Slide-In Electric Road System Inductive Project Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Hongkong and Shanghai Banking Corporation Branch Location
The Hongkong and Shanghai Banking Corporation Bank Branch Address 1. Causeway Bay Branch Basement 1 and Shop G08, G/F, Causeway Bay Plaza 2, 463-483 Lockhart Road, Causeway Bay, Hong Kong 2. Happy Valley Branch G/F, Sun & Moon Building, 45 Sing Woo Road, Happy Valley, Hong Kong 3. Hopewell Centre Branch Shop 2A, 2/F, Hopewell Centre, 183 Queen's Road East, Wan Chai, Hong Kong 4. Park Lane Branch Shops 1.09 - 1.10, 1/F, Style House, Park Lane Hotel, 310 Gloucester Road, Causeway Bay, Hong Kong 5. Sun Hung Kai Centre Shops 115-117 & 127-133, 1/F, Sun Hung Kai Centre, Branch 30 Harbour Road, Wan Chai, Hong Kong 6. Central Branch Basement, 29 Queen's Road Central, Central, Hong Kong 7. Exchange Square Branch Shop 102, 1/F, Exchange Square Podium, Central, Hong Kong 8. Hay Wah Building Hay Wah Building, 71-85 Hennessy Road, Wan Chai, Branch Hong Kong 9. Hong Kong Office Level 3, 1 Queen's Road Central, Central, Hong Kong 10. Chai Wan Branch Shop No. 1-11, Block B, G/F, Walton Estate, Chai Wan, Hong Kong 11. Cityplaza Branch Unit 065, Cityplaza I, Taikoo Shing, Quarry Bay, Hong Kong 12. Electric Road Branch Shop A2, Block A, Sea View Estate, Watson Road, North Point, Hong Kong 13. Island Place Branch Shop 131 - 132, Island Place, 500 King's Road, North Point, Hong Kong 14. North Point Branch G/F, Winner House, 306-316 King's Road, North Point, Hong Kong 15. Quarry Bay Branch* G/F- 1/F, 971 King's Road, Quarry Bay, Hong Kong 16. -

Designated 7-11 Convenience Stores
Store # Area Region in Eng Address in Eng 0001 HK Happy Valley G/F., Winner House,15 Wong Nei Chung Road, Happy Valley, HK 0009 HK Quarry Bay Shop 12-13, G/F., Blk C, Model Housing Est., 774 King's Road, HK 0028 KLN Mongkok G/F., Comfort Court, 19 Playing Field Rd., Kln 0036 KLN Jordan Shop A, G/F, TAL Building, 45-53 Austin Road, Kln 0077 KLN Kowloon City Shop A-D, G/F., Leung Ling House, 96 Nga Tsin Wai Rd, Kowloon City, Kln 0084 HK Wan Chai G6, G/F, Harbour Centre, 25 Harbour Rd., Wanchai, HK 0085 HK Sheung Wan G/F., Blk B, Hiller Comm Bldg., 89-91 Wing Lok St., HK 0094 HK Causeway Bay Shop 3, G/F, Professional Bldg., 19-23 Tung Lo Wan Road, HK 0102 KLN Jordan G/F, 11 Nanking Street, Kln 0119 KLN Jordan G/F, 48-50 Bowring Street, Kln 0132 KLN Mongkok Shop 16, G/F., 60-104 Soy Street, Concord Bldg., Kln 0150 HK Sheung Wan G01 Shun Tak Centre, 200 Connaught Rd C, HK-Macau Ferry Terminal, HK 0151 HK Wan Chai Shop 2, 20 Luard Road, Wanchai, HK 0153 HK Sheung Wan G/F., 88 High Street, HK 0226 KLN Jordan Shop A, G/F, Cheung King Mansion, 144 Austin Road, Kln 0253 KLN Tsim Sha Tsui East Shop 1, Lower G/F, Hilton Tower, 96 Granville Road, Tsimshatsui East, Kln 0273 HK Central G/F, 89 Caine Road, HK 0281 HK Wan Chai Shop A, G/F, 151 Lockhart Road, Wanchai, HK 0308 KLN Tsim Sha Tsui Shop 1 & 2, G/F, Hart Avenue Plaza, 5-9A Hart Avenue, TST, Kln 0323 HK Wan Chai Portion of shop A, B & C, G/F Sun Tao Bldg, 12-18 Morrison Hill Rd, HK 0325 HK Causeway Bay Shop C, G/F Pak Shing Bldg, 168-174 Tung Lo Wan Rd, Causeway Bay, HK 0327 KLN Tsim Sha Tsui Shop 7, G/F Star House, 3 Salisbury Road, TST, Kln 0328 HK Wan Chai Shop C, G/F, Siu Fung Building, 9-17 Tin Lok Lane, Wanchai, HK 0339 KLN Kowloon Bay G/F, Shop No.205-207, Phase II Amoy Plaza, 77 Ngau Tau Kok Road, Kln 0351 KLN Kwun Tong Shop 22, 23 & 23A, G/F, Laguna Plaza, Cha Kwo Ling Rd., Kwun Tong, Kln. -

Electric Vehicle
Electric vehicle An electric vehicle (EV), also referred to as an electric drive vehicle, uses one or more electric motors or traction motors for propulsion. An electric vehicle may be pow- ered through a collector system by electricity from off- vehicle sources, or may be self-contained with a battery or generator to convert fuel to electricity.[1] EVs include road and rail vehicles, surface and underwater vessels, electric aircraft and electric spacecraft. EVs first came into existence in the mid-19th century, when electricity was among the preferred methods for motor vehicle propulsion, providing a level of comfort An EV and an antique car on display at a 1912 auto show and ease of operation that could not be achieved by the gasoline cars of the time. The internal combustion en- gine (ICE) has been the dominant propulsion method for Around the same period, early experimental electrical motor vehicles for almost 100 years, but electric power cars were moving on rails, too. American blacksmith and has remained commonplace in other vehicle types, such inventor Thomas Davenport built a toy electric locomo- as trains and smaller vehicles of all types. tive, powered by a primitive electric motor, in 1835. In 1838, a Scotsman named Robert Davidson built an elec- tric locomotive that attained a speed of four miles per 1 History hour (6 km/h). In England a patent was granted in 1840 for the use of rails as conductors of electric current, and Main article: History of the electric vehicle similar American patents were issued to Lilley and Colten Electric motive power started in 1827, when Slovak- in 1847.[3] Between 1832 and 1839 (the exact year is uncertain), Robert Anderson of Scotland invented the first crude electric carriage, powered by non-rechargeable primary cells.[4] By the 20th century, electric cars and rail transport were commonplace, with commercial electric automo- biles having the majority of the market. -

COMING in EARLY 2020 Hotel Lobby About Us
COMING IN EARLY 2020 Hotel Lobby About Us Hotel Alexandra is a design-led hotel situated at the heart of Hong Kong Island on the North Point waterfront, exquisitely designed melding timeless Victorian elegance and modern concepts. Newly built and scheduled to open its doors in early 2020, the hotel is the newest addition to the line of established hotels managed by Harbour Plaza Hotels & Resorts. Offers cosy guest rooms and suites, enchanting outlets, fitness centre, outdoor swimming pool, versatile function facilities such as a grand ballroom and customizable function spaces. Hotel Foyer & Lobby Bright and uplifting space, featuring grand chandeliers, floor to ceiling windows and doors, Victorian tiled flooring and expansive mirrors. Adorned by the warmth of rich gold, elegant black and hints of red. Design-led Inspired by Victorian decadence, silks and velvets, grand chandeliers, engraved golden doors and fixtures, evocative of Alice's Adventures in Wonderland. Hotel Floyer Weddings & Events Grand Ballroom • Stunning ballroom to host medium to large-scale celebrations, weddings, private parties, cocktail functions and meetings. Measuring an expansive 935 m² and featuring 4 m ceiling height • Configurable into 3 venues for more intimate gatherings • A pre-function space measuring 275 m² Meeting Venues • 6 function spaces suitable for intimate to medium sized social gatherings, business meetings or private celebrations • Up to 60 m² and up to 2.3 m ceiling 21 ft. 20 ft. 31 ft. Meeting Room I I II III 48 ft. 22 ft. 40 ft. 57 ft. 50 ft. -

