Study of Active Filters Topologies for Telecommunications Applications Cristian Andriesei
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Experiment 5 Resonant Circuits and Active Filters
Introductory Electronics Laboratory Experiment 5 Resonant circuits and active filters Now we return to the realm of linear analog circuit design to consider the final op-amp circuit topic of the term: resonant circuits and active filters. Two-port networks in this category have transfer functions which are described by linear, second-order differential equations. First we investigate how a bit of positive feedback may be added to our repertory of linear op-amp circuit design techniques. We consider a negative impedance circuit which employs positive feedback in conjunction with negative feedback. This sort of circuit is found in a wide variety of linear op-amp applications including amplifiers, gyrators (inductance emulators), current sources, and, in particular, resonant circuits and sinusoidal oscillators. Next we switch topics to consider the archetypal resonant circuit: the LC resonator (inductor + capacitor). We use this circuit to define the resonant frequency and quality factor for a second-order system, and we investigate the frequency and transient responses of a high-Q, tuned circuit. We then introduce the general topic of second-order filters: resonant circuits with quality factors of around 1. We describe the behavior of second-order low-pass, high- pass, and band-pass filters. Finally, we implement such filters using linear op-amp circuits containing only RC combinations in their feedback networks, eliminating the need for costly and hard-to-find inductors. The filters’ circuitry will employ positive as well as negative feedback to accomplish this feat. We discuss some of the tradeoffs when selecting the Q to use in a second-order filter, and look at Bessel and Butterworth designs in particular. -

6 Ghz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2014 6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection Shuo Li Wright State University Follow this and additional works at: https://corescholar.libraries.wright.edu/etd_all Part of the Electrical and Computer Engineering Commons Repository Citation Li, Shuo, "6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection" (2014). Browse all Theses and Dissertations. 1386. https://corescholar.libraries.wright.edu/etd_all/1386 This Thesis is brought to you for free and open access by the Theses and Dissertations at CORE Scholar. It has been accepted for inclusion in Browse all Theses and Dissertations by an authorized administrator of CORE Scholar. For more information, please contact [email protected]. 6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHUO LI B.S., Dalian Jiaotong University, China, 2012 2014 WRIGHT STATE UNIVERSITY WRIGHT STATE UNIVERSITY GRADUATE SCHOOL July 1, 2013 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Shuo Li ENTITLED “6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection” BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science in Engineering ___________________________ Saiyu Ren, Ph.D. Thesis Director ___________________________ Brian D. Rigling, Ph.D. Chair, Department of Electrical Engineering Committee on Final Examination ___________________________ Saiyu Ren, Ph.D. ___________________________ Raymond Siferd, Ph.D. -
Chapter 15: Active Filter Circuits
CHAPTER 15: ACTIVE FILTER CIRCUITS 1 Contents 15.1 First-Order Low-Pass and High-Pass Filters 15.2 Scaling 15.3 Op Amp Bandpass and Bandreject Filters 15.4 High Order Op Amp Filters 15.5 Narrowband Bandpass and Bandreject Filters Electronic Circuits, Tenth Edition J ames W. Nilsson | Susan A. Riedel 2 15.1 1st-Order Low-Pass and High-Pass Filters • Active filters consist of op amps, resistors, and capacitors. • They overcome many of the disadvantages associated with passive filters. A first-order low-pass filter. A first-order low-pass filter. A general op amp circuit. • At very low frequencies, the capacitor acts like an open circuit, and the op amp circuit acts like an amplifier with a gain. • At very high frequencies, the capacitor acts like a short circuit, thereby connecting the output of the op amp circuit to ground. Electronic Circuits, Tenth Edition J ames W. Nilsson | Susan A. Riedel 3 15.1 1st-Order Low-Pass and High-Pass Filters Transfer function for the circuit 1 ‖ Where and = The gain in the passband, K, is set by the ratio R2/R1. The op amp low-pass filter thus permits the passband gain and the cutoff frequency to be specified independently. Electronic Circuits, Tenth Edition J ames W. Nilsson | Susan A. Riedel 4 15.1 1st-Order Low-Pass and High-Pass Filters • Bode plot (1) uses a logarithmic axis, instead of using a linear axis for the frequency values (2) plotted in decibels (dB), instead of plo tting the absolute magnitude of the tra nsfer function vs. -
Active Damping of Oscillations in LC-Filter for Line Connected, Current Controlled, PWM Voltage Source Converters HERNES Magnar
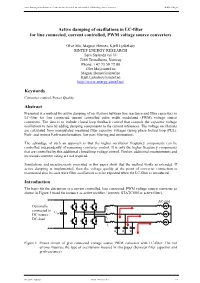
