

TL431/TL431A Programmable Shunt Regulator
www.fairchildsemi.com TL431/TL431A Programmable Shunt Regulator Features Description • Programmable Output Voltage to 36 Volts The TL431/TL431Aare three-terminal adjustable regulator • Low Dynamic Output Impedance 0.20 Typical series with a guaranteed thermal stability over applicable • Sink Current Capability of 1.0 to 100mA temperature ranges. The output voltage may be set to any • Equivalent Full-Range Temperature Coefficient of value between VREF (approximately 2.5 volts) and 36 volts 50ppm/°C Typical with two external resistors These devices have a typical • Temperature Compensated For Operation Over Full Rated dynamic output impedance of 0.2W Active output circuitry Operating Temperature Range provides a very sharp turn-on characteristic, making these • Low Output Noise Voltage devices excel lent replacement for zener diodes in many • Fast Turn-on Response applications. TO-92 1 1. Ref 2. Anode 3. Cathode 8-DIP 1 1.Cathode 2.3.4.5.7.NC 6.Anode 8.Ref 8-SOP 1 1. Cathode 2. 3. 6. 7. Anode 8. Ref 4. 5. NC Rev. 1.0.3 ©2003 Fairchild Semiconductor Corporation TL431/TL431A Internal Block Diagram Absolute Maximum Ratings (Operating temperature range applies unless otherwise specified.) Parameter Symbol Value Unit Cathode Voltage VKA 37 V Cathode Current Range (Continuous) IKA -100 ~ +150 mA Reference Input Current Range IREF -0.05 ~ +10 mA Power Dissipation D, LP Suffix Package PD 770 mW P Suffix Package 1000 mW Operating Temperature Range TOPR -25 ~ +85 °C Junction Temperature TJ 150 °C Storage Temperature Range TSTG -65 ~ +150 °C Recommended Operating Conditions Parameter Symbol Min Typ Max Unit Cathode Voltage VKA VREF -36V Cathode Current IKA 1.0 - 100 mA 2 TL431/TL431A Electrical Characteristics (TA = +25°C, unless otherwise specified) TL431 TL431A Parameter Symbol Conditions Unit Min. -
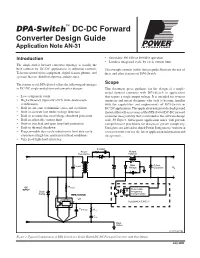
Application Note AN-31
DPA-Switch™ DC-DC Forward Converter Design Guide Application Note AN-31 Introduction • Selectable 300 kHz or 400 kHz operation • Lossless integrated cycle-by-cycle current limit The single-ended forward converter topology is usually the best solution for DC-DC applications in industrial controls, The example circuits in this design guide illustrate the use of Telecom central office equipment, digital feature phones, and these and other features of DPA-Switch. systems that use distributed power architectures. The feature set of DPA-Switch offers the following advantages Scope in DC-DC single-ended forward converter designs: This document gives guidance for the design of a single- ended forward converter with DPA-Switch in applications • Low component count that require a single output voltage. It is intended for systems • High efficiency (typically >91% with synchronous engineers and circuit designers who wish to become familiar rectification) with the capabilities and requirements of DPA-Switch in • Built in soft-start to minimize stress and overshoot DC-DC applications. This application note provides background • Built in accurate line under-voltage detection material that will assist users of the DPA-Switch DC-DC forward • Built-in accurate line overvoltage shutdown protection converter design utility that is included in the software design • Built in adjustable current limit tool, PI Expert. Subsequent application notes will provide • Built-in overload and open loop fault protection comprehensive procedures for designs of greater complexity. • Built-in thermal shutdown Designers are advised to check Power Integrationsʼ website at • Programmable duty cycle reduction to limit duty cycle www.powerint.com for the latest application information and excursion at high line and transient load conditions design tools. -

TL431, TL432 Adjustable Precision Shunt Regulator (Rev. O)
