FILTER CIRCUITS Introduction Circuits with a Response That
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Electrical Circuits Lab. 0903219 Series RC Circuit Phasor Diagram
Electrical Circuits Lab. 0903219 Series RC Circuit Phasor Diagram - Simple steps to draw phasor diagram of a series RC circuit without memorizing: * Start with the quantity (voltage or current) that is common for the resistor R and the capacitor C, which is here the source current I (because it passes through both R and C without being divided). Figure (1) Series RC circuit * Now we know that I and resistor voltage VR are in phase or have the same phase angle (there zero crossings are the same on the time axis) and VR is greater than I in magnitude. * Since I equal the capacitor current IC and we know that IC leads the capacitor voltage VC by 90 degrees, we will add VC on the phasor diagram as follows: * Now, the source voltage VS equals the vector summation of VR and VC: Figure (2) Series RC circuit Phasor Diagram Prepared by: Eng. Wiam Anabousi - Important notes on the phasor diagram of series RC circuit shown in figure (2): A- All the vectors are rotating in the same angular speed ω. B- This circuit acts as a capacitive circuit and I leads VS by a phase shift of Ө (which is the current angle if the source voltage is the reference signal). Ө ranges from 0o to 90o (0o < Ө <90o). If Ө=0o then this circuit becomes a resistive circuit and if Ө=90o then the circuit becomes a pure capacitive circuit. C- The phase shift between the source voltage and its current Ө is important and you have two ways to find its value: a- b- = - = - D- Using the phasor diagram, you can find all needed quantities in the circuit like all the voltages magnitude and phase and all the currents magnitude and phase. -

Experiment 5 Resonant Circuits and Active Filters
Introductory Electronics Laboratory Experiment 5 Resonant circuits and active filters Now we return to the realm of linear analog circuit design to consider the final op-amp circuit topic of the term: resonant circuits and active filters. Two-port networks in this category have transfer functions which are described by linear, second-order differential equations. First we investigate how a bit of positive feedback may be added to our repertory of linear op-amp circuit design techniques. We consider a negative impedance circuit which employs positive feedback in conjunction with negative feedback. This sort of circuit is found in a wide variety of linear op-amp applications including amplifiers, gyrators (inductance emulators), current sources, and, in particular, resonant circuits and sinusoidal oscillators. Next we switch topics to consider the archetypal resonant circuit: the LC resonator (inductor + capacitor). We use this circuit to define the resonant frequency and quality factor for a second-order system, and we investigate the frequency and transient responses of a high-Q, tuned circuit. We then introduce the general topic of second-order filters: resonant circuits with quality factors of around 1. We describe the behavior of second-order low-pass, high- pass, and band-pass filters. Finally, we implement such filters using linear op-amp circuits containing only RC combinations in their feedback networks, eliminating the need for costly and hard-to-find inductors. The filters’ circuitry will employ positive as well as negative feedback to accomplish this feat. We discuss some of the tradeoffs when selecting the Q to use in a second-order filter, and look at Bessel and Butterworth designs in particular. -

Lecture 3: Transfer Function and Dynamic Response Analysis
Transfer function approach Dynamic response Summary Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis Paweł Malczyk Division of Theory of Machines and Robots Institute of Aeronautics and Applied Mechanics Faculty of Power and Aeronautical Engineering Warsaw University of Technology October 17, 2019 © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 1 / 31 Transfer function approach Dynamic response Summary Outline 1 Transfer function approach 2 Dynamic response 3 Summary © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 2 / 31 Transfer function approach Dynamic response Summary Transfer function approach 1 Transfer function approach SISO system Definition Poles and zeros Transfer function for multivariable system Properties 2 Dynamic response 3 Summary © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 3 / 31 Transfer function approach Dynamic response Summary SISO system Fig. 1: Block diagram of a single input single output (SISO) system Consider the continuous, linear time-invariant (LTI) system defined by linear constant coefficient ordinary differential equation (LCCODE): dny dn−1y + − + ··· + _ + = an n an 1 n−1 a1y a0y dt dt (1) dmu dm−1u = b + b − + ··· + b u_ + b u m dtm m 1 dtm−1 1 0 initial conditions y(0), y_(0),..., y(n−1)(0), and u(0),..., u(m−1)(0) given, u(t) – input signal, y(t) – output signal, ai – real constants for i = 1, ··· , n, and bj – real constants for j = 1, ··· , m. How do I find the LCCODE (1)? . -