Active damping of oscillations in LC-filter for line connected, current controlled, PWM voltage source converters HERNES Magnar Active damping of oscillations in LC-filter for line connected, current controlled, PWM voltage source converters Olve Mo, Magnar Hernes, Kjell Ljøkelsøy SINTEF ENERGY RESEARCH Sem Sælands vei 11 7465 Trondheim, Norway Phone: +47 73 59 72 00 [email protected] [email protected] [email protected] http://www.energy.sintef.no/ Keywords Converter control, Power Quality Abstract Presented is a method for active damping of oscillations between line reactance and filter capacitors in LC-filter for line connected current controlled pulse width modulated (PWM) voltage source converters. The idea is to include closed loop feedback control that controls the capacitor voltage oscillations to zero by adding damping components to the current references. The voltage oscillations are calculated from manipulated measured filter capacitor voltages (using phase locked loop (PLL), Park- and inverse Park-transformation, low pass filtering and summation). The advantage of such an approach is that the higher oscillation frequency components can be controlled independently of remaining converter control. It is only the higher frequency components that are controlled by this additional closed loop voltage control. Further, additional measurements and increased converter rating are not required. Simulations and measurements presented in this paper show that the method works as intended. If active damping is implemented, then the voltage quality at the point of converter connection is maintained also in cases were filter oscillations is to be expected when the LC-filter is introduced. Introduction The basis for the discussion is a current controlled, line connected, PWM voltage source converter as shown in Figure 1 (used for instance as active rectifier / inverter, STATCOM or active filter). -

Analog Vs. Digital Filtering of Data
ECE Senior Capstone Project 2020 Tech Notes Maximum Blue Green Analog vs. Digital Filtering of Data By Sabrina Miller, ECE ‘20 _____________________________________________________ Introduction peaks of the data. However, the surrounding data is My senior design project, Smartbell, requires data noisy. Noise is characterized by meaningless data collection from an accelerometer. The data is points – the only data that are useful are the peaks intended to eventually be classified into type of above a certain threshold, as those represent sharp movement and number of reps via a machine learning fluctuations in acceleration. In order to properly algorithm. In order for proper classification, much of count the number of deadlifts performed, the smaller the noisiness must be eliminated, otherwise it may be amplitude fluctuations must be minimized. hard for the machine learning algorithm to differentiate between movements and characterize Dealing with Noise: Filters number of reps. This report aims to explore the When dealing with noisy data, there are various ways difference between analog and digital filtering of of going about filtering that data. The two data, to establish their pros and cons, and to decide on overarching categories in which one can filter data the method that best suits Smartbell. are analog filtering and digital filtering. Analog filtering involves physical hardware that alters analog The Fundamentals of Raw Data signals before they are passed off to other components to be processed. Digital filtering What is Noise? involves passing analog data to a processor that then runs code to digitally filter the data. Digital Filtering Advantages The advantages to digital filtering are numerous. -
Redacted for Privacy Leland C../Jensen
AN ABSTRACT OF THE THESIS OF CHUN-PANG CHIU for the MASTER OF SCIENCE (Name) (Degree) Electrical and in Electronics Engineering presented on /2 G (Major) (Date) Title:ACTIVE NETWORK SYNTHESIS USING GYRATORS Abstract approved:Redacted for Privacy Leland C../Jensen The. paper is a study of(i) the realization of the gyrator, (ii) active filter synthesis using gyrator. Several realization methods of the gyrator are summararized. A practical gyrator composed of two operational amplifiers was built and tested.The experimental results are shown.Two RC-gyrator synthesis techniques are derived and discussed.One method is to replace the inductors in a conventional LC filter with gyrators and capacitors.The other method is the application of Calahan's opti- mum polynomial decomposition to the synthesis procedure.The sensitivity of the two synthesis techniques are compared and dis- cussed. A practical active filter was synthesized by the second method.The experimental results are shown. Active Network Synthesis Using Gyrators by Chung-Pang Chiu A THESIS submitted to Oregon State University in partial fulfillment of the requirements for the degree of Master of Science June 1970 APPROVED: Redacted for Privacy X-4ociate Profess,,e-of Electrical and Electronics Engineering in charge of major Redacted for Privacy HO.d of Department of Electrical and Electronics Eigineering Redacted for Privacy Dead of trS.duate School Date thesis is presented Typed by Clover Redfern for Chung-Pang Chiu ACKNOWLEDGMENT The author wishes to thank Professor Leland C. Jensen who suggested the topics of this thesis and gave much assistance, instruction and encouragement during the course of this study. -

