Schedulability Analysis of Ethernet Audio Video Bridging Networks with Scheduled Traffic Support
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Publication Title 1-1962
publication_title print_identifier online_identifier publisher_name date_monograph_published_print 1-1962 - AIEE General Principles Upon Which Temperature 978-1-5044-0149-4 IEEE 1962 Limits Are Based in the rating of Electric Equipment 1-1969 - IEEE General Priniciples for Temperature Limits in the 978-1-5044-0150-0 IEEE 1968 Rating of Electric Equipment 1-1986 - IEEE Standard General Principles for Temperature Limits in the Rating of Electric Equipment and for the 978-0-7381-2985-3 IEEE 1986 Evaluation of Electrical Insulation 1-2000 - IEEE Recommended Practice - General Principles for Temperature Limits in the Rating of Electrical Equipment and 978-0-7381-2717-0 IEEE 2001 for the Evaluation of Electrical Insulation 100-2000 - The Authoritative Dictionary of IEEE Standards 978-0-7381-2601-2 IEEE 2000 Terms, Seventh Edition 1000-1987 - An American National Standard IEEE Standard for 0-7381-4593-9 IEEE 1988 Mechanical Core Specifications for Microcomputers 1000-1987 - IEEE Standard for an 8-Bit Backplane Interface: 978-0-7381-2756-9 IEEE 1988 STEbus 1001-1988 - IEEE Guide for Interfacing Dispersed Storage and 0-7381-4134-8 IEEE 1989 Generation Facilities With Electric Utility Systems 1002-1987 - IEEE Standard Taxonomy for Software Engineering 0-7381-0399-3 IEEE 1987 Standards 1003.0-1995 - Guide to the POSIX(R) Open System 978-0-7381-3138-2 IEEE 1994 Environment (OSE) 1003.1, 2004 Edition - IEEE Standard for Information Technology - Portable Operating System Interface (POSIX(R)) - 978-0-7381-4040-7 IEEE 2004 Base Definitions 1003.1, 2013 -

XMOS for AVB Ethernet Based Networking for Audio/Video
Only a few years ago, computer networks were complex beasts tended by special acolytes and running on different standards. Today they have become commonplace in many homes and offices, simply plugged together using Ethernet technology. The same revolutionary change is coming for Audio/Video (AV) networking, as AVB (Audio XMOS for AVB: Video Bridging) products that run over the same network, Ethernet based networking begin to enter the market. for Audio/Video Putting together networks of AV equipment for professional and consumer use, or for use in How Ethernet Works vehicles, is about to become simpler while also Within Ethernet, data is transmitted between delivering better quality. No longer will devices (such as a computer and a printer) in specialist connectors and cables be needed to packets. Each packet carries one or more create a rats' nest of connectivity. Instead addresses for its destination. Like a postal packet traversing the postal system, the network has no Audio Video Bridging (AVB), a set of knowledge of what is in the packet, but uses the international standards, will make setting up address to pass the packet to the next point in the and managing networks almost as simple as network. just plugging together the different elements. In an Ethernet based network, each endpoint Sound and video sources will be mixed and (computer, storage element, printer etc.) is distributed to screens and speakers, with high identified by a unique address and has a single quality, low latency and tight synchronization. connection to the network, through an Ethernet Furthermore, the connectors and cables are switch. -

Software Architecture for a Multiple AVB Listener and Talker Scenario
Software Architecture for a Multiple AVB Listener and Talker Scenario Christoph Kuhr and Alexander Car^ot Department of Computer Sciences and Languages, Anhalt University of Applied Sciences Lohmannstr. 23, 06366 K¨othen, Germany, fchristoph.kuhr, [email protected] Abstract 1.2 Concept for a Realtime Processing Cloud This paper presents a design approach for an AVB network segment deploying two differ- A specialized and scalable server infrastructure ent types of AVB server for multiple paral- is required to provide the realtime streaming re- lel streams. The first type is an UDP proxy quirements of this research project. The ser- server and the second server type is a digital vice time property of an Ethernet frame arriv- signal processing server. The Linux real time ing on a serial network interface at the wide area operating system configurations are discussed, network (WAN) side of this server cloud, is of as well as the software architecture itself and paramount importance for the software design. the integration of the Jack audio server. A During the service time of a single UDP stream proper operation of the JACK server, along- datagram, no concurrent stream datagrams can side two JACK clients, in this multiprocess- be received. Thus, the latencies of all streams ing environment could be shown, although a arriving on such an interface are accumulated. persisting buffer leak prevents significant jitter In addition to connecting the 60 streams to and latency measurements. A coarse assessment each other, the Soundjack cloud provides dig- shows however, that the operations are within ital signal processing algorithms for audio and reasonable bounds. -

