International Scan of Connected and Automated Vehicle Technology Deployment Efforts
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Complete 2020 Annual Report (PDF)
2020 REPORT TO THE COMMUNITY Youth wade into Crissy Field Marsh during Project WISE in fall 2019 (See story, page 5). Crissy Field Center moves into new space at DEAR FRIEND the Tunnel Tops in 2021. We’ll improve those trails we missed so much. We’ll welcome back OF THE PARKS, our volunteers and visitors with open arms—or maybe a friendly wave. With our partners, our hat a year to start as only the second focus on making parks accessible for all—so W CEO in the history of the Golden Gate that everyone feels welcome in parks and can National Parks Conservancy. Throughout this enjoy the many health benefits of nature—is Report to the Community, we shine a light on more important now than ever. our major accomplishments of 2019. We had That’s why I’m so grateful for my first year no idea what was just around the corner. at the helm of the Parks Conservancy. I’ve I came into this job believing strongly in gotten to see the park spirit shine bright under the power of national parks to inspire and the toughest conditions. The snapshot of heal. The Bay Area shelter-in-place orders 2019 you’ll get in this report shows us what’s somehow strengthened that conviction. When possible for our long-term future, and I can’t we lose something, we miss it more than ever. wait to get there. It may take some time to And, we learn a powerful lesson in not taking recover, but with your help, our parks will it for granted. -

Self-Driving Car Autonomous System Overview
Self-Driving Car Autonomous System Overview - Industrial Electronics Engineering - Bachelors’ Thesis - Author: Daniel Casado Herráez Thesis Director: Javier Díaz Dorronsoro, PhD Thesis Supervisor: Andoni Medina, MSc San Sebastián - Donostia, June 2020 Self-Driving Car Autonomous System Overview Daniel Casado Herráez "When something is important enough, you do it even if the odds are not in your favor." - Elon Musk - 2 Self-Driving Car Autonomous System Overview Daniel Casado Herráez To my Grandfather, Family, Friends & to my supervisor Javier Díaz 3 Self-Driving Car Autonomous System Overview Daniel Casado Herráez 1. Contents 1.1. Index 1. Contents ..................................................................................................................................................... 4 1.1. Index.................................................................................................................................................. 4 1.2. Figures ............................................................................................................................................... 6 1.1. Tables ................................................................................................................................................ 7 1.2. Algorithms ........................................................................................................................................ 7 2. Abstract ..................................................................................................................................................... -
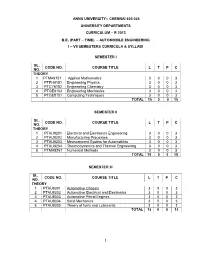
Anna University:: Chennai 600 025 University Departments Curriculum – R 2013 B.E. (Part – Time) – Automobile Engineering
ANNA UNIVERSITY:: CHENNAI 600 025 UNIVERSITY DEPARTMENTS CURRICULUM – R 2013 B.E. (PART – TIME) – AUTOMOBILE ENGINEERING I – VII SEMESTERS CURRICULA & SYLLABI SEMESTER I SL. CODE NO. COURSE TITLE L T P C NO. THEORY 1 PTMA8151 Applied Mathematics 3 0 0 3 2 PTPH8151 Engineering Physics 3 0 0 3 3 PTCY8152 Engineering Chemistry 3 0 0 3 4 PTGE8153 Engineering Mechanics 3 0 0 3 5 PTGE8151 Computing Techniques 3 0 0 3 TOTAL 15 0 0 15 SEMESTER II SL. CODE NO. COURSE TITLE L T P C NO. THEORY 1 PTAU8201 Electrical and Electronics Engineering 3 0 0 3 2 PTAU8202 Manufacturing Processes 3 0 0 3 3 PTAU8203 Measurement System for Automobiles 3 0 0 3 4 PTAU8204 Thermodynamics and Thermal Engineering 3 0 0 3 5 PTMA8251 Numerical Methods 3 0 0 3 TOTAL 15 0 0 15 SEMESTER III SL. CODE