Electric Road Systems a Feasibility Study Investigating a Possible Future of Road Transportation
Electric Road Systems A feasibility study investigating a possible future of road transportation Archit Singh Master of Science Thesis EGI_2016-090 MSC KTH Sustainable Energy Engineering Energy and Environment SE-100 44 STOCKHOLM Master of Science Thesis EGI_2016-090 MSC Electric Road Systems A feasibility study investigating a possible future of road transportation Archit Singh Approved Examiner Supervisor 2016-10-10 Hatef Madani Björn Hasselgren Company Supervisor Contact person Gunnar Asplund Björn Hasselgren Abstract The transportation sector is a vital part of today’s society and accounts for 20 % of our global total energy consumption. It is also one of the most greenhouse gas emission intensive sectors as almost 95 % of its energy originates from petroleum-based fuels. Due to the possible harmful nature of greenhouse gases, there is a need for a transition to more sustainable transportation alternatives. A possible alternative to the conventional petroleum-based road transportation is implementation of Electric Road Systems (ERS) in combination with electric vehicles (EVs). ERS are systems that enable dynamic power transfer to the EV's from the roads they are driving on. Consequently, by utilizing ERS in combination with EVs, both the cost and weight of the EV-batteries can be kept to a minimum and the requirement for stops for recharging can also be eliminated. This system further enables heavy vehicles to utilize battery solutions. There are currently in principal three proven ERS technologies, namely, conductive power transfer through overhead lines, conductive power transfer from rails in the road and inductive power transfer through the road. The aim of this report is to evaluate and compare the potential of a full- scale implementation of these ERS technologies on a global and local (Sweden) level from predominantly, an economic and environmental perspective. -

Shop 123, 1St Floor, Peninsula Centre, 67 Mody Road, Tsim Sha Tsui East, Kowloon
NO NAME ADDRESS TELP FAX 1 A Maids Employment Services Centre Shop 123, 1st Floor, Peninsula Centre, 67 Mody Road, Tsim Sha Tsui East, Kowloon. 2111 3319 3102 9909 2 A.V.M.S Limited Shop L115, 1st floor, Metro Harbour Plaza, Tai Kok Tsui, Kowloon 3144 3367 3144 3962 3 Abadi Employment Consultant Centre Room 1108, 1st floor, Inciti Kar Shing Building, 15-19 Kau Yuk Road, Yuen Long, New Territories 3106 5716 3106 5717 4 ABNC Employment Agencies Co. Flat 79, Ground floor, Maximall, Blocks 1-3, City Garden, 233 Electric Road, North Point, Hong Kong. 25762911 25763600 5 Active Global Specialised Caregivers (HK) Pte Ltd. Unit 1703-04, 17th floor, Lucky Centre, 165-171 Wan Chai Road, Wan Chai, Hong Kong 3426 2909 3013 9815 6 Advance Court Overseas Employment Co. Shop 34B, Level 2, Waldorf Shopping Centre, Castle Peak Road, TMTL 194, Tuen Mun, New Territories 2458 1573 2452 6735 7 Advantage Consultant Co. Flat C, 12th FIoor, Kam Wah Building, 516 Nathan Road, Yau Ma Tei, Kowlon 26012708 27711420 8 AIE Employment Centre Room 1605, 16th floor, Hollywood Plaza, 610 Nathan Road, Mong Kok, Kowloon 2770 1198 2388 9057 9 Alim Prima Employment Agency Room K & L, 4th floor, Hennessy Apartments, 488 Hennessy Road, Causeway Bay, Hong Kong 25040629 27709803 10 All The Best Employment Limited. 1st floor, 92 Kam Tin Road, Yuen Long, New Territories 2807 0870 2807 0869 11 Allwin Employment Centre Limited Mezzanine floor, 408 Ma Tau Wau Road, Hung Hom, Kowloon 28668585 28669595 12 An Apple Travel & Employment Services Limited Room 907, 9th floor, Tower 2, Silvercord, -

