ROSE: Random Over-Sampling Examples
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Côtes De Provence Rosé
Côtes de Provence Rosé Fabre en Provence, led today by Henri Fabre and his family, produces the best- selling estate grown rosé in all of France. For 17 generations, they have produced wine on their spectacular property near the coast. In fact, so synonymous are they Winemaker: Henri Fabre et famille with the appellation that they helped found the Provence AOC. This bright and Generation: 17 racy wine has a pleasing, lush mid-palate with a bit of raspberry and pine on the finish - sheer beauty in the glass. WINEMAKER BIOGRAPHY A 17th generation producer in the storied land of Provence, Henri Fabre is a man who’s utterly comfortable in his spruce French shoes. Working side by side with his sister and her family, Henri helps maintain their 6 shared domaines, along with their well-earned reputation as one of the icons of modern French rosé. ENOLOGIST Didier Mauduet TASTING NOTES Color Vibrant pink, with a slight silver rim in the glass Nose Violets, rose water, crushed graphite, sea salt, pine and peach Palate Bright and juicy, with a lush mid-palate and a touch of raspberry and sea salt at the finish Finish Great structure, refreshing, with medium+ finish VINEYARD & VINIFICATION Vineyard Location Cotes de Provence AOC, Provence Vineyard Size 300 ha Varietals List 29% Grenache 26% Syrah 45% Cinsault Farming Practices ‘Haute Valeur Environnementale’ Sustainable Agriculture Level 3 certified. This certification focuses on: Biodiversity, Phytosanitary strategy, fertilization and water resources management. Elevation 50 m Soils Calcareous and sandstone Maturation Summary Bottled for 1 month Alcohol 12.5 % Acidity 3.07 g/liter Residual Sugar 2.9 g/liter Annual Production 420,000 bottles REGION PROVENCE With over 2600 years of history, starting with the Phoenician founders of Marseille and continuing with the Romans, Provence is France’s oldest winegrowing region. -

Brut Champagne
BY THE GLASS Sparkling DOMAINE CHANDON BRUT, CALIFORNIA $14 LUCA PARETTI ROSE SPUMANTE, TREVISO, ITALY $16 MOET BRUT IMPERIAL, ÉPERNEY, FRANCE $24 PERRIER JOUET GRAND BRUT, CHAMPAGNE, FRANCE $26 VEUVE CLICQUOT YELLOW LABEL, REIMS, FRANCE $28 Sake SUIGEI TOKUBETSU “DRUNKEN WHALE”, JUNMAI $13 FUNAGUCHI KIKUSUI ICHIBAN, HONJOZO (CAN) $14 KAMOIZUMI “SUMMER SNOW” NIGORI (UNFILTERED) $21 SOTO JUNMAI DAIGINJO $18 HEAVENSAKE JUNMAI DAIGINJO $18 Rose VIE VITE “WHITE LABEL”, CÔTES DE PROVENCE, FRANCE $15 Whites 13 CELSIUS SAUVIGNON BLANC, NEW ZEALAND $15 50 DEGREE RIESLING, RHEINGAU, GERMANY $15 WENTE VINEYARDS ”RIVA RANCH” CHARDONNAY, ARROYO SECO, MONTEREY $15 RAMON BILBAO ALBARIÑO, RIAS BAIXAS, SPAIN $15 ANTINORI “GUADO AL TASSO” VERMENTINO, BOLGHERI, ITALY $17 BARTON GUESTIERE “PASSEPORT”, SANCERRE, FRANCE $22 DAOU ”RESERVE” CHARDONNAY, PASO ROBLES, CALIFORNIA $24 Reds TRAPICHE “OAK CASK” MALBEC, MENDOZA, ARGENTINA $14 SANFORD “FLOR DE CAMPO” PINOT NOIR, SANTA BARBARA, CALIFORNIA $16 NUMANTHIA TINTO DE TORO, TORO, SPAIN $17 SERIAL CABERNET SAUVIGNON, PASO ROBLES $17 “LR” BY PONZI VINEYARDS PINOT NOIR, WILLAMETTE VALLEY, OREGON $22 ANTINORI “GUADO AL TASSO” IL BRUCIATO, BOLGHERI, ITALY $24 JORDAN WINERY CABERNET SAUVIGNON, ALEXANDER VALLEY, CALIFORNIA $32 “OVERTURE” BV OPUS ONE NAPA VALLEY, CALIFORNIA $60 Beers HOUSE BEER LAGER $8 STELLA ARTOIS PILSNER $8 GOOSE ISLAND SEASONAL $8 HEINEKEN/LIGHT LAGER $8 GOLDEN ROAD HEFEWEIZEN $8 LAGUNITAS LITTLE SUMPIN’ SUMPIN’ ALE $8 bubbles Brut ARMAND DE BRIGNAC “ACE OF SPADES”, CHAMPAGNE, NV $650 DELAMOTTE -