NO. COURSE TITLE L T P C NO. THEORY 1 PTAU8301 Automotive Chassis 3 0 0 3 2 PTAU8302 Automotive Electrical and Electronics 3 0 0 3 3 PTAU8303 Automotive Petrol Engines 3 0 0 3 4 PTAU8304 Solid Mechanics 3 0 0 3 5 PTAU8305 Theory of fuels and Lubricants 3 0 0 3 TOTAL 15 0 0 15 1 SEMESTER IV SL. CODE NO. COURSE TITLE L T P C NO. THEORY 1 PTAU8401 Automotive Diesel Engines 3 0 0 3 2 PTAU8402 Automotive Transmission 3 0 0 3 3 PTAU8403 Two and Three Wheeler Technology 3 0 0 3 4 PTPR8351 Kinematics and Dynamics of Machines 3 0 0 3 PRACTICAL 5 PTAU8411 Automotive Engine and Chassis Components 0 0 3 2 Laboratory TOTAL 12 0 3 14 SEMESTER V SL. -

Program Analysis Based Approaches to Ensure Security and Safety of Emerging Software Platforms
Program Analysis Based Approaches to Ensure Security and Safety of Emerging Software Platforms by Yunhan Jia A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Computer Science and Engineering) in The University of Michigan 2018 Doctoral Committee: Professor Z. Morley Mao, Chair Professor Atul Prakash Assistant Professor Zhiyun Qian, University of California Riverside Assistant Professor Florian Schaub Yunhan Jia [email protected] ORCID iD: 0000-0003-2809-5534 c Yunhan Jia 2018 All Rights Reserved To my parents, my grandparents and Xiyu ii ACKNOWLEDGEMENTS Five years have passed since I moved into the Northwood cabin in Ann Arbor to chase my dream of obtaining a Ph.D. degree. Now, looking back from the end of this road, there are so many people I would like to thank, who are an indispensable part of this wonderful journey full of passion, love, learning, and growth. Foremost, I would like to gratefully thank my advisor, Professor Zhuoqing Morley Mao for believing and investing in me. Her constant support was a definite factor in bringing this dissertation to its completion. Whenever I got lost or stucked in my research, she would always keep a clear big picture of things in mind and point me to the right direction. With her guidance and support over these years, I have grown from a rookie to a researcher that can independently conduct research. Besides my advisor, I would like to thank my thesis committee, Professor Atul Prakash, Professor Zhiyun Qian, and Professor Florian Schaub for their insightful suggestions, com- ments, and support. -

Human Centred Design of First and Last Mile Mobility Vehicles
Coventry University DOCTOR OF PHILOSOPHY Human centred design of first and last mile mobility vehicles Wasser, Joscha Award date: 2020 Awarding institution: Coventry University Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of this thesis for personal non-commercial research or study • This thesis cannot be reproduced or quoted extensively from without first obtaining permission from the copyright holder(s) • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Download date: 11. Oct. 2021 Human Centred Design of First and Last Mile Mobility Vehicles by 1,2,4 Joscha Wasser A thesis submitted in partial fulfilment of the University’s requirements for the Degree of Doctor of Philosophy. Supervisors: Andrew Parkes1, Cyriel Diels3, Michael Tovey1 and Anthony Baxendale2 1 The National Transport Design Centre, Swift Road, Coventry CV1 2TT, UK 2 HORIBA MIRA Ltd, Watling Street, Nuneaton, Warwickshire, CV10 0TU, UK 3 Royal College of Art, Kensington Gore, Kensington, London SW7 2EU, UK 4 Fraunhofer FKIE, Fraunhoferstraße 20, 53343 Wachtberg, Germany Content removed on data protection grounds 2 3 4 5 6 Content removed on data protection grounds 7 Content removed on data protection grounds 8 Content removed on data protection grounds 9 10 Acknowledgements I would like to express my sincere gratitude to Dr. -
Operational Requirements for Soldier-Robot Teaming