Extremexos® Operating System
Data Sheet Highlights ExtremeXOS has a robust set of Layer 2 and Layer 3 control protocols, provides a flexible architecture for highly resilient networks and has been designed to support the nextgeneration Internet Protocol, IPv6. ExtremeXOS is a highly available and extensible software foundation for converged networks. ExtremeXOS offers high availability for carriergrade voice and video services over IP and for supporting mission- critical business applications such as CRM. • Modular Operating System • High Availability Architecture • Rich set of Layer-2 and Layer-3 ® protocols and features ExtremeXOS Operating System • Secure Network Access through role Version 16.2, 21.1, 22.7, and 30.4 based policy or Identity Management • Extensibility • Integrated Security with NetLogin, Overview MAC Security, IP Security Extreme Networks has created the ExtremeXOS modular Operating • User, location, and time-based System (OS) – for highly available, extensible, high-performance networks. dynamic security policies with ExtremeXOS high availability architecture with EAPS protocol helps reduce Identity Management network downtime for business continuity and access to mission-critical • Insight, control and automation for applications such as CRM, data warehouses and VoIP for carrier and voice virtualized data centers with XNV grade networks. (ExtremeXOS Network Virtualization) • Enhanced resiliency, Built-in security capabilities provide network access control integrated with synchronization, performance for endpoint integrity checking, identity management, and protection for the 2G/3G/4G mobile backhaul network control and management planes. • ExtremeXOS InSite SDK Software Defined Networking Ready with With ExtremeXOS you can extend the capabilities of your network by OpenFlow and OpenStack support integrating specialized application appliances such as security devices into • Ethernet Audio Video Bridging the network, providing insight and control at the network, application and (AVB) enabled user level. -
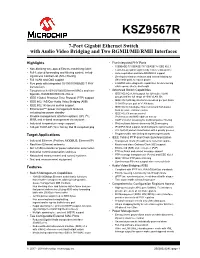
7-Port Gigabit Ethernet Switch with Audio Video Bridging and Two RGMII/MII/RMII Interfaces
KSZ9567R 7-Port Gigabit Ethernet Switch with Audio Video Bridging and Two RGMII/MII/RMII Interfaces Highlights • Five Integrated PHY Ports - 1000BASE-T/100BASE-TX/10BASE-Te IEEE 802.3 • Non-blocking wire-speed Ethernet switching fabric - Fast Link-up option significantly reduces link-up time • Full-featured forwarding and filtering control, includ- - Auto-negotiation and Auto-MDI/MDI-X support ing Access Control List (ACL) filtering - On-chip termination resistors and internal biasing for • Full VLAN and QoS support differential pairs to reduce power • Five ports with integrated 10/100/1000BASE-T PHY - LinkMD® cable diagnostic capabilities for determining transceivers cable opens, shorts, and length • Two ports with 10/100/1000 Ethernet MACs and con- • Advanced Switch Capabilities figurable RGMII/MII/RMII interfaces - IEEE 802.1Q VLAN support for 128 active VLAN • IEEE 1588v2 Precision Time Protocol (PTP) support groups and the full range of 4096 VLAN IDs - IEEE 802.1p/Q tag insertion/removal on per port basis • IEEE 802.1AS/Qav Audio Video Bridging (AVB) - VLAN ID on per port or VLAN basis • IEEE 802.1X access control support - IEEE 802.3x full-duplex flow control and half-duplex • EtherGreen™ power management features, back pressure collision control including low power standby - IEEE 802.1X access control 2 • Flexible management interface options: SPI, I C, (Port-based and MAC address based) MIIM, and in-band management via any port - IGMP v1/v2/v3 snooping for multicast packet filtering • Industrial temperature range support - IPv6 -

ORPHEUS Deliverable Template
Grant Agreement No.: 687645 Research and Innovation action Call Topic: H2020 ICT-19-2015 Object-based broadcasting – for European leadership in next generation audio experiences D4.1: Requirements for Representation, Archiving and Provision of Object-based Audio Version: v1.4 Deliverable type R (Document, report) Dissemination level PU (Public) Due date 01/06/2016 Submission date 17/06/2016 Lead editor Andreas Silzle (FHG) Authors Andrew Mason (BBC), Michael Meier (IRT), Simone Füg (FHG), Andreas Silzle (FHG) Reviewers Niels Bogaards (Elephantcandy), Halid Hrasnica (EURES) Work package, Task WP 4, T4.1, T4.2, and T4.3 Keywords File and streaming formats, BW64, meta data, ADM, MPEG-H Abstract This deliverable describes the requirements for representation, archiving and provision of object- based audio. Representation includes file and streaming formats for object-based audio. Provision is the distribution to end-user, including IP delivery, unicast streams and file downloads. For both file and streaming formats interoperable metadata have to be used. Among the requirements for the different formats are metadata support, existing standards, file size, compression, and support of advanced audio. The most important requirements for streaming formats are related to synchronization, existing standards, unicast and multicast transmission, latency, bitrate reduction, synchronization of audio signals, quality of service and specific requirements for streaming object- based audio metadata. Constrains and requirements of interoperability between -