Guide: Electrification- Planning for Electric Road Transport in the SUMP Context
TOPIC GUIDE: ELECTRIFICATION Planning for electric road transport in the SUMP context Imprint About: This Topic Guide has been developed within the framework of the SUMPs-Up project, funded under the European Union’s Horizon 2020 Research and Innovation programme under Grant Agreement no. 690669 Citation: Polis, and Rupprecht Consult - Forschung & Beratung GmbH (eds). 2019. Topic Guide: Electrification- planning for electric road transport in the SUMP context. Authors: Thomas Mourey, Polis; Henning Günter, Wolfgang Backhaus, Rupprecht Consult Contributers: Ivo Cre, Sergio Fernández Balaguer, Michael Glotz-Richter, Geir Rossebø, Lucy Sadler, Jillian van der Gaag Reviewers: Zlatko Kregar, Piotr Rapacz, Fabio Tomasi, Isabelle Vandoorne, Alexander Verduyn, Axel Volkery, Reggie Tricker Acknowledgement: This publication is made possible thanks to the contributions made by organisations involved in the SUMPs-Up project, all of whom are credited for their respective contributions. Disclaimer: The views expressed in this publication are the sole responsibility of the authors named and do not necessarily reflect the views of the European Commission. Copyright: This publication is the copyright of Polis and Rupprecht Consult - Forschung & Beratung GmbH. All images and text elements in this publication, for which a source is provided, are the property of the organisations or individuals credited. The authors would like to encourage the widespread use of this Topic Guide. This document may be used free of charge, copied and redistributed via any medium, provided that (a) the source is acknowledged (by using the citation above) and (b) the use of the redistributed material is free of charge. Commercial use of this document as well as modifications to its content is authorised only with the express permission of the copyright holders. -

Consumption Voucher Scheme-Locations with Drop-Box
Consumption Voucher Scheme Locations with drop-box for collection of paper registration forms The Hongkong and Shanghai Banking Corporation Number Location Bank Branch Branch Address 1 HK Causeway Bay Branch Basement 1 and Shop G08, G/F, Causeway Bay Plaza 2, 463-483 Lockhart Road, Causeway Bay, Hong Kong 2 HK Happy Valley Branch G/F, Sun & Moon Building, 45 Sing Woo Road, Happy Valley, Hong Kong 3 HK Hopewell Centre Branch Shop 2A, 2/F, Hopewell Centre, 183 Queen's Road East, Wan Chai, Hong Kong 4 HK Park Lane Branch Shops 1.09 - 1.10, 1/F, Style House, Park Lane Hotel, 310 Gloucester Road, Causeway Bay, Hong Kong 5 HK Sun Hung Kai Centre Shops 115-117 & 127-133, 1/F, Sun Hung Branch Kai Centre, 30 Harbour Road, Wan Chai, Hong Kong 6 HK Central Branch Basement, 29 Queen's Road Central, Central, Hong Kong 7 HK Exchange Square Branch Shop 102, 1/F, Exchange Square Podium, Central, Hong Kong 8 HK Hay Wah Building Branch Hay Wah Building, 71-85 Hennessy Road, Wan Chai, Hong Kong 9 HK Hong Kong Office Level 3, 1 Queen's Road Central, Central, Hong Kong 10 HK Chai Wan Branch Shop No. 1-11, Block B, G/F, Walton Estate, Chai Wan, Hong Kong 11 HK Cityplaza Branch Unit 065, Cityplaza I, Taikoo Shing, Quarry Bay, Hong Kong 12 HK Electric Road Branch Shop A2, Block A, Sea View Estate, Watson Road, North Point, Hong Kong 13 HK Island Place Branch Shop 131 - 132, Island Place, 500 King's Road, North Point, Hong Kong 14 HK North Point Branch G/F, Winner House, 306-316 King's Road, North Point, Hong Kong 15 HK Quarry Bay Branch G/F- 1/F, 971 King's Road, -