6 Ghz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2014 6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection Shuo Li Wright State University Follow this and additional works at: https://corescholar.libraries.wright.edu/etd_all Part of the Electrical and Computer Engineering Commons Repository Citation Li, Shuo, "6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection" (2014). Browse all Theses and Dissertations. 1386. https://corescholar.libraries.wright.edu/etd_all/1386 This Thesis is brought to you for free and open access by the Theses and Dissertations at CORE Scholar. It has been accepted for inclusion in Browse all Theses and Dissertations by an authorized administrator of CORE Scholar. For more information, please contact [email protected]. 6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHUO LI B.S., Dalian Jiaotong University, China, 2012 2014 WRIGHT STATE UNIVERSITY WRIGHT STATE UNIVERSITY GRADUATE SCHOOL July 1, 2013 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Shuo Li ENTITLED “6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection” BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science in Engineering ___________________________ Saiyu Ren, Ph.D. Thesis Director ___________________________ Brian D. Rigling, Ph.D. Chair, Department of Electrical Engineering Committee on Final Examination ___________________________ Saiyu Ren, Ph.D. ___________________________ Raymond Siferd, Ph.D. -

Control Theory
Control theory S. Simrock DESY, Hamburg, Germany Abstract In engineering and mathematics, control theory deals with the behaviour of dynamical systems. The desired output of a system is called the reference. When one or more output variables of a system need to follow a certain ref- erence over time, a controller manipulates the inputs to a system to obtain the desired effect on the output of the system. Rapid advances in digital system technology have radically altered the control design options. It has become routinely practicable to design very complicated digital controllers and to carry out the extensive calculations required for their design. These advances in im- plementation and design capability can be obtained at low cost because of the widespread availability of inexpensive and powerful digital processing plat- forms and high-speed analog IO devices. 1 Introduction The emphasis of this tutorial on control theory is on the design of digital controls to achieve good dy- namic response and small errors while using signals that are sampled in time and quantized in amplitude. Both transform (classical control) and state-space (modern control) methods are described and applied to illustrative examples. The transform methods emphasized are the root-locus method of Evans and fre- quency response. The state-space methods developed are the technique of pole assignment augmented by an estimator (observer) and optimal quadratic-loss control. The optimal control problems use the steady-state constant gain solution. Other topics covered are system identification and non-linear control. System identification is a general term to describe mathematical tools and algorithms that build dynamical models from measured data. -

Phasor Analysis of Circuits
Phasor Analysis of Circuits Concepts Frequency-domain analysis of a circuit is useful in understanding how a single-frequency wave undergoes an amplitude change and phase shift upon passage through the circuit. The concept of impedance or reactance is central to frequency-domain analysis. For a resistor, the impedance is Z ω = R , a real quantity independent of frequency. For capacitors and R ( ) inductors, the impedances are Z ω = − i ωC and Z ω = iω L. In the complex plane C ( ) L ( ) these impedances are represented as the phasors shown below. Im ivL R Re -i/vC These phasors are useful because the voltage across each circuit element is related to the current through the equation V = I Z . For a series circuit where the same current flows through each element, the voltages across each element are proportional to the impedance across that element. Phasor Analysis of the RC Circuit R V V in Z in Vout R C V ZC out The behavior of this RC circuit can be analyzed by treating it as the voltage divider shown at right. The output voltage is then V Z −i ωC out = C = . V Z Z i C R in C + R − ω + The amplitude is then V −i 1 1 out = = = , V −i +ω RC 1+ iω ω 2 in c 1+ ω ω ( c ) 1 where we have defined the corner, or 3dB, frequency as 1 ω = . c RC The phasor picture is useful to determine the phase shift and also to verify low and high frequency behavior. The input voltage is across both the resistor and the capacitor, so it is equal to the vector sum of the resistor and capacitor voltages, while the output voltage is only the voltage across capacitor. -