Marvell® Link Street® 88E6341 Product Brief
Product Brief Marvell® Link Street® 88E6341 6 Port Ethernet Switch with 2500Base-X SerDes and Four 10/100/1000Mbps PHYs Overview The Marvell® Link Street® 88E6341 device is single-chip, 6-Port latest IEEE 802.1 Audio Video Bridging (AVB) identify and Ethernet Switch with four integrated 10/100/1000Mbps reserve the network resources for AVB/TSN traffic streams and Ethernet transceivers and one high speed SerDes interfaces supports precise isochronous streaming capability for reliable supporting 2500-BaseX, 1000Base-X, and SGMII. The device and quality audio/video transmission over Ethernet for today’s also includes an integrated microprocessor with internal real-time, high definition information and entertainment memory to enable smart or lightly managed switches without options. The AVB protocols enable timing sensitive streams the need of an external CPU. (such as digital video, audio, or industrial control traffic) to be sent over the Ethernet network with low latency and robust The high performance switch fabric provides line rate switching quality of Service guarantees. on all ports simultaneously while providing advanced switch functionality and QoS. The device includes a TCAM to enable flexible switch policing, including Access Control Lists (ACLs) and Policy Control Lists (PCLs). The 88E6341 also supports the Block Diagram TCAM CPU with RAM Packet Memory + MAC addr QoS Queue Controller 4-level QoS Per Port 802.1Qat SRP Aware Switching Engine AVB per Queue Ingress Shaping (802.1Qav/Qbv) AVB Policy 802.1AS IEEE 1588 Synchronous Ethernet 2.5Gbps/1Gbps RGMII/MII/RMII 4GE PHY SERDES/SGMII Key Features Features Benefits High performance, non-blocking, 6-port Ethernet Switch integrating: • Provides a complete Gigabit Ethernet switching solution for SOHO - Four 10/100/1000Mbps PHYs with Advanced Virtual Cable Tester routers and gateways. -

Netgear Prosafe Brochure
New Generation of ProSAFE® Gigabit Smart Switches Data Sheet GS716Tv3, GS724Tv4 and GS748Tv5 The NETGEAR® new generation of ProSAFE Gigabit Smart Switches offers new, powerful L2 and L2+ features with enhanced performance and usability. They are purposely designed for the future where increased traffic and application-oriented tasks demands more intelligence at the edge, higher realiability and improved network efficiency on top of operational cost savings and ease of management. There are three products in this series: a 16-port, a 24-port, and a 48-port Gigabit Ethernet Smart Switch. The GS716T and GS724T comes with 2 dedicated Gigabit SFP ports for fiber connectivity while GS748T comes with 2 combo SFP and 2 Dedicated SFP ports, all with increased number of simultaneously connected ports. This new generation of Gigabit Smart Switch from NETGEAR is the optimized solution providing the best value at an affordable SMB price point. Highlights Designed for Converged Network, Build a future-proof network with Network Development Made Easy Big or Small NETGEAR • Auto Voice VLAN for easy development of • Gigabit Speed with non-blocking • Solid performance with non-blocking VoIP architecture supporting 100% Gigabit architecture, 16K MAC addresses, 256 throughput VLANs, 100 shared ACL entries, 32static • Auto Video for simple deployment of IP routes, and 512 Multicast Groups Surveillance • Auto Voice VLAN for fast and reliable deployment of VoIP • Comprehensive IPv6 supporting • ACL Wizard for a guided tour to set up your management, QoS and -

M4250 Datasheet
Datasheet | M4250 series AV Line Managed Switches Switching Engineered for AV over IP Introducing the NETGEAR AV Line generally use 1Gbps or 10Gbps per Q-SYS and AES67 profiles are available, of M4250 Switches, developed and stream and the AV Line of M4250 targets as well as an AVB profile requiring an engineered for audio/video professionals the widespread 1Gbps codecs. AVB license sold separately. For video with dedicated service and support. PoE+, Ultra90 PoE++ and rear-facing ports the M4250 offers profiles for NVX, AMX, M4250 has been built from the ground ensure a clean integration in AV racks. Q-SYS, NDI, Dante etc. as well as audio/ up for the growing AV over IP market, M4250 switches come pre-configured for video/control mixed profiles. When combining years of networking expertise standard audio and video signals. When multiple switches are used, NETGEAR TM in AV with M4300 and M4500 series with requirements are more specific, an AV IGMP Plus brings automation for you to best practices from leading experts in user interface offers customization with just connect them together, or with M4300 the professional AV market. AV codecs port-based profiles. For audio Dante, and M4500 switches. Highlights Extended AV features • Built-in IT web GUI, console, telnet • Fully featured L2/L3/L4 platform for • Dedicated AV web-based GUI and SSH consistent with other midsize Enterprise campus networks, interface for more specific AV NETGEAR M4300 and M4500 series IoT and IPTV installations • Feature set includes static, RIP and PIM Industry standard -