Clover Hill Chardonnay Vidal Blanc Rosie's Rose Mélange De Maison
Limited Reserve Wine List Clover Hill $18.95 2017 Bacchanalia $28.95 The dry, crisp, and flinty finish may have one thinking of Pinot Grigio. Try this wine with oysters on the half shell. This unique blend of Cabernet Franc, Petit Verdot, and Merlot presents a well- structured and mid-bodied wine with Chardonnay $21.95 a spicy complexion. This barrel fermented selection features a soft palate and 2017 Cabernet Franc Reserve $38.00 balanced acid structure; tropical fruit overtones are complimented by the wine’s crisp apple finish. Aged 18 months in new French Oak barrels, this wine features dark fruits and lingering spice, a full-bodied mouth feel and rounded Vidal Blanc $18.95 tannins. This wine should be enjoyed now and in five years! A semi-sweet white wine with floral notes. This wine will Dessert Wines have one thinking of a Riesling. Arctica $25.95 Rosie’s Rose $18.95 Picked late season, these extremely ripe grapes are frozen post- This lush Rose presents a bright pink color with intense harvest and pressed. The liquid sugar drains out while the frozen raspberry flavors. Chilled, this off-dry wine is refreshing to water remains in the press, leaving a delightfully sweet dessert the senses and delightful on any occasion. wine having one thinking of honeysuckle. Mélange de Maison $21.95 Chambourcin Dessert Wine $28.00 A combination spanning vintage years, this light bodied and A multi-year blend of fortified wine aged in Woodford Reserve fruit forward red blend is perfect for a Summer picnic. Barrels for a period of two to five years; a friend of dark chocolate, cigars, cold nights, and fireplaces. -

Sauvignon Blanc Rose Elegance Chateau Des Bertrands Villa Solais
SPARKLING WINES / CHAMPAGNES Rose Elegance GLASS BOTTLE Chateau des Bertrands 100 Prosecco, Carpene Malvoti 9.00 34.00 Very fresh, with 101 Rotari Brut Arte Italiana 40.00 light herb and 102 Prosecco, Carpene Malvoti Rose 11.00 40.00 wet stones notes, 103 Moet & Chandon Imperial NV (HALF BOTTLE) 44.00 carrying tasty 104 Moet & Chandon Rose (HALF BOTTLE) 49.00 peach, mango, 105 Moet & Chandon Rose 79.00 and white cherry 106 Schramsburg Blanc de Blanc, (California) 56.00 fruit flavors. 109 Moet & Chandon Brut Imperial 71.00 Show more range 110 Veuve Clicquot “Yellow Label” Brut NV 92.00 than most, staying 111 Deutz Cuvee “Brut Rose” NV 120.00 elegant and 112 Dom Perignon, 2004 250.00 detailed through 114 Veuve Clicquot “La Grande Dame,” 1996 275.00 the finish. 115 Louis Roederer “Cristal,” 1999 325.00 WHITE WINES Sauvignon Blanc 200 Chardonnay, Boeri Bevion (Italy) 30.00 Merriam 202 Chardonnay Jermann, Venezia (Friuli, Italy) 14 48.00 203 Chardonnay, Columbia Crest (Washington) 14/16 36.00 “Danielle” 204 Chardonnay, Kendall Jackson, Vintners Reserve (California) 17 37.00 Light straw in 205 Chardonnay, Sonoma-Cutrer (Russia River, California) 15 55.00 color with hints 207 Chardonnay, La Crema (California) 16/17 38.00 of honey, ginger, honeysuckle and 208 Chardonnay, Hook and Ladder (Russian River) 15 46.00 ripe pineapple 209 Chardonnay, Robert Mondavi, (Napa, California) 13/15 48.00 on the nose. This 210 Chardonnay, Rodney Strong Chalk Hill, (Russian River) 15 48.00 wine tastes like 211 Chardonnay, Ferrari-Carano, TreTerres (California) 12 61.00 extracting the 212 Chardonnay, Davis Bynum (Russian River) 13 55.00 nectar out of 213 Chardonnay, Rombauer, (California) 15 75.00 a honeysuckle flower with 217 Sancerre, Blondeau (Loire, France) 15 54.00 rich textures of 218 Pouilly-Fuisse, Louis Latour (France) 15/16 70.00 green apple, lemon verbena, 219 Meursault, Louis Latour (France) 14 90.00 grapefruit and white peach. -
Managing Multiflora Rose
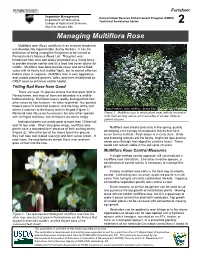
Factsheet Vegetation Management Conservation Reserve Enhancement Program (CREP) Department of Horticulture Technical Assistance Series College of Agricultural Sciences 2 http://vm.cas.psu.edu Managing Multiflora Rose Multiflora rose (Rosa multiflora) is an invasive shrub that can develop into impenetrable, thorny thickets. It has the distinction of being among the first plants to be named to Pennsylvania’s Noxious Weed List. This plant was introduced from Asia and widely promoted as a ‘living fence’ to provide erosion control and as a food and cover source for wildlife. Multiflora rose does provide cover and some food value with its fleshy fruit (called 'hips'), but its overall effect on habitat value is negative. Multiflora rose is very aggressive, and crowds planted grasses, forbs, and trees established on CREP acres to enhance wildlife habitat. Telling Bad Rose from Good There are least 13 species of rose that that grow 'wild' in Pennsylvania, and most of them are desirable in a wildlife habitat planting. Multiflora rose is readily distinguished from other roses by two features - its white-to-pinkish, five-petaled flowers occur in branched clusters, and the base of the leaf where it attaches to the thorny stem is fringed (Figure 1). Gary Fewless, Univ. of Wisc., Green Bay Memorial rose (Rosa wichuraiana) is the only other species Figure 2. Multiflora rose in whole-plant view, with its mounded with a fringed leaf base, but its flowers are borne singly. form from arching stems, and cascades of showy, white-to- pinkish blooms. Individual plants can easily grow to more than 10 feet tall and 10 feet wide. -

