Redacted for Privacy Leland C../Jensen
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Experiment 5 Resonant Circuits and Active Filters
Introductory Electronics Laboratory Experiment 5 Resonant circuits and active filters Now we return to the realm of linear analog circuit design to consider the final op-amp circuit topic of the term: resonant circuits and active filters. Two-port networks in this category have transfer functions which are described by linear, second-order differential equations. First we investigate how a bit of positive feedback may be added to our repertory of linear op-amp circuit design techniques. We consider a negative impedance circuit which employs positive feedback in conjunction with negative feedback. This sort of circuit is found in a wide variety of linear op-amp applications including amplifiers, gyrators (inductance emulators), current sources, and, in particular, resonant circuits and sinusoidal oscillators. Next we switch topics to consider the archetypal resonant circuit: the LC resonator (inductor + capacitor). We use this circuit to define the resonant frequency and quality factor for a second-order system, and we investigate the frequency and transient responses of a high-Q, tuned circuit. We then introduce the general topic of second-order filters: resonant circuits with quality factors of around 1. We describe the behavior of second-order low-pass, high- pass, and band-pass filters. Finally, we implement such filters using linear op-amp circuits containing only RC combinations in their feedback networks, eliminating the need for costly and hard-to-find inductors. The filters’ circuitry will employ positive as well as negative feedback to accomplish this feat. We discuss some of the tradeoffs when selecting the Q to use in a second-order filter, and look at Bessel and Butterworth designs in particular. -

Chapter 6 Two-Port Network Model
Chapter 6 Two-Port Network Model 6.1 Introduction In this chapter a two-port network model of an actuator will be briefly described. In Chapter 5, it was shown that an automated test setup using an active system can re- create various load impedances over a limited range of frequencies. This test set-up can therefore be used to automatically reproduce any load impedance condition (related to a possible application) and apply it to a test or sample actuator. It is then possible to collect characteristic data from the test actuator such as force, velocity, current and voltage. Those characteristics can then be used to help to determine whether the tested actuator is appropriate or not for the case simulated. However versatile and easy to use this test set-up may be, because of its limitations, there is some characteristic data it will not be able to provide. For this reason and the fact that it can save a lot of measurements, having a good linear actuator model can be of great use. Developed for transduction theory [29], the linear model presented in this chapter is 77 called a Two-Port Network model. The automated test set-up remains an essential complement for this model, as it will allow the development and verification of accuracy. This chapter will focus on the two-port network model of the 1_3 tube array actuator provided by MSI (Cf: Figure 5.5). 6.2 Theory of the Two–Port Network Model As a transducer converts energy from electrical to mechanical forms, and vice- versa, it can be modelled as a Two-Port Network that relates the electrical properties at one port to the mechanical properties at the other port. -

Theory and Techniques of Network Sensitivity Applied to Electrical Device Modelling and Circuit Design
r THEORY AND TECHNIQUES OF NETWORK SENSITIVITY APPLIED TO ELECTRICAL DEVICE MODELLING AND CIRCUIT DESIGN • A thesis submitted for the degree of Doctor of Philosophy, in the Faculty of Engineering, University of London by Pedro Antonio Villalaz Communications Section, Department of Electrical Engineering Imperial College of Science and Technology, University of London September 1972 SUMMARY Chapter 1 is meant to provide a review of modelling as used in computer aided circuit design. Different types of model are distinguished according to their form or their application, and different levels of modelling are compared. Finally a scheme is described whereby models are considered as both isolated objects, and as objects embedded in their circuit environment. Chapter 2 deals with the optimization of linear equivalent circuit models. After some general considerations on the nature of the field of optimization, providing a limited survey, one particular optimization algorithm, the 'steepest descent method' is explained. A computer program has been written (in Fortran IV), using this method in an iterative process which allows to optimize the element values as well as (within certain limits) the topology of the models. Two different methods for the computation of the gradi- ent, which are employed in the program, are discussed in connection with their application. To terminate Chapter 2 some further details relevant to the optimization procedure are pointed out, and some computed examples illustrate the performance of the program. The next chapter can be regarded as a preparation for Chapters 4 and 5. An efficient method for the computation of large, change network sensitivity is described. A change in a network or equivalent circuit model element is simulated by means of an addi- tional current source introduced across that element. -
Analysis of Microwave Networks
! a b L • ! t • h ! 9/ a 9 ! a b • í { # $ C& $'' • L C& $') # * • L 9/ a 9 + ! a b • C& $' D * $' ! # * Open ended microstrip line V + , I + S Transmission line or waveguide V − , I − Port 1 Port Substrate Ground (a) (b) 9/ a 9 - ! a b • L b • Ç • ! +* C& $' C& $' C& $ ' # +* & 9/ a 9 ! a b • C& $' ! +* $' ù* # $ ' ò* # 9/ a 9 1 ! a b • C ) • L # ) # 9/ a 9 2 ! a b • { # b 9/ a 9 3 ! a b a w • L # 4!./57 #) 8 + 8 9/ a 9 9 ! a b • C& $' ! * $' # 9/ a 9 : ! a b • b L+) . 8 5 # • Ç + V = A V + BI V 1 2 2 V 1 1 I 2 = 0 V 2 = 0 V 2 I 1 = CV 2 + DI 2 I 2 9/ a 9 ; ! a b • !./5 $' C& $' { $' { $ ' [ 9/ a 9 ! a b • { • { 9/ a 9 + ! a b • [ 9/ a 9 - ! a b • C ) • #{ • L ) 9/ a 9 ! a b • í !./5 # 9/ a 9 1 ! a b • C& { +* 9/ a 9 2 ! a b • I • L 9/ a 9 3 ! a b # $ • t # ? • 5 @ 9a ? • L • ! # ) 9/ a 9 9 ! a b • { # ) 8 -