"Handbook of Operational Amplifier Active RC Networks"
Application Report SBOA093A – October 2001 Handbook Of Operational Amplifier Active RC Networks Bruce Carter and L.P. Huelsman ABSTRACT While in the process of reviewing Texas Instruments applications notes, including those from the recently acquired Burr-Brown – I uncovered a couple of treasures, this handbook on active RC networks and one on op amp applications. These old publications, from 1966 and 1963, respectively, are some of the finest works on op amp theory that I have ever seen. Nevertheless, they contain some material that is hopelessly outdated. This includes everything from the state of the art of amplifier technology, to the parts referenced in the document – even to the symbol used for the op amp itself: These numbers in the circles referred to pin numbers of old op amps, which were potted modules instead of integrated circuits. Many references to these numbers were made in the text, and these have been changed, of course. In revising this document, I chose to take a minimal approach to the material out of respect for the original author - L.P. Huelsman, leaving as much of the original material in tact as possible while making the document relevant to present day designers. I did clean up grammatical and spelling mistakes in the original. I even elected to leave the original RC stick figure illustrations, which have minimal technical content – but added to the readability of the document. 1 SBOA093A Contents CHAPTER 1.......................................................................................................................................... -
How to Compare Your Circuit Requirements to Active-Filter Approximations by Bonnie C
Analog Applications Journal Industrial How to compare your circuit requirements to active-filter approximations By Bonnie C. Baker WEBENCH® Senior Applications Engineer Figure 1. Example of a low-pass Butterworth filter R1 V+ C2_S1 16 kΩ U3 R2_S1 15 nF V+ C2_S2 OPA342 ++ 14 kΩ U1 R2_S2 15 nF V+ + OPA342 5.17 k U2 + C1 + Ω V – R1_S1 + OPA342 OUT 10 nF C1_S1 + 11.7 kΩ – R1_S2 10 nF C1_S1 Vsignal V– 4.7 kΩ 10 nF – V– V– R4_S1 R3_S1 5.36 kΩ R4_S2 2.49 kΩ R3_S2 5.36 kΩ 2.49 kΩ Introduction Figure 2. Generic frequency response Numerous filter approximations, such as Butterworth, of a low-pass filter Bessel, and Chebyshev, are available in popular filter soft- ware applications; however, it can be time consuming to Transition select the right option for your system. So how do you Passband Region Region focus in on what type of filter you need in your circuit? This article defines the differences between Bessel, Butterworth, Chebyshev, Linear Phase, and traditional RP Gaussian low-pass filters. A typical Butterworth low-pass A filter is shown in Figure 1. 3 dB Generic low-pass filter frequency and time response Figure 2 illustrates the frequency response of a generic A low-pass filter. In this diagram, the x-axis shows the SB frequency in hertz (Hz) and the y-axis shows the circuit gain in volts/volts (V/V) or decibels (dB). Magnitude The low-pass filter has two frequency areas of operation: the passband region and the transition region. In the pass- band region, the input signal passes through with minimum modifications. -
Active Filter Techniques for Reducing EMI Filter Capacitance
Active Filter Techniques for Reducing EMI Filter Capacitance by Albert C. Chow B.S., Columbia University (1999) Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements of the degree of BARKER Master of Science MASSACHUSETTS INSTI V at the OF TECHNOLOGY Massachusettes Institute of Technology JUL 3 1 2002 June 2002 LIBRAR IES © Massachusetts Institute of Technology. All Rights Reserved. Author Department of Electrical Engineering and Computer Science February 24, 2002 Certified by. 7 ,David J. Perreault Assistant Professor, Department of Electrical Engineering and Computer Science Thesis Supervisor 7< Accepted by Arthur Smith Chairman, Department Committee on Graduate Students Active Filter Techniques for Reducing EMI Filter Capacitance by Albert C. Chow Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements of the degree of Master of Science Abstract Switching power converters are widely used due to their excellent efficiency, but they inherently generate ripple. Passive low-pass LC filters have been traditionally employed to meet ripple and EMI specifications [1]. These passive filters can contribute considerably to the volume and weight of a power converter. In particular, capacitors can become relatively large in order to meet strict ripple specifications. This is detrimental to cost and reliability of these passive EMI filters. For these reasons, capacitors in EMI filters can pose a considerable design challenge. Active circuit techniques can substantially reduce passive EMI filter capacitor requirements. This thesis investigates using active circuitry to mitigate the challenges of designing with large capacitors on three fronts: reducing capacitance in EMI filters, reducing damping capacitance, and reducing capacitance cost. -