Step Response of Series RLC Circuit ‐ Output Taken Across Capacitor
ESE 271 / Spring 2013 / Lecture 23 Step response of series RLC circuit ‐ output taken across capacitor. What happens during transient period from initial steady state to final steady state? 1 ESE 271 / Spring 2013 / Lecture 23 Transfer function of series RLC ‐ output taken across capacitor. Poles: Case 1: ‐‐two differen t real poles Case 2: ‐ two identical real poles ‐ complex conjugate poles Case 3: 2 ESE 271 / Spring 2013 / Lecture 23 Case 1: two different real poles. Step response of series RLC ‐ output taken across capacitor. Overdamped case –the circuit demonstrates relatively slow transient response. 3 ESE 271 / Spring 2013 / Lecture 23 Case 1: two different real poles. Freqqyuency response of series RLC ‐ output taken across capacitor. Uncorrected Bode Gain Plot Overdamped case –the circuit demonstrates relatively limited bandwidth 4 ESE 271 / Spring 2013 / Lecture 23 Case 2: two identical real poles. Step response of series RLC ‐ output taken across capacitor. Critically damped case –the circuit demonstrates the shortest possible rise time without overshoot. 5 ESE 271 / Spring 2013 / Lecture 23 Case 2: two identical real poles. Freqqyuency response of series RLC ‐ output taken across capacitor. Critically damped case –the circuit demonstrates the widest bandwidth without apparent resonance. Uncorrected Bode Gain Plot 6 ESE 271 / Spring 2013 / Lecture 23 Case 3: two complex poles. Step response of series RLC ‐ output taken across capacitor. Underdamped case – the circuit oscillates. 7 ESE 271 / Spring 2013 / Lecture 23 Case 3: two complex poles. Freqqyuency response of series RLC ‐ output taken across capacitor. Corrected Bode GiGain Plot Underdamped case –the circuit can demonstrate apparent resonant behavior. -

Frequency Response and Bode Plots
1 Frequency Response and Bode Plots 1.1 Preliminaries The steady-state sinusoidal frequency-response of a circuit is described by the phasor transfer function Hj( ) . A Bode plot is a graph of the magnitude (in dB) or phase of the transfer function versus frequency. Of course we can easily program the transfer function into a computer to make such plots, and for very complicated transfer functions this may be our only recourse. But in many cases the key features of the plot can be quickly sketched by hand using some simple rules that identify the impact of the poles and zeroes in shaping the frequency response. The advantage of this approach is the insight it provides on how the circuit elements influence the frequency response. This is especially important in the design of frequency-selective circuits. We will first consider how to generate Bode plots for simple poles, and then discuss how to handle the general second-order response. Before doing this, however, it may be helpful to review some properties of transfer functions, the decibel scale, and properties of the log function. Poles, Zeroes, and Stability The s-domain transfer function is always a rational polynomial function of the form Ns() smm as12 a s m asa Hs() K K mm12 10 (1.1) nn12 n Ds() s bsnn12 b s bsb 10 As we have seen already, the polynomials in the numerator and denominator are factored to find the poles and zeroes; these are the values of s that make the numerator or denominator zero. If we write the zeroes as zz123,, zetc., and similarly write the poles as pp123,, p , then Hs( ) can be written in factored form as ()()()s zsz sz Hs() K 12 m (1.2) ()()()s psp12 sp n 1 © Bob York 2009 2 Frequency Response and Bode Plots The pole and zero locations can be real or complex. -

Linear Time Invariant Systems
UNIT III LINEAR TIME INVARIANT CONTINUOUS TIME SYSTEMS CT systems – Linear Time invariant Systems – Basic properties of continuous time systems – Linearity, Causality, Time invariance, Stability – Frequency response of LTI systems – Analysis and characterization of LTI systems using Laplace transform – Computation of impulse response and transfer function using Laplace transform – Differential equation – Impulse response – Convolution integral and Frequency response. System A system may be defined as a set of elements or functional blocks which are connected together and produces an output in response to an input signal. The response or output of the system depends upon transfer function of the system. Mathematically, the functional relationship between input and output may be written as y(t)=f[x(t)] Types of system Like signals, systems may also be of two types as under: 1. Continuous-time system 2. Discrete time system Continuous time System Continuous time system may be defined as those systems in which the associated signals are also continuous. This means that input and output of continuous – time system are both continuous time signals. For example: Audio, video amplifiers, power supplies etc., are continuous time systems. Discrete time systems Discrete time system may be defined as a system in which the associated signals are also discrete time signals. This means that in a discrete time system, the input and output are both discrete time signals. For example, microprocessors, semiconductor memories, shift registers etc., are discrete time signals. LTI system:- Systems are broadly classified as continuous time systems and discrete time systems. Continuous time systems deal with continuous time signals and discrete time systems deal with discrete time system. -