6 Ghz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2014 6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection Shuo Li Wright State University Follow this and additional works at: https://corescholar.libraries.wright.edu/etd_all Part of the Electrical and Computer Engineering Commons Repository Citation Li, Shuo, "6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection" (2014). Browse all Theses and Dissertations. 1386. https://corescholar.libraries.wright.edu/etd_all/1386 This Thesis is brought to you for free and open access by the Theses and Dissertations at CORE Scholar. It has been accepted for inclusion in Browse all Theses and Dissertations by an authorized administrator of CORE Scholar. For more information, please contact [email protected]. 6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHUO LI B.S., Dalian Jiaotong University, China, 2012 2014 WRIGHT STATE UNIVERSITY WRIGHT STATE UNIVERSITY GRADUATE SCHOOL July 1, 2013 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Shuo Li ENTITLED “6 GHz RF CMOS Active Inductor Band Pass Filter Design and Process Variation Detection” BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science in Engineering ___________________________ Saiyu Ren, Ph.D. Thesis Director ___________________________ Brian D. Rigling, Ph.D. Chair, Department of Electrical Engineering Committee on Final Examination ___________________________ Saiyu Ren, Ph.D. ___________________________ Raymond Siferd, Ph.D. -

Brief Study of Two Port Network and Its Parameters
© 2014 IJIRT | Volume 1 Issue 6 | ISSN : 2349-6002 Brief study of two port network and its parameters Rishabh Verma, Satya Prakash, Sneha Nivedita Abstract- this paper proposes the study of the various ports (of a two port network. in this case) types of parameters of two port network and different respectively. type of interconnections of two port networks. This The Z-parameter matrix for the two-port network is paper explains the parameters that are Z-, Y-, T-, T’-, probably the most common. In this case the h- and g-parameters and different types of relationship between the port currents, port voltages interconnections of two port networks. We will also discuss about their applications. and the Z-parameter matrix is given by: Index Terms- two port network, parameters, interconnections. where I. INTRODUCTION A two-port network (a kind of four-terminal network or quadripole) is an electrical network (circuit) or device with two pairs of terminals to connect to external circuits. Two For the general case of an N-port network, terminals constitute a port if the currents applied to them satisfy the essential requirement known as the port condition: the electric current entering one terminal must equal the current emerging from the The input impedance of a two-port network is given other terminal on the same port. The ports constitute by: interfaces where the network connects to other networks, the points where signals are applied or outputs are taken. In a two-port network, often port 1 where ZL is the impedance of the load connected to is considered the input port and port 2 is considered port two. -

Synthesis of Multiterminal RC Networks with the Aid of a Matrix
SNTHES IS OF MULT ITER? INAL R C ETWO RKS WITH TIIF OF A I'.'ATRIX TRANSFOiATIO by 1-CHENG CHAG A THESIS submitted to OREGO STATF COLLEOEt in partial fulfillment of the requirements for the degree of !1ASTER OF SCIENCE Jurie 1961 APPROVED: Redacted for privacy Associate Professor of' Electrical Erigineerthg In Charge of Major Re6acted for privacy Head of the Department of Electrical Engineering Redacted for privacy Chairman of School Graduate Committee / Redacted for_privacy________ Dean of Graduate School Date thesis is presented August 9, 1960 Tyred by J nette Crane A CKNOWLEDGMENT This the3ls was accomplished under the supervision cf Associate professor, Hendrick Oorthuys. The author wishos to exnress his heartfelt thanks to Professor )orthuys for his ardent help and constant encourap;oment. TABL1 OF CONTENTS page Introductior , . i E. A &eneral ranfrnat1on Theory for Network Synthesis . 3 II. Synthesis of Multitermin.. al RC etworks from a rescribec Oren- Circuit Iì'ipedance atrix . 9 A. Open-Circuit Impedance latrix . 10 B. Node-Admittance 1atries . 11 C, Synthesis Procedure ....... 16 III. RC Ladder Synthesis . 23 Iv. Conclusion ....... 32 V. ii11io;raphy ...... * . 35 Apoendices ....... 37 LIST OF FIGURES Fig. Page 1. fetwork ytheszing Zm(s). Eq. (2.13) . 22 2 Alternato Realization of Z,"'). 22 Eq. (2.13) .......... ietwor1?. , A Ladder ........ 31 4. RC Ladder Realization of Z(s). r' L) .Lq. \*)...J.......... s s . s s S1TTHES I S OF ULT ITERM INAL R C NETWORKS WITH THE AID OF A MATRIX TRANSFOMATIO11 L'TRODUCT ION in the synthesis of passive networks, one of the most Imoortant problems is to determine realizability concU- tions. -
Introduction to Transmission Lines
INTRODUCTION TO TRANSMISSION LINES DR. FARID FARAHMAND FALL 2012 http://www.empowermentresources.com/stop_cointelpro/electromagnetic_warfare.htm RF Design ¨ In RF circuits RF energy has to be transported ¤ Transmission lines ¤ Connectors ¨ As we transport energy energy gets lost ¤ Resistance of the wire à lossy cable ¤ Radiation (the energy radiates out of the wire à the wire is acting as an antenna We look at transmission lines and their characteristics Transmission Lines A transmission line connects a generator to a load – a two port network Transmission lines include (physical construction): • Two parallel wires • Coaxial cable • Microstrip line • Optical fiber • Waveguide (very high frequencies, very low loss, expensive) • etc. Types of Transmission Modes TEM (Transverse Electromagnetic): Electric and magnetic fields are orthogonal to one another, and both are orthogonal to direction of propagation Example of TEM Mode Electric Field E is radial Magnetic Field H is azimuthal Propagation is into the page Examples of Connectors Connectors include (physical construction): BNC UHF Type N Etc. Connectors and TLs must match! Transmission Line Effects Delayed by l/c At t = 0, and for f = 1 kHz , if: (1) l = 5 cm: (2) But if l = 20 km: Properties of Materials (constructive parameters) Remember: Homogenous medium is medium with constant properties ¨ Electric Permittivity ε (F/m) ¤ The higher it is, less E is induced, lower polarization ¤ For air: 8.85xE-12 F/m; ε = εo * εr ¨ Magnetic Permeability µ (H/m) Relative permittivity and permeability -
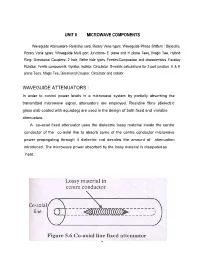
WAVEGUIDE ATTENUATORS : in Order to Control Power Levels in a Microwave System by Partially Absorbing the Transmitted Microwave Signal, Attenuators Are Employed
UNIT II MICROWAVE COMPONENTS Waveguide Attenuators- Resistive card, Rotary Vane types. Waveguide Phase Shifters : Dielectric, Rotary Vane types. Waveguide Multi port Junctions- E plane and H plane Tees, Magic Tee, Hybrid Ring. Directional Couplers- 2 hole, Bethe hole types. Ferrites-Composition and characteristics, Faraday Rotation. Ferrite components: Gyrator, Isolator, Circulator. S-matrix calculations for 2 port junction, E & H plane Tees, Magic Tee, Directional Coupler, Circulator and Isolator WAVEGUIDE ATTENUATORS : In order to control power levels in a microwave system by partially absorbing the transmitted microwave signal, attenuators are employed. Resistive films (dielectric glass slab coated with aquadag) are used in the design of both fixed and variable attenuators. A co-axial fixed attenuator uses the dielectric lossy material inside the centre conductor of the co-axial line to absorb some of the centre conductor microwave power propagating through it dielectric rod decides the amount of attenuation introduced. The microwave power absorbed by the lossy material is dissipated as heat. 1 In waveguides, the dielectric slab coated with aquadag is placed at the centre of the waveguide parallel to the maximum E-field for dominant TEIO mode. Induced current on the lossy material due to incoming microwave signal, results in power dissipation, leading to attenuation of the signal. The dielectric slab is tapered at both ends upto a length of more than half wavelength to reduce reflections as shown in figure 5.7. The dielectric slab may be made movable along the breadth of the waveguide by supporting it with two dielectric rods separated by an odd multiple of quarter guide wavelength and perpendicular to electric field. -