Product Sample & Technical Tools & Support & Folder Buy Documents Software Community TL431, TL431A, TL431B TL432, TL432A, TL432B SLVS543O –AUGUST 2004–REVISED JANUARY 2015 TL43xx Precision Programmable Reference 1 Features 3 Description The TL431 and TL432 devices are three-terminal 1• Reference Voltage Tolerance at 25°C adjustable shunt regulators, with specified thermal – 0.5% (B Grade) stability over applicable automotive, commercial, and – 1% (A Grade) military temperature ranges. The output voltage can – 2% (Standard Grade) be set to any value between Vref (approximately 2.5 V) and 36 V, with two external resistors. These • Adjustable Output Voltage: V to 36 V ref devices have a typical output impedance of 0.2 Ω. • Operation From −40°C to 125°C Active output circuitry provides a very sharp turn-on • Typical Temperature Drift (TL431B) characteristic, making these devices excellent – 6 mV (C Temp) replacements for Zener diodes in many applications, such as onboard regulation, adjustable power – 14 mV (I Temp, Q Temp) supplies, and switching power supplies. The TL432 • Low Output Noise device has exactly the same functionality and • 0.2-Ω Typical Output Impedance electrical specifications as the TL431 device, but has different pinouts for the DBV, DBZ, and PK packages. • Sink-Current Capability: 1 mA to 100 mA • Both the TL431 and TL432 devices are offered in 2 Applications three grades, with initial tolerances (at 25°C) of 0.5%, 1%, and 2%, for the B, A, and standard grade, • Adjustable Voltage and Current Referencing respectively. In addition, low output drift versus • Secondary Side Regulation in Flyback SMPSs temperature ensures good stability over the entire temperature range. -
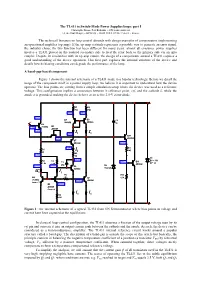
The TL431 in Loop Control
The TL431 in Switch-Mode Power Supplies loops: part I Christophe Basso, Petr Kadanka − ON Semiconductor 14, rue Paul Mesplé – BP53512 - 31035 TOULOUSE Cedex 1 - France The technicall literature on loop control abounds with design examples of compensators implementing an operational amplifier (op amp). If the op amp certainly represents a possible way to generate an error signal, the industry choice for this function has been different for many years: almost all consumer power supplies involve a TL431 placed on the isolated secondary side to feed the error back to the primary side via an opto coupler. Despite its similarities with its op amp cousin, the design of a compensator around a TL431 requires a good understanding of the device operation. This first part explores the internal structure of the device and details how its biasing conditions can degrade the performance of the loop. A band-gap-based component Figure 1 shows the internal schematic of a TL431 made in a bipolar technology. Before we detail the usage of the component itself in a power supply loop, we believe it is important to understand how the device operates. The bias points are coming from a simple simulation setup where the device was used as a reference voltage. This configuration implies a connection between it reference point, ref , and the cathode k, while the anode a is grounded, making the device behave as an active 2.5-V zener diode. k R7 R8 760 760 7.01V 7.01V 12 13 7.07V Q8 Q9 C2 ref 2N3906 2N3906 8p Q2 2.49V 2N3904 Q3 2N3904 1.87V 4 I I 6.46V 1 1 14 Q10 1.24V 2 2N3904 Q7 2N3904 637mV 16 1.29V R9 10 R1 I 240 2k 1 R6 1.12V 4K 17 3 D1 970mV R2 BV = 36V R3 11 584mV Q11 C1 N = 1.3 1.9k 5.7k 2N3904 20p D2 585mV 581mV Q6 1N4148 5 6 2N3904 3I 1 I1 R5 R10 Q4 4k Q1 6.6k 2N3904 580mV9 2N3904 Area = 3 Q5 45.9mV 2N3904 7 Area = 6 I I R4 1 1 482 a Figure 1 : the internal schematic of a typical TL431 from ON Semiconductor where bias points in voltage and current have been captured at the equilibrium.