250 Years Since the First Rosé Champagne
250 years since the first rosé champagne Ruinart, the first established Champagne House, founded in 1729, has been shipping rosé champagne since 1764. The House’s account book is the proof. On 14 March 1764, it is written that there was a shipment of «a basket of 120 bottles, 60 bottles of which were Oeil de Perdrix». What is the connection between birds of the Gallinaceae family and the early history of the oldest Champagne House? In fact, the term «Oeil de Perdrix» means a colour which could be described as a delicate pink with coppery reflections. There’s no longer any doubt. Ruinart shipped its first bottles of rosé champagne in 1764. 250 years : such a fabulous anniversary in so many ways, an historic date which links Ruinart forever to the history of champagne. The account books, various correspondence and the accounts of the heads of the House have allowed us to discover a multitude of varieties and oenological trials in search of taste, flavour and the ideal colour. What was in all probability a rosé from maceration at the beginning would then evolve to become a blended rosé. Ruinart explored various ways of obtaining a coloured champagne, for example by using the colouring of some elderberries. The palette of colours for these wines was very large. There were a number of terms to define them in French: roset, oeil de perdrix, rozet, paillé (straw), clairet (pale wine) and even cerise (cherry). Towards the end of the 18th century, the expression «Oeil de Perdrix» disappeared in favour of names closer to those we use: rozet and then rosé. -

Rose List Legend ROSE NAME TYPE BED NOTES a Shropshire Lad
2014 ROSE LIST - International Rose Test Garden Rose List Legend CL - Climber, English - Shrub, F - Floribunda, GC - Ground Cover, GF - Grandiflora, HH - Hulthemia Hybrid HP - Hybrid Perpetual, HT - Hybrid Tea, LS - Landscape Shrub, Mini - Miniature, P - Polyanthas, S - Shrub, Tree - Tree Rose Amp - Amphitheater, K - Kiosk, LP - Lamp Post, VPR - Visitors Plaza Ramp ROSE NAME TYPE BED NOTES A Shropshire Lad English F34 Abbaye de Cluny HT F27 About Face GF A51, D15 Above All CL D40 Aimée Vibert CL A88 - LP All A'Twitter Mini F32 All Ablaze CL B4 All American Magic GF A53 All the Rage S, LS F32, Amp - hedge Aloha Hawaii CL B3 Amadeus CL B3 Amber Sunblaze Mini D40 America CL B1, F31 American Pillar CL E26 Angel Face CL, Tree D39, F5 Ann's Promise GF D26 Anthony Meilland F A64 Antique Caramel HT D33 Apéritif HT A83 Apricot Drift GC F32 Apricot Vigorosa LS F25, F26 April in Paris HT D13 Archbishop Desmond Tutu F C2 Aristocrat Mini A11 - Kiosk Arizona GF A46 Artistry HT A16, G2 Baby Boomer Mini A22 - Kiosk Baby Love Mini B4 Baby Paradise Mini D40 Baden Baden HT A76 Bajazzo CL B3 Ballerina S F31 Bantry Bay CL D42 Barbra Streisand HT D35 Be My Baby Mini D40 Be-Bop S B1 Belami HT A33 Betty Boop F E36, E37 Betty Prior F A45 Beverly HT A59 Bewitched HT F20, G5 Big Momma HT A65 Bishop's Castle English F23 Black Cherry F B1 Black Forest Rose F C25 Black Jade Mini A11 Black Magic HT D14 Blossomtime CL B3 Blue Girl CL D39 Blueberry Hill F F20, G2 Blushing Knockout S E27, E28 Bolero F F32 Bonica S E29 Boogie Woogie Mini A23 - Kiosk Bougain Feel Ya Shrub -