The Stripline Circulator Theory and Practice
The Stripline Circulator Theory and Practice By J. HELSZAJN The Stripline Circulator The Stripline Circulator Theory and Practice By J. HELSZAJN Copyright # 2008 by John Wiley & Sons, Inc. All rights reserved Published by John Wiley & Sons, Inc. Published simultaneously in Canada No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning, or otherwise, except as permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior written permission of the Publisher, or authorization through payment of the appropriate per-copy fee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax (978) 750-4470, or on the web at www.copyright.com. Requests to the Publisher for permission should be addressed to the Permissions Department, John Wiley & Sons, Inc., 111 River Street, Hoboken, NJ 07030, (201) 748-6011, fax (201) 748-6008, or online at http:// www.wiley.com/go/permission. Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their best efforts in preparing this book, they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose. No warranty may be created or extended by sales representatives or written sales materials. The advice and strategies contained herein may not be suitable for your situation. You should consult with a professional where appropriate. Neither the publisher nor author shall be liable for any loss of profit or any other commercial damages, including but not limited to special, incidental, consequential, or other damages. -

Multi-Pole Bandwidth Enhancement Technique for Transimpedance
Multi-Pole Bandwidth Enhancement Technique for Transimpedance Amplifiers Behnam Analui and Ali Hajimiri California Institute of Technology, Pasadena, CA 91125 USA Email: [email protected] Abstract quencies. Capacitive peaking [3] is a variation of the A new technique for bandwidth enhancement of ampli- same idea that can improve the bandwidth. fiers is developed. Adding several passive networks, A more exotic approach to solving the problem was which can be designed independently, enables the control proposed by Ginzton et al using distributed amplification of transfer function and frequency response behavior. [4]. Here, the gain stages are separated with transmission Parasitic capacitances of cascaded gain stages are iso- lines. Although the gain contributions of the several lated from each other and absorbed into passive net- stages are added together, the parasitic capacitors can be works. A simplified design procedure, using well-known absorbed into the transmission lines contributing to its filter component values is introduced. To demonstrate the real part of the characteristic impedance. Ideally, the feasibility of the method, a CMOS transimpedance ampli- number of stages can be increased indefinitely, achieving fier is implemented in 0.18mm BiCMOS technology. It an unlimited gain bandwidth product. In practice, this achieves 9.2GHz bandwidth in the presence of 0.5pF will be limited to the loss of the transmission line. Hence, photo diode capacitance and a trans-resistance gain of the design of distributed amplifiers requires careful elec- 0.6kW, while drawing 55mA from a 2.5V supply. tromagnetic simulations and very accurate modeling of transistor parasitics. Recently, a CMOS distributed 1. Introduction amplifier was presented [7] with unity-gain bandwidth of The ever-growing demand for higher information trans- 5.5 GHz. -

Doppler-Based Acoustic Gyrator
applied sciences Article Doppler-Based Acoustic Gyrator Farzad Zangeneh-Nejad and Romain Fleury * ID Laboratory of Wave Engineering, École Polytechnique Fédérale de Lausanne (EPFL), 1015 Lausanne, Switzerland; farzad.zangenehnejad@epfl.ch * Correspondence: romain.fleury@epfl.ch; Tel.: +41-412-1693-5688 Received: 30 May 2018; Accepted: 2 July 2018; Published: 3 July 2018 Abstract: Non-reciprocal phase shifters have been attracting a great deal of attention due to their important applications in filtering, isolation, modulation, and mode locking. Here, we demonstrate a non-reciprocal acoustic phase shifter using a simple acoustic waveguide. We show, both analytically and numerically, that when the fluid within the waveguide is biased by a time-independent velocity, the sound waves travelling in forward and backward directions experience different amounts of phase shifts. We further show that the differential phase shift between the forward and backward waves can be conveniently adjusted by changing the imparted bias velocity. Setting the corresponding differential phase shift to 180 degrees, we then realize an acoustic gyrator, which is of paramount importance not only for the network realization of two port components, but also as the building block for the construction of different non-reciprocal devices like isolators and circulators. Keywords: non-reciprocal acoustics; gyrators; phase shifters; Doppler effect 1. Introduction Microwave phase shifters are two-port components that provide an arbitrary and variable transmission phase angle with low insertion loss [1–3]. Since their discovery in the 19th century, such phase shifters have found important applications in devices such as phased array antennas and receivers [4,5], beam forming and steering networks [6,7], measurement and testing systems [8,9], filters [10,11], modulators [12,13], frequency up-convertors [14], power flow controllers [15], interferometers [16], and mode lockers [17].