CAN UNCLASSIFIED Operational Requirements for Soldier-Robot Teaming Simon Banbury Kevin Heffner Hugh Liu Serge Pelletier Calian Ltd. Prepared by: Calian Ltd. 770 Palladium Drive Ottawa, Canada K2V 1C8 Contractor Document Number: DND-1144.1.1-01 PSPC Contract Number: W7719-185397/001/TOR Technical Authority: Ming Hou, DRDC – Toronto Research Centre Contractor's date of publication: August 2020 The body of this CAN UNCLASSIFIED document does not contain the required security banners according to DND security standards. However, it must be treated as CAN UNCLASSIFIED and protected appropriately based on the terms and conditions specified on the covering page. Defence Research and Development Canada Contract Report DRDC-RDDC-2020-C172 November 2020 CAN UNCLASSIFIED CAN UNCLASSIFIED IMPORTANT INFORMATIVE STATEMENTS This document was reviewed for Controlled Goods by Defence Research and Development Canada using the Schedule to the Defence Production Act. Disclaimer: This document is not published by the Editorial Office of Defence Research and Development Canada, an agency of the Department of National Defence of Canada but is to be catalogued in the Canadian Defence Information System (CANDIS), the national repository for Defence S&T documents. Her Majesty the Queen in Right of Canada (Department of National Defence) makes no representations or warranties, expressed or implied, of any kind whatsoever, and assumes no liability for the accuracy, reliability, completeness, currency or usefulness of any information, product, process or material included in this document. Nothing in this document should be interpreted as an endorsement for the specific use of any tool, technique or process examined in it. Any reliance on, or use of, any information, product, process or material included in this document is at the sole risk of the person so using it or relying on it. -

Scenarios for Autonomous Vehicles – Opportunities and Risks for Transport Companies
Position Paper / November 2015 Scenarios for Autonomous Vehicles – Opportunities and Risks for Transport Companies Imprint Verband Deutscher Verkehrsunternehmen e. V. (VDV) Kamekestr. 37–39 · 50672 Cologne · Germany T +49 221 57979-0 · F +49 221 57979-8000 [email protected] · www.vdv.de Contact Martin Röhrleef üstra Hannover, Head of the Mobility Association Department Chairman of the VDV working group “Multimodal Mobility” T +49 511 1668-2330 F +49 511 1668-962330 [email protected] Dr. Volker Deutsch VDV, Head of the Traffic Planning Department T +49 221 57979-130 F +49 221 57979-8130 [email protected] Dr. Till Ackermann VDV, Head of the Business Development Department T +49 221 57979-110 F +49 221 57979-8110 [email protected] Figure sources Title, page 18 VDV Page 5 VDA Page 9 Morgan Stanley Summary: Autonomous vehicles: opportunities and risks for public transport The development and operation of fully automated, driverless vehicles (“autonomous vehicle”) will have a disruptive impact on the transport market and thoroughly mix up the present usage patterns as well as the present ownership and business models. The autonomous vehicle is a game changer, not least because the traditional differences between the various modes of transport become indistinct as an autonomous vehicle can be everything, in principle: a private car, a taxi, a bus, a car-sharing vehicle or a shared taxi. To express it dramatically: the autonomous vehicle could be part of the public transport system – but it could also seriously threaten the existence of today’s public and long-distance transport: The autonomous vehicle can threaten the existence of public transport because it makes driving much more attractive. -

Industry Ponders Natural Gas Applications
160 years of innovation theengineer.co.uk March 2016 | £3.70 FIRST FOR TECHNOLOGY & INNOVATION Fossil future Industry ponders natural gas applications N • 1 O 6 I 0 T Y A E V A O R N S N I O F & E G N N G I I R N E E Mono mania Taking aim Space spin-off How a Liverpool-based SME HVM Catapult technology Ultrasound technology is leaving bigger supercar chief Dr Phill Cartwright developed to monitor manufacturers outlines his vision for astronauts comes in its wake »31 the future »34 back down to Earth »49 58 »Careers feature Britain’s booming automotive sector has a pressing skills shortage TE_010316 1 02/03/2016 18:42 Your One-Stop Shop for Process Measurement and Control Products • 100,000 products online • Easy online ordering • Same day shipping on instock items • Full technical support Platinum Series Series High accuracy, fast responding,respo low cost temperature and process