Chardonnay Rose Rs
Catalogue of grapevines cultivated in France © UMT Géno-Vigne® INRA - IFV - Montpellier SupAgro http://plantgrape.plantnet-project.org Edited on 02/10/2021 Chardonnay rose Rs Name of the variety in France Chardonnay rose Origin This variety corresponds to the pink mutation of Chardonnay. Synonyms There is no officially recognized synonym in France nor in the other countries of the European Union, for this variety. Legal information In France, Chardonnay rose is officially listed in the "Catalogue of vine varieties" since 2018 on the A list but is not yet classified. Use Wine grape variety. Evolution of cultivated areas in France 2018 ha 0.1 Descriptive elements The description corresponds to that of Chardonnay, except for the skin color of the berries when ripe, which is pink in this case. Genetic profile Microsatellite VVS2 VVMD5 VVMD7 VVMD27 VRZAG62 VRZAG79 VVMD25 VVMD28 VVMD32 Allel 1 135 232 239 178 188 244 238 216 239 Allel 2 141 236 243 186 196 246 254 227 271 Phenology Bud burst: 1 day after Chasselas. Grape maturity: mid-season, 2 weeks and a half to 3 weeks after Chasselas. Suitability for cultivation and agronomic production Aptitudes are close to those of Chardonnay. Chardonnay rose seems to have a slightly later maturity and to be less productive that the white version. Susceptibility to diseases and pests The susceptibilities and tolerances of Chardonnay rose are roughly identical to those of Chardonnay. It tends to be slightly less sensitive to grey rot. Technological potentiality Chardonnay rose's bunches are small and compact. The berries are small to medium and simple-flavored. -

Friuli, Italy
TRAVEL: FRIULI Map: Maggie Nelson Maggie Map: My perfect day in Friuli Morning After breakfast at the peaceful Colli di Poianis agriturismo*, drive 15 minutes into Cividale del Friuli. Above: perched on a ravine, Cividale del Friuli is Perched on a ravine created by the The Decanter travel guide to the perfect stop before exploring Colli Orientali river Natisone, Cividale is crammed FACT FILE full of medieval history, plus some Selected DOCG/ solely for sweet wines, made from indigenous excellent shopping opportunities. DOCs & top grapes variety, Verduzzo Friulano. Energised by a mid-morning Vineyards at San Floriano DOCG café in Cividale’s main square, drive Italy A perfect food match to Ronchi di Cialla, set in one of the incredible vista of rolling hills and Ramandolo 60ha**; Friuli, Verduzzo Friulano Just as the Bordelais prefer to drink Sauternes Colli Orientali’s prettiest valleys. vineyards before you is a while the northerly Alpine part bordering as an aperitif, so Friulians know that the You’ll meet the Rapuzzi family, the patchwork of Italy and Slovenia. DOC Stretching from the Alps to the Adriatic, Friuli is home to rolling Austria is decidedly Germanic. honeyed, mildly tannic, high-acid Ramandolo saviours of Schioppettino from Grave 2,273ha**; For visitors seeking outstanding food and goes best with the local Prosciutto di San obscurity and producers of some Evening and overnight Pinot Grigio, Merlot, hills, picturesque villages and a wine, and beautiful countryside, the region is Daniele (similar to Prosciutto di Parma) or of the best wines in the region. After a scenic 30-minute drive, Sauvignon Blanc wealth of boutique wine a paradise. -