Arista 7280E 10/40/100Gbe High Performance Switch Series
Data sheet Arista 7280E 10/40/ 100GbE High Performance Switch Series Overview All models in the 7280E series deliver rich Product highlights layer 2 and layer 3 features with wire speed performance up to 1.44 Terabits per second. Performance HPE and Arista share a common vision around • 7280SE‑64: 48 x 1/10GbE and 4 x the need to deliver secure hybrid IT solutions The Arista 7280E series offers a virtual 10/40GbE and experiences built on industry‑leading output queue architecture combined with • 7280SE‑68: 48 x 1/10GbE and 2 x software‑defined infrastructure—helping an ultra‑deep 9 GB of packet buffers that 100GbE customers to operate their workloads with eliminates head of line blocking and allows for lossless forwarding under sustained • 7280SE‑72: 48 x 1/10GbE and 2 x speed and agility to grow their business. This MXP partnership will provide our customers with congestion and the most demanding application loads. Combined with Arista EOS • Up to 1.44 terabits per second proven networking solutions that are superior to legacy alternatives and that complement the 7280E series delivers advanced features • Up to 900 million packets per second HPE compute, storage, virtualization, and for HPC, big data, content delivery, cloud, • Wire speed L2 and L3 forwarding cloud offerings. and virtualized environments. Data center optimized design • Ultra‑deep 9 GB packet buffer The Arista 7280E series are key components • Typical power under 4W per 10GbE of the Arista 7000 series portfolio of data Arista Extensible port center switches. The Arista 7280E series are Operating System (EOS) • 1 + 1 redundant and hot‑swappable purpose 10/40/100GbE fixed configuration power systems built for the highest performance The Arista 7280E runs the same Arista EOS • N + 1 redundant and hot‑swappable environments, where wire speed L2 and L3 software as all Arista products, simplifying fans forwarding are combined with advanced network administration. -

Audio Video Bridging Configuration Guide, Cisco IOS XE Gibraltar 16.10.X(Catalyst 9300 Switches) Americas Headquarters Cisco Systems, Inc
Audio Video Bridging Configuration Guide, Cisco IOS XE Gibraltar 16.10.x(Catalyst 9300 Switches) Americas Headquarters Cisco Systems, Inc. 170 West Tasman Drive San Jose, CA 95134-1706 USA http://www.cisco.com Tel: 408 526-4000 800 553-NETS (6387) Fax: 408 527-0883 © 2018 Cisco Systems, Inc. All rights reserved. CONTENTS CHAPTER 1 Audio Video Bridging 1 Introduction to Audio Video Bridging Networks 1 Information about Audio Video Bridging (AVB) 1 Licenses Supporting AVB 1 Benefits of AVB 2 Components of AVB Network 2 Supported SKUs for AVB 3 Information about Generalized Precision Time Protocol (gPTP) 4 Information about Multiple Stream Reservation Protocol (MSRP) 4 Functions of MSRP 4 Information about HQoS 5 Information about Multiple VLAN Registration Protocol (MVRP) 6 Configuring the AVB Network 6 Configuring AVB 6 Enabling AVB on the switch 6 Configuring AVB on the devices 7 Configuring gPTP 9 Enabling gPTP 9 Configuring the values of PTP clocks 11 Configuring HQoS 12 Enabling HQoS 12 Hierarchical QoS Policy Formats 12 Configuring MVRP 13 Enabling MVRP 13 Configuring MVRP on the switch interface 14 Monitoring the AVB Network 16 Audio Video Bridging Configuration Guide, Cisco IOS XE Gibraltar 16.10.x(Catalyst 9300 Switches) iii Contents Monitoring AVB 16 Monitoring gPTP 16 Monitoring MSRP 16 Monitoring HQoS 16 Monitoring MVRP 17 Examples of AVB Configurations and Monitoring 17 Examples for AVB 17 Examples for gPTP 20 Examples for MSRP 23 Examples for HQoS 26 Examples for MVRP 37 Feature Information for AVB 38 Audio Video Bridging Configuration -
Freescale Embedded Solutions Based on ARