Intelligent Vehicle Power Control Based on Machine Learning Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Smart Contracts for Machine-To-Machine Communication: Possibilities and Limitations
Smart Contracts for Machine-to-Machine Communication: Possibilities and Limitations Yuichi Hanada Luke Hsiao Philip Levis Stanford University Stanford University Stanford University [email protected] [email protected] [email protected] Abstract—Blockchain technologies, such as smart contracts, present a unique interface for machine-to-machine communication that provides a secure, append-only record that can be shared without trust and without a central administrator. We study the possibilities and limitations of using smart contracts for machine-to-machine communication by designing, implementing, and evaluating AGasP, an application for automated gasoline purchases. We find that using smart contracts allows us to directly address the challenges of transparency, longevity, and Figure 1. A traditional IoT application that stores a user’s credit card trust in IoT applications. However, real-world applications using information and is installed in a smart vehicle and smart gasoline pump. smart contracts must address their important trade-offs, such Before refueling, the vehicle and pump communicate directly using short-range as performance, privacy, and the challenge of ensuring they are wireless communication, such as Bluetooth, to identify the vehicle and pump written correctly. involved in the transaction. Then, the credit card stored by the cloud service Index Terms—Internet of Things, IoT, Machine-to-Machine is charged after the user refuels. Note that each piece of the application is Communication, Blockchain, Smart Contracts, Ethereum controlled by a single entity. I. INTRODUCTION centralized entity manages application state and communication protocols—they cannot function without the cloud services of The Internet of Things (IoT) refers broadly to interconnected their vendors [11], [12]. -

Microscope Systems and Their Application in Machine Vision
Microscope Systems And Their Application in Machine Vision 1 1 Agenda • What is a microscope system? • Basic setup of a microscope • Differences to standard lenses • Parameters of microscope systems • Illumination options in a microscope setup • Special contrast enhancement techniques • Zoom components • Real-world examples What is a microscope systems? Greek: μικρός mikrós „small“; σκοπεῖν skopeín „observe“ Microscopes help us to look at small things, by enlarging them until we can see them with bare eyes or an image sensor. A microscope system is a system that consists of compatible components which can be combined into different configurations We only look at visible light microscopes We only look at digial microscopes no eyepiece but an image sensor in the object plane The optical magnification is ≥1 Basic setup of a microscope microscopes always show the same basic configuration: Sensor Tube lens: - Images onto the sensor - Defines the maximum sensor size Collimated beam path (infinity conjugated) Objective: - Images to infinity - Holds the system aperture - Defines the resolution of the system Object Differences to standard lenses microscope Finite-finite lens Sensor Sensor Collimated beam path (infinity conjugate) EnthältSystem apertureSystemblende Object Object Differences to standard lenses • Collimated beam path offers several options - Distance between objective and tube lens can be changed . Focusing by moving the objective without changing any optical parameter . Integration of filters, mirrors and beam splitters . Beam -

Second Machine Age Or Fifth Technological Revolution? Different
Second Machine Age or Fifth Technological Revolution? Different interpretations lead to different recommendations – Reflections on Erik Brynjolfsson and Andrew McAfee’s book The Second Machine Age (2014). Part 1 Introduction: the pitfalls of historical periodization Carlota Perez January 2017 Blog post: http://beyondthetechrevolution.com/blog/second-machine-age-or-fifth-technological- revolution/ This is the first instalment in a series of posts (and a Working Paper in progress) that reflect on aspects of Erik Brynjolfsson and Andrew McAfee’s influential book, The Second Machine Age (2014), in order to examine how different historical understandings of technological revolutions can influence policy recommendations in the present. Over the next few weeks, we will discuss the various criteria used for identifying a technological revolution, the nature of the current moment, and the different implications that stem from taking either the ‘machine ages’ or my ‘great surges’ point of view. We will look at what we see as the virtues and limits of Brynjolfsson and McAfee’s policy proposals, and why implementing policies appropriate to the stage of development of any technological revolution have been crucial to unleashing ‘Golden Ages’ in the past. 1 Introduction: the pitfalls of historical periodization Information technology has been such an obvious disrupter and game changer across our societies and economies that the past few years have seen a great revival of the notion of ‘technological revolutions’. Preparing for the next industrial revolution was the theme of the World Economic Forum at Davos in 2016; the European Union (EU) has strategies in place to cope with the changes that the current ‘revolution’ is bringing. -

The History of Computing in the History of Technology
The History of Computing in the History of Technology Michael S. Mahoney Program in History of Science Princeton University, Princeton, NJ (Annals of the History of Computing 10(1988), 113-125) After surveying the current state of the literature in the history of computing, this paper discusses some of the major issues addressed by recent work in the history of technology. It suggests aspects of the development of computing which are pertinent to those issues and hence for which that recent work could provide models of historical analysis. As a new scientific technology with unique features, computing in turn can provide new perspectives on the history of technology. Introduction record-keeping by a new industry of data processing. As a primary vehicle of Since World War II 'information' has emerged communication over both space and t ime, it as a fundamental scientific and technological has come to form the core of modern concept applied to phenomena ranging from information technolo gy. What the black holes to DNA, from the organization of English-speaking world refers to as "computer cells to the processes of human thought, and science" is known to the rest of western from the management of corporations to the Europe as informatique (or Informatik or allocation of global resources. In addition to informatica). Much of the concern over reshaping established disciplines, it has information as a commodity and as a natural stimulated the formation of a panoply of new resource derives from the computer and from subjects and areas of inquiry concerned with computer-based communications technolo gy. -

Reverse Engineering Integrated Circuits Using Finite State Machine Analysis
Proceedings of the 50th Hawaii International Conference on System Sciences | 2017 Reverse Engineering Integrated Circuits Using Finite State Machine Analysis Jessica Smithy, Kiri Oler∗, Carl Miller∗, David Manz∗ ∗Pacific Northwest National Laboratory Email: fi[email protected] yWashington State University Email: [email protected] Abstract are expensive and time consumptive but extremely accurate. Due to the lack of a secure supply chain, it is not possible Alternatively, there are a variety of non-destructive imaging to fully trust the integrity of electronic devices. Current methods for determining if an unknown IC is different from methods of verifying integrated circuits are either destruc- an ’assumed-good’ benchmark IC. However, these methods tive or non-specific. Here we expand upon prior work, in often only work for large or active differences, and are which we proposed a novel method of reverse engineering based on the assumption that the benchmark chip has not the finite state machines that integrated circuits are built been corrupted. What is needed, and what we will detail upon in a non-destructive and highly specific manner. In in the following sections, is an algorithm to enable a fast, this paper, we present a methodology for reverse engineering non-destructive method of reverse engineering ICs to ensure integrated circuits, including a mathematical verification of their veracity. We must assume the worst case scenario in a scalable algorithm used to generate minimal finite state which we have no prior knowledge, no design documents, machine representations of integrated circuits. no labeling, or an out-of-production IC. The mathematical theory behind our approach is pre- 1. -

ERC Machine Shop Operational Policy
College of Engineering --- Colorado State University Machine Shop Operational Policy Engineering Research Center November 2011 Table of Contents 1.0 Introduction and Context ................................................................................................................... - 1 - 1.1 Purpose ........................................................................................................................................... - 1 - 1.2 Introduction .................................................................................................................................... - 1 - 1.3 Contact Information ....................................................................................................................... - 1 - 2.0 Safety: Rules, Procedures and Guidelines ......................................................................................... - 1 - 2.1 General Shop Safety Rules and Conduct: ...................................................................................... - 1 - 2.2 Personal Protective Equipment (Eyes, Ears, Respiration, Body, Hands) ...................................... - 3 - 2.2.1. Protective Clothing ................................................................................................................. - 3 - 2.2.2 Eye Protection ......................................................................................................................... - 3 - 2.2.3 Protective Gloves ................................................................................................................... -