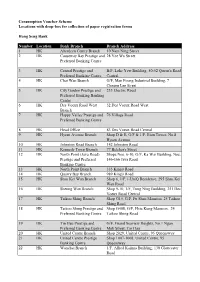
Consumption Voucher Scheme-Locations with Drop-Box
Consumption Voucher Scheme Locations with drop-box for collection of paper registration forms Hang Seng Bank Number Location Bank Branch Branch Address 1 HK Aberdeen Centre Branch 10 Nam Ning Street 2 HK Causeway Bay Prestige and 28 Yee Wo Street Preferred Banking Centre 3 HK Central Prestige and B/F, Loke Yew Building, 50-52 Queen's Road Preferred Banking Centre Central 4 HK Chai Wan Branch G/F, Man Foong Industrial Building, 7 Cheung Lee Street 5 HK City Garden Prestige and 233 Electric Road Preferred Banking Banking Centre 6 HK Des Voeux Road West 52 Des Voeux Road West Branch 7 HK Happy Valley Prestige and 76 Village Road Preferred Banking Centre 8 HK Head Office 83 Des Voeux Road Central 9 HK Hysan Avenue Branch Shop D & E, G/F & 1/F, Eton Tower, No.8 Hysan Avenue 10 HK Johnston Road Branch 142 Johnston Road 11 HK Kennedy Town Branch 77 Belcher's Street 12 HK North Point (Java Road) Shops Nos. 6-10, G/F, Ka Wai Building, Nos. Prestige and Preferred 146-166 Java Road Banking Centre 13 HK North Point Branch 335 King's Road 14 HK Quarry Bay Branch 989 King's Road 15 HK Shau Kei Wan Branch Shop 6, 1/F, i-UniQ Residence, 295 Shau Kei Wan Road 16 HK Sheung Wan Branch Shop 9-10, 1/F, Tung Ning Building, 251 Des Voeux Road Central 17 HK Taikoo Shing Branch Shop G15, G/F, Fu Shan Mansion, 25 Taikoo Shing Road 18 HK Taikoo Shing Prestige and Shop G408, G/F, Hsia Kung Mansion, 24 Preferred Banking Centre Taikoo Shing Road 19 HK Tin Hau Prestige and G/F, Grand Seaview Heights, No.1 Ngan Preferred Banking Centre Mok Street, Tin Hau 20 HK United -

Job Reference.Xlsx
Job Reference Project Industry Category Function Year Eredine Apartment Reconditioning Contractor 2017 38 Mount Kellett Rd, The Peak Festival Walk (2011) Ltd (FoodFest) Mall Refurbishment Contractor 2016-2017 No. 80, Tat Chee Avenue, Kowloon Tong. 28 Serven Road Exterior and Interior House Contractor 2016 (Swire Properties) Improvement Works Technoform BAUTEC Hong Kong Limited Builder's Works & Manufacturer Contractor & Coordinator 2016 2 Chun Cheong Street, Tseung Kwan O Industrial Estate, Tseung Kwan O, Renovation Works Kowloon. Upper House (Swire Properties) Hotel Builder's Works Contractor 2015 Pacific Place, 88, Queensway, Admiralty Three Pacific Place (Swire Properties) Commercial Builder's Works Contractor & Coordinator 2015 Room 1604-1609, Three Pacific Place One Pacific Place (LG1 and LG2 Carpark) Commercial Builder's Works Contractor & Coordinator 2015 (Swire Properties) Three Pacific Place (Star Street and QRE Plaza) Exterior Commercial Contractor & Coordinator 2015 (Swire Properties) Renovation Works Two Pacific Place (Gondola Tracks) Commercial Builder's Works Contractor & Coordinator 2015 (Swire Properties) Wonderland Villas Apartment Renovation Works Contractor & Coordinator 2015 Flat B, 24/F, Block 13, Wonderland Villas, 9 Wah King Hill Road. Unit J, 17/F Block 3, Golden Dragon Industrial Centre, 172-180 Tai Lin Pai Road, Kwai Chung, N.T. Tel : 2368 5300 Fax : 3016 9980 Email : [email protected] P.1/6 Job Reference Project Industry Category Function Year Everbest Insurance and Financial Services Ltd Office Commercial Contractor & Coordinator 2015 Suite 2002, 101 King's Road, North Point, Hong Kong. Renovation Works Park Signature Apartment Renovation Works Contractor & Coordinator 2015 22B, T5, Park Signature, 68 Kung Um Road, Yuen Long. Festival Walk (2011) Ltd (LG1 Washroom) Mall Renovation Works Contractor & Coordinator 2015 No. -

Major Properties of the Group
REVIEW OF MAJOR PROPERTIES OPERATIONS OF THE GROUP A. Major Properties under Development At December 31, 2020 Total Gross Expected Site Area Floor Area Stage of Completion Location (sq.m.) Main Usage (sq.m.) Completion Year MAINLAND CHINA WUHAN Heartland 66 Jinghan Avenue, 82,334 308,528 Superstructure 2020 onwards Qiaokou District WUXI Center 66 Jiankang Lu, 16,767 108,982 Foundation 2023 onwards (Phase 2) Liangxi District KUNMING Spring City 66 Dongfeng Dong 56,043 98,054 Superstructure 2023 onwards Lu/Beijing Lu, Panlong District HANGZHOU Westlake 66 Bai Jing Fang, 44,827 194,100 Foundation 2024 onwards Xiacheng District SHENYANG Forum 66 Qingnian Da Jie, 92,065 502,660 Foundation 2025 onwards Shenhe District HONG KONG NORTH POINT Electric Road 226-240 Electric 650 9,754 Foundation 2022 Redevelopment Road, IL 1618 Project (HLP held: 66.7%) KOWLOON BAY Amoycan Industrial 11 Ngau Tau Kok 1,923 16,226 Foundation 2023 Centre Road, NKIL 1744 Redevelopment Project All the above properties are wholly owned by HLP unless otherwise stated Commercial Office Apartments for Sale Hotel 75 2020 Annual Report REVIEW OF OPERATIONS MAJOR PROPERTIES OF THE GROUP B. Residential Properties Completed for Sale At December 31, 2020 Total No. of No. of Site Area Saleable Area Residential Car Parking Location (sq.m.) (sq.m.) Unit for Sale Spaces for Sale HONG KONG 23-39 Blue Pool Road 23-39 Blue Pool Road, 7,850 3,835 9 18 IL 5747 All the above properties are wholly owned by HLP C. Major Investment Properties At December 31, 2020 Total Gross Floor Area (sq.m.) Office and Residential No. -

Properties Held for Investment
Properties held for Investment Particulars of properties held for investment by the Group are as follows: Held by Category of Location the Group the lease Use 1. Car parking Spaces Nos. 129, 136, 139, 100% Long lease Commercial 141, 142, 145, 155, 157-161, 165, 167, 169, 172-174, 183 and 184 on Level 1 (3B) of the Garage Building City Garden 233 Electric Road North Point Hong Kong 2. Car Parking Space Nos. 22 & 23 100% Long lease Commercial on Level 3 (1B) of the Garage Building City Garden 233 Electric Road. North Point Hong Kong 3. Room No. 1604 on 16th Floor 100% Long lease Commercial Room Nos. 1702-4 on 17th Floor and the whole of 24th Floor China Insurance Group Building 141 Des Voeux Road Central 73 Connaught Road Central and 61-65 Gilman Street Central Hong Kong 4. Unit 06 on 35th Floor of Tower A 100% Long lease Residential Units 02 on 22nd Floor, 23rd Floor and 29th Floor of Tower B Fortress Metro Tower 238 King’s Road North Point Hong Kong 5. 2nd Floor 100% Long lease Commercial Silvercorp International Tower 707, 709, 711 and 713 Nathan Road Mongkok Kowloon 130 The Ming An (Holdings) Company Limited Annual Report 2006 17 Ming An Properties.indd 130 4/22/07 8:54:21 PM Properties held for Investment Held by Category of Location the Group the lease Use 6. Offi ce 1 on 4th Floor 100% Medium lease Commercial Yuen Long Trade Centre 99-109 Castle Peak Road Yuen Long New Territories 7.