controllers Flow and Environmental Products Large selection of flow and environmental devices including handheld, ultrasonic, controllers and much more PXM309 series Available in absolute or gauge pressure and sealed to IP65 /IP67 We are here to serve you With our manufacturing know-how and extensive warehousing around the world, OMEGA offers the most impressive range of products in the industry. Probes and Assemblies Our sales representatives are able to swiftly dispatch For all environments and applications your order and provide instantaneous updates. At OMEGA, no request or order is too big or too small. omega.co.uk 0800 488 488 Temperature Pressure Automation Flow DAS pH Heaters [email protected] © COPYRIGHT 2015 OMEGA ENGINEERING,LTD. -

Regulatory Landscape
REGULATORY LANDSCAPE: Regulation is one 12 of the major drivers of change within the automotive sector; changes happening at almost every level are forcing an evolution of the sector THE INNOVATION GAME: 34 David Moss, Nissan's Vice President, Vehicle Design and Development, discusses LCV innovation The UK automotive sector operates in a unique environment, with strategic alignment between industry and government support Ian Constance, While the internal combustion chief executive engine will remain part of the of the Advanced Propulsion Centre automotive ecosystem for some time to come, there is an increasing need to conserve fuel and minimise emissions lobal climate-change Europe. The UK automotive sector common technical interest. while maintaining compelling and air-quality operates in a unique environment, At the APC we have identified consumer propositions. agendas are driving with strategic alignment between a number of opportunity areas This is leading to increased rapid technological industry and government support. that align strong capability and electrification of the vehicle change within The UK combines world-leading good potential for growth in powertrain, which in turn the automotive research, world-renowned organisations operating in the UK is disrupting incumbent sector. This, in aptitude for innovation and with likely market demand. These supply chains, and providing turn, is creating world-class manufacturing provide the potential for the UK opportunities for organisations new opportunities productivity. to assert a strong future supply- willing to embrace change. globally, as Combining these advantages chain position, given suitable Organisations operating international, in a collaborative approach investment. Identifying these in the UK can build upon the national and local underpins the aims of the opportunities is a step towards advantages and capabilities regulations drive Advanced Propulsion Centre (APC) providing a foundation for further afforded by the British action on CO2 emissions and programme. -
Cybersecurity for Connected Cars Exploring Risks in 5G, Cloud, and Other Connected Technologies
Cybersecurity for Connected Cars Exploring Risks in 5G, Cloud, and Other Connected Technologies Numaan Huq, Craig Gibson, Vladimir Kropotov, Rainer Vosseler TREND MICRO LEGAL DISCLAIMER The information provided herein is for general information Contents and educational purposes only. It is not intended and should not be construed to constitute legal advice. The information contained herein may not be applicable to all situations and may not reflect the most current situation. 4 Nothing contained herein should be relied on or acted upon without the benefit of legal advice based on the particular facts and circumstances presented and nothing The Concept of Connected Cars herein should be construed otherwise. Trend Micro reserves the right to modify the contents of this document at any time without prior notice. 7 Translations of any material into other languages are intended solely as a convenience. Translation accuracy is not guaranteed nor implied. If any questions arise Research on Remote Vehicle related to the accuracy of a translation, please refer to Attacks the original language official version of the document. Any discrepancies or differences created in the translation are not binding and have no legal effect for compliance or enforcement purposes. 13 Although Trend Micro uses reasonable efforts to include Cybersecurity Risks of Connected accurate and up-to-date information herein, Trend Micro makes no warranties or representations of any kind as Cars to its accuracy, currency, or completeness. You agree that access to and use of and reliance on this document and the content thereof is at your own risk. Trend Micro disclaims all warranties of any kind, express or implied. -
The Impact of Automated Transport on the Role, Operations and Costs of Road Operators and Authorities in Finland
The impact of automated transport on the role, operations and costs of road operators and authorities in Finland EU-EIP Activity 4.2 Facilitating automated driving Risto Kulmala, Juhani Jääskeläinen, Seppo Pakarinen Traficomin tutkimuksia ja selvityksiä Traficoms forskningsrapporter och utredningar Traficom Research Reports 6/2019 Traficom Research Reports 6/2019 Julkaisun päivämäärä 12.3.2019 Julkaisun nimi The impact of automated transport on the role, operations and costs of road operators and authorities in Finland (Automaattiajoneuvojen vaikutukset tienpitäjien ja viranomaisten rooliin, toimintaan ja kustannuksiin Suomessa) Tekijät Risto Kulmala, Juhani Jääskeläinen, Seppo Pakarinen Toimeksiantaja ja asettamispäivämäärä Liikennevirasto ja Trafi 22.3.2018 Julkaisusarjan nimi ja numero ISSN verkkojulkaisu) 2342-0294 Traficomin tutkimuksia ja selvityksiä ISBN (verkkojulkaisu) 978-952-311-306-0 6/2019 Asiasanat Automaattiajaminen, tieliikenne, automaattiauto, vaikutus, tienpitäjä. viranomainen, rooli, kustannukset, toiminta, Suomi Tiivistelmä Tämä kansallinen tutkimus tehtiin osana työpakettia ”Facilitating automated driving” EU:n CEF- ohjelman hankkeessa EU EIP keskittyen viiteen korkean tason automaattiajamisen sovellukseen: moottoritieautopilotti, automaattikuorma-autot niille osoitetuilla väylillä, automaattibussit sekaliikenteessä, robottitaksit sekä automaattiset kunnossapito- ja tietyöajoneuvot. Raportti kuvaa automaattiajamiseen liittyvät säädöspuitteet ja viranomaisstrategiat eri puolilla maailmaa ja etenkin Euroopassa. Tutkimus -

Zbwleibniz-Informationszentrum
A Service of Leibniz-Informationszentrum econstor Wirtschaft Leibniz Information Centre Make Your Publications Visible. zbw for Economics Parker, Geoffrey; Petropoulos, Georgios; Marshall van Alstyne Working Paper Platform mergers and antitrust Bruegel Working Paper, No. 2021/01 Provided in Cooperation with: Bruegel, Brussels Suggested Citation: Parker, Geoffrey; Petropoulos, Georgios; Marshall van Alstyne (2021) : Platform mergers and antitrust, Bruegel Working Paper, No. 2021/01, Bruegel, Brussels This Version is available at: http://hdl.handle.net/10419/237621 Standard-Nutzungsbedingungen: Terms of use: Die Dokumente auf EconStor dürfen zu eigenen wissenschaftlichen Documents in EconStor may be saved and copied for your Zwecken und zum Privatgebrauch gespeichert und kopiert werden. personal and scholarly purposes. Sie dürfen die Dokumente nicht für öffentliche oder kommerzielle You are not to copy documents for public or commercial Zwecke vervielfältigen, öffentlich ausstellen, öffentlich zugänglich purposes, to exhibit the documents publicly, to make them machen, vertreiben oder anderweitig nutzen. publicly available on the internet, or to distribute or otherwise use the documents in public. Sofern die Verfasser die Dokumente unter Open-Content-Lizenzen (insbesondere CC-Lizenzen) zur Verfügung gestellt haben sollten, If the documents have been made available under an Open gelten abweichend von diesen Nutzungsbedingungen die in der dort Content Licence (especially Creative Commons Licences), you genannten Lizenz gewährten Nutzungsrechte. may exercise further usage rights as specified in the indicated licence. www.econstor.eu PLATFORM MERGERS AND ANTITRUST TED VERSION 15 2021 JUNE 15 TED VERSION UPDA | GEOFFREY PARKER, GEORGIOS PETROPOULOS AND MARSHALL VAN ALSTYNE ISSUE 01/2021 ISSUE 01/2021 | Platform ecosystems rely on economies of scale, data-driven economies of scope, high quality algorithmic systems, and strong network effects that frequently promote winner-takes-most markets.