OA-26 Designing Active High Speed Filters
Application Report SNOA387C–September 1997–Revised May 2013 OA-26 Designing Active High Speed Filters ABSTRACT This application report provides a recipe to realize active filters using low cost, high speed operational amplifiers. Contents 1 Introduction .................................................................................................................. 2 2 Filter Types .................................................................................................................. 2 3 Introduction to the Second Order, Low Pass Sallen-Key Filter ....................................................... 3 4 Transform a Low Pass Filter into a High Pass Filter ................................................................... 5 5 Cascading Filter Sections .................................................................................................. 6 6 Component Value Sensitivities ............................................................................................ 7 7 Selecting an Op Amp for Use in an Active Filter ........................................................................ 7 8 Bandwidth .................................................................................................................... 7 9 Recommended Gain Range ............................................................................................... 7 10 Noise .......................................................................................................................... 8 11 Dynamic Range ............................................................................................................ -

Active Filter Circuits Active Filter Circuits
ECE307-10 Active Filter Circuits Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona Active Filter Circuits Introduction Filter circuits with RLC are passive filter circuit Use op amp to have active filter circuit Active filter can produce band-pass and band-reject filter without using inductor. Passive filter incapable of amplification. Max gain is 1 Active filter capable of amplification The cutoff frequency and band-pass magnitude of passive filter can change with additional load resistance This is not a case for active filters We look at few active filter with op amps. We look at that basic op amp filter circuits can be combined to active specific frequency response and to attain close to ideal filter response ECE 307-10 2 1 Active Filter= Circuits First-Order Low-pass Filters C Zf R2 R1 Zi - - Vi OUT Vo Vi OUT + + Vo + + −Zf 1 R2 Transfer function of the circuit Hs()= −R || − Z 2 sR C + 1 i Hs()==SC 2 RR −R ω 11 Hs()= 2 Hs()=− K c RsRC12(1)+ ()s + ωc Transfer function in jω The Gain Cutoff frequency 1 R2 1 Hj()ω =− K K = ω = ω R c RC (1+ j ) 1 2 ω ECE 307-10c 3 Active Filter Circuits Example • Find R2 and C values in the following active Low-pass filter for gain of 1 C and cutoff frequency of 1 rad/s. 1F R12 1 R1 From the gain R2 - K = = 1 RR21= =Ω1 1 R Vi OUT 1 + Vo + From the cutoff frequency 1 1 ωc = = 1 CF==1 RC2 R2 1 Hj()ω = ω (1+ j ) 1 ECE 307-10 4 2 Active Filter Circuits Example >> w=0.1:.1:10; >> h=20*log10(abs(1./(1+j*w))) ; >> semilogx(w,h) >> grid on >> xlabel('\omega(rad/s)') >> ylabel('|H(j\omega)| -

Low-Current Design of Gaas Active Inductor for Active Filters Applications
electronics Article Low-Current Design of GaAs Active Inductor for Active Filters Applications Leonardo Pantoli 1 , Vincenzo Stornelli 1,* , Giorgio Leuzzi 1, Hongjun Li 2 and Zhifu Hu 2 1 Department of Industrial and Information Engineering and Economics, University of L’Aquila, 67100 L’Aquila AQ, Italy; [email protected] (L.P.); [email protected] (G.L.) 2 Hebei Semiconductor Research Institute, Shijiazhuang 050000, China; [email protected] (H.L.) * Correspondence: [email protected] Received: 30 May 2020; Accepted: 23 July 2020; Published: 31 July 2020 Abstract: Active inductors are suitable for MMIC integration, especially for filters applications, and the definition of strategies for an efficient design of these circuits is becoming mandatory. In this work we present design considerations for the reduction of DC current in the case of an active filter design based on the use of active inductors and for high-power handling. As an example of applications, the approach is demonstrated on a two-cell, integrated active filter realized with p-HEMT technology. The filter design is based on high-Q active inductors, whose equivalent inductance and resistance can be tuned by means of varactors. The prototype was realized and tested. It operates between 1800 and 2100 MHz with a 3 dB bandwidth of 30 MHz and a rejection ratio of 30 dB at 30 MHz from the center frequency. This solution allows to obtain a P1 dB compression point of about 8 dBm and a dynamic − range of 75 dB considering a bias current of 15 mA per stage. Keywords: active filters; active inductor; MMIC; tunable filters 1.