The Impact of the Technological Revolution on Labour Markets and Income Distribution
Department of Economic & Social Affairs FRONTIER ISSUES 31 JULY 2017 The impact of the technological revolution on labour markets and income distribution CONTENTS Executive Summary .................................................... 1 1. Introduction ....................................................... 3 2. A new technological revolution? ....................................... 4 A. Technological progress and revolutions ............................. 4 B. Economic potential of the new technological breakthroughs ............. 7 3. Long term and recent trends .......................................... 8 A. Productivity trends .............................................. 8 B. Sectoral employment shifts and work conditions ..................... 11 C. Income inequality .............................................. 14 4. How does technological innovation affect labour markets and inequality? ..... 17 A. Job destruction and job creation ................................. 17 B. Occupational shifts, job polarization and wage inequality .............. 20 C. Technology and globalization .................................... 21 D. Technology and market structures. .22 E. Technology and the organization of work ........................... 23 F. Technology and the informal sector ............................... 23 G. Technology and female labour force participation .................... 24 5. Looking ahead: What will technology mean for labour and inequality? ........ 26 A. The future of technological progress ............................... 26 -
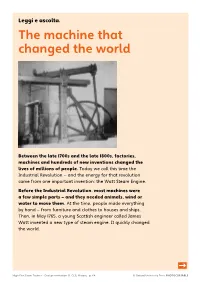
The Machine That Changed the World
Leggi e ascolta. The machine that changed the world Between the late 1700s and the late 1800s, factories, machines and hundreds of new inventions changed the lives of millions of people. Today we call this time the Industrial Revolution – and the energy for that revolution came from one important invention: the Watt Steam Engine. Before the Industrial Revolution, most machines were a few simple parts – and they needed animals, wind or water to move them. At the time, people made everything by hand – from furniture and clothes to houses and ships. Then, in May 1765, a young Scottish engineer called James Watt invented a new type of steam engine. It quickly changed the world. High Five Exam Trainer . Oral presentation 13, CLIL History p. 64 © Oxford University Press PHOTOCOPIABLE A steam engine burns coal to heat water and to change it into steam. Then the hot steam moves the parts of the engine. Watt’s Steam Engine was much more efficient than the first steam engines – it used less coal and it could produce enough energy to move big, heavy machines. It could also work faster, and it could turn a wheel. This was important because people could use it to move the parts of machines in factories. Soon, new factories appeared all over Britain. At the same time, people invented new factory machines to make lots of different products. These factories needed new workers, so millions of people left their villages and went to work in the towns. Some factory towns quickly developed into big cities. Other engineers later changed the design of Watt’s Steam Engine. -

TECHNOLOGY RESOURCES (Resources Are Things We Need to Get a Job Done) Steve Krar Resources Are Things We Need to Get a Job Done
1 TECHNOLOGY RESOURCES (Resources are Things we Need to get a Job Done) Steve Krar Resources are things we need to get a job done. Every technological system makes use of seven types of resources: people, information, materials, tools and machines, energy, capital, and time. People Technology comes from the needs of people and people's needs drive technology. Humans use what they know, try to learn more, design and create technology using their knowledge and intelligence. NASA scientists had to combine their knowledge with new ideas to come up with a space vehicle and a way to get it to the moon and back safely. People provide the labor on which technology depends, they are needed to provide the products and services we use every day. People are also the consumers of technology and the ones that buy consumer goods produced such as food, cars, homes, etc. Information Technology requires information to solve problems and to create new knowledge. Information comes from raw data, that is processed by collecting, recording, classifying, calculating, storing, and retrieving it. Information can be found in many places: in computer files, books, etc., but it is only valuable when we make use of it. We process information by collecting it, thinking about it, and applying it to meet our needs and wants. Materials Natural resources found in nature are called raw materials. These include air, water, land, timber, minerals, plants, and animals. Synthetic materials are manufactured materials that may have useful characteristics natural materials do not have. Raw Materials There are two types of raw materials available for humans to use: 1. -