5 RC Circuits
Physics 212 Lab Lab 5 RC Circuits What You Need To Know: The Physics In the previous two labs you’ve dealt strictly with resistors. In today’s lab you’ll be using a new circuit element called a capacitor. A capacitor consists of two small metal plates that are separated by a small distance. This is evident in a capacitor’s circuit diagram symbol, see Figure 1. When a capacitor is hooked up to a circuit, charges will accumulate on the plates. Positive charge will accumulate on one plate and negative will accumulate on the other. The amount of charge that can accumulate is partially dependent upon the capacitor’s capacitance, C. With a charge distribution like this (i.e. plates of charge), a uniform electric field will be created between the plates. [You may remember this situation from the Equipotential Surfaces lab. In the lab, you had set-ups for two point-charges and two lines of charge. The latter set-up represents a capacitor.] A main function of a capacitor is to store energy. It stores its energy in the electric field between the plates. Battery Capacitor (with R charges shown) C FIGURE 1 - Battery/Capacitor FIGURE 2 - RC Circuit If you hook up a battery to a capacitor, like in Figure 1, positive charge will accumulate on the side that matches to the positive side of the battery and vice versa. When the capacitor is fully charged, the voltage across the capacitor will be equal to the voltage across the battery. You know this to be true because Kirchhoff’s Loop Law must always be true. -
ELECTRICAL CIRCUIT ANALYSIS Lecture Notes
ELECTRICAL CIRCUIT ANALYSIS Lecture Notes (2020-21) Prepared By S.RAKESH Assistant Professor, Department of EEE Department of Electrical & Electronics Engineering Malla Reddy College of Engineering & Technology Maisammaguda, Dhullapally, Secunderabad-500100 B.Tech (EEE) R-18 MALLA REDDY COLLEGE OF ENGINEERING AND TECHNOLOGY II Year B.Tech EEE-I Sem L T/P/D C 3 -/-/- 3 (R18A0206) ELECTRICAL CIRCUIT ANALYSIS COURSE OBJECTIVES: This course introduces the analysis of transients in electrical systems, to understand three phase circuits, to evaluate network parameters of given electrical network, to draw the locus diagrams and to know about the networkfunctions To prepare the students to have a basic knowledge in the analysis of ElectricNetworks UNIT-I D.C TRANSIENT ANALYSIS: Transient response of R-L, R-C, R-L-C circuits (Series and parallel combinations) for D.C. excitations, Initial conditions, Solution using differential equation and Laplace transform method. UNIT - II A.C TRANSIENT ANALYSIS: Transient response of R-L, R-C, R-L-C Series circuits for sinusoidal excitations, Initial conditions, Solution using differential equation and Laplace transform method. UNIT - III THREE PHASE CIRCUITS: Phase sequence, Star and delta connection, Relation between line and phase voltages and currents in balanced systems, Analysis of balanced and Unbalanced three phase circuits UNIT – IV LOCUS DIAGRAMS & RESONANCE: Series and Parallel combination of R-L, R-C and R-L-C circuits with variation of various parameters.Resonance for series and parallel circuits, concept of band width and Q factor. UNIT - V NETWORK PARAMETERS:Two port network parameters – Z,Y, ABCD and hybrid parameters.Condition for reciprocity and symmetry.Conversion of one parameter to other, Interconnection of Two port networks in series, parallel and cascaded configuration and image parameters. -
How to Design Analog Filter Circuits.Pdf
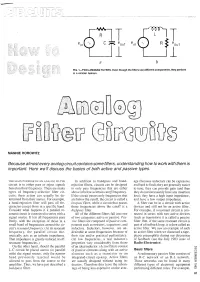
a b FIG. 1-TWO LOWPASS FILTERS. Even though the filters use different components, they perform in a similiar fashion. MANNlE HOROWITZ Because almost every analog circuit contains some filters, understandinghow to work with them is important. Here we'll discuss the basics of both active and passive types. THE MAIN PURPOSE OF AN ANALOG FILTER In addition to bandpass and band- age (because inductors can be expensive circuit is to either pass or reject signals rejection filters, circuits can be designed and hard to find); they are generally easier based on their frequency. There are many to only pass frequencies that are either to tune; they can provide gain (and thus types of frequency-selective filter cir- above or below a certain cutoff frequency. they do not necessarily have any insertion cuits; their action can usually be de- If the circuit passes only frequencies that loss); they have a high input impedance, termined from their names. For example, are below the cutoff, the circuit is called a and have a low output impedance. a band-rejection filter will pass all fre- lo~~passfilter, while a circuit that passes A filter can be in a circuit with active quencies except those in a specific band. those frequencies above the cutoff is a devices and still not be an active filter. Consider what happens if a parallel re- higlzpass filter. For example, if a resonant circuit is con- sonant circuit is connected in series with a All of the different filters fall into one . nected in series with two active devices signal source.