EPP-7329 Rose Rosette Disease
Oklahoma Cooperative Extension Service EPP-7329 Rose Rosette Disease Jennifer Olson Oklahoma Cooperative Extension Fact Sheets Assistant Extension Specialist and Plant Disease Diagnostician are also available on our website at: http://osufacts.okstate.edu Eric Rebek Associate Professor and State Extension Specialist Horticultural Entomology by the disease will remain discolored and distorted (Figure 3). Mike Schnelle Infected shoots may be more succulent and pliable than normal Extension Ornamentals-Floriculture Specialist rose stems. Excessive prickles (thorns) may form, which are initially soft and pliable and later may harden (Figure 4). A common symptom of RRD is a brush-like cluster of shoots or branches that originate at or near the same point, a Introduction symptom that is called a witches’ broom or rosette (Figure 5). Rose rosette disease (RRD) was first identified in the Leaves within the witches’ broom may be stunted, distorted, 1940s in the Rocky Mountains. Rosa species and hybrids are and pigmented red or yellow. Symptoms of witches’ broom, leaf the only known hosts for the disease. Multiflora rose (Rosa discoloration, and/or distortion are often visible on one branch multiflora) is a common wild host of RRD and the disease has or more and may spread randomly across the entire plant spread throughout much of the U.S. on multiflora and other (Figure 6). The flowers may be distorted, mottled or blighted wild roses. The disease has been found in cultivated roses and fail to open fully (Figure 7). Severely infected plants may in Oklahoma and in many other states including Missouri, not produce flowers. On some cultivars, new shoots with RRD Arkansas and Texas. -

Gewürztraminer 2017
2017 Gewürztraminer Estate Grown and Bottled Ravines Gewürztraminer delights with complex aromas of rose petal and lychee with a bright acidity and a spicy finish. Vinification The grapes were harvested early in the day and rapidly de-stemmed, crushed and placed in the membrane press. In order to extract the wonderful aromas of the Gewurztraminer variety, the grapes were given a long skin contact time at low temperature. After a long and gentle press cycle, the juice was settled, racked and fermented at low temperature. With excellent ripeness level, we chose to leave a little residual sugar in order to have a more moderate alcohol level and a more balanced wine. The wine was racked and aged in stainless steel prior to filtration and bottling. Appellation: Fingerlakes AVA, New York Varietal Composition: 100% Gewürztraminer Alcohol: 13% Acidity: 7.5 g/l RS: 9 g/l pH: 3.42 Vineyards White Springs Vineyard (100%) The entire production of Gewürztraminer is estate grown in our White Springs Vineyard, just south of Ge- neva. The soil is Honeoye Loam over limestone, as the vineyard is located in the northern part of the Finger Lakes and the continuation of the Niagara Escarpment Extension. Having already worked with this vineyard for many years, we have always found Gewürztraminer to be one of the best suited grape varieties for this site. The vineyard was planted with a very high planting density allowing us to crop each vine very modestly. A warm and sunny growing season resulted in optimal ripeness level and thanks to the vigilance and skills of the vineyard team, grapes were harvested under optimal conditions. -

2017 Reserve Cabernet Sauvignon Rosé Horse Heaven Hills
2017 Reserve Cabernet Sauvignon Rosé horse heaven hills Appellation • Horse Heaven Hills Growing Season Blend • 100% Cabernet Sauvignon • The 2017 growing season was cooler and crop yields were Total Acidity • 0.59 g/100ml significantly lower in comparison to the past two vintages. pH • 2.95 • The cooler early spring temperatures along with ample soil moisture from winter precipitation and spring rainfall, Alcohol • 13.2% delayed ripening and helped to retain fresh fruit aromatics Cases Crafted • 150 and mouthwatering acidity. • Rainfall was minimal from mid-May to mid-August and temperatures were above average in July and August • Despite cold winter conditions, 2017 gave us concentrated wines with classic Washington state character. Vineyards • The fruit is sourced from Block 39 of Columbia Crest’s select estate vineyards located in the Horse Heaven Hills. • The balance between warm daytime temperatures and cooler evenings helps concentrate aromatics, retain acidity and enhance complexity. • The appellation’s low rainfall yields concentrated fruit with depth and varietal expression. Vinification • The Estate fruit was fed directly to press where the juice was extracted gently but quickly. Tasting Notes • The pressing was monitored to get a balance of color and flavor extraction. “This wine is a great “rose gold” color with delicate floral aromas. Flavors of fresh strawberry, watermelon, mixed • The juice was cold settled for two days then racked off solids berries give way to a finish that shows the balanced acidity to a temperature controlled stainless steel tank where the with hints of rhubarb.” wine underwent a cool, 22 day fermentation to retain the fresh aromatics.