Eras of Technological Convergence: Machine Tools and Mechanization in the United States
Eras of Technological Convergence: Machine Tools and Mechanization in the United States, 1820-1929 Ross Thomson University of Vermont Prepared for the Economic History Association meetings, September 2010 Abstract: Following up on the seminal insights of Nathan Rosenberg, this paper explores how, and how widely, technology converged among U.S. machine-tool using industries from 1815 through 1930. Convergence involved the invention and spread of machine tools, and both occurred in a variety of ways. Through the study of Brown and Sharpe company records, census data, and patenting by metalworking lathe inventors and machine tool firms, I argue that machine tools evolved through three stages of progressively wider convergence and different organizational forms. Through 1865, firms often made their own machine tools and used inventions in their own firms. Convergence was narrow, occurring through diversification by machinery firms, incipient sale of general purpose machine tools, and some worker mobility. From 1865 through the 1890s, machine tool firms became more central to the invention and dissemination of machine tools among industries. Widening mobility and new firm formation by workers trained by machine tool firms, along with some diversification, added to the convergence. After 1900, machine tool firms and their workers remained central to invention and diffusion for established industries and autos and other new sectors. But major innovations also emerged and spread from new sources making complements to machine tools, notably the steel and electrical industries, so that materials science and electrification had come to contribute to metalworking industries. Eras of Technological Convergence: Machine Tools and Mechanization in the United States, 1820-1929 The United States was widely recognized for its breadth of mechanization, a breadth that by the 1920s led the world in autos, electrical equipment, and machines to reap, mine, print, spin, sew, type, and make machines. -

A Brief History of IT
IT Computer Technical Support Newsletter A Brief History of IT May 23, 2016 Vol.2, No.29 TABLE OF CONTENTS Introduction........................1 Pre-mechanical..................2 Mechanical.........................3 Electro-mechanical............4 Electronic...........................5 Age of Information.............6 Since the dawn of modern computers, the rapid digitization and growth in the amount of data created, shared, and consumed has transformed society greatly. In a world that is interconnected, change happens at a startling pace. Have you ever wondered how this connected world of ours got connected in the first place? The IT Computer Technical Support 1 Newsletter is complements of Pejman Kamkarian nformation technology has been around for a long, long time. Basically as Ilong as people have been around! Humans have always been quick to adapt technologies for better and faster communication. There are 4 main ages that divide up the history of information technology but only the latest age (electronic) and some of the electromechanical age really affects us today. 1. Pre-Mechanical The earliest age of technology. It can be defined as the time between 3000 B.C. and 1450 A.D. When humans first started communicating, they would try to use language to make simple pictures – petroglyphs to tell a story, map their terrain, or keep accounts such as how many animals one owned, etc. Petroglyph in Utah This trend continued with the advent of formal language and better media such as rags, papyrus, and eventually paper. The first ever calculator – the abacus was invented in this period after the development of numbering systems. 2 | IT Computer Technical Support Newsletter 2. -

Advanced Manufacturing Machine Technology CERTIFICATE
Advanced Manufacturing Machine Technology CERTIFICATE CONSIDER MANUFACTURING The Southwestern Connecticut Advanced Manufacturing Technology Center, established at • Do you enjoy working with tools and computers? Housatonic Community College in 2012, is part of • Do you like working with your hands as well as your mind? a statewide initiative to provide skilled employees • Are you curious about the way things work and how they for the growing manufacturing industry. are made? • Do you possess the ability to focus on precision and quality? From research and development, to • Are you interested in learning advanced technologies manufacturing, to maintenance and repair, skilled with the latest software and equipment? machinists are in great demand. Machinists • Are you curious about manufacturing careers in the aerospace, now use sophisticated manual and computer biomedical, plastics & composites or metals sectors? numerically controlled (CNC) machine tools, precision instruments, and state-of-the-art If the answer to any of these questions is yes, the Advanced software to produce tools and parts for a wide Manufacturing Machine Technology program may be for you. range of industries. Current labor statistics indicate dramatic “Manufacturers in Fairfield and New Haven counties shortages of skilled workers and anticipated have been asking for a program that will provide skilled growth (not including attrition projections) of workers capable of meeting our employment needs. We 3000 Connecticut jobs per year through 2030. stand ready to support and hire HCC graduates who can According to CCSU labor statistics, average make the grade.” starting salaries are above $42,000, with Kris Lorch, President - Alloy Engineering projections including overtime and fringe benefits New Haven Manufacturers Association (health insurance, 401k plans etc.) after five years Manufacturer’s Training and Education Alliance (METAL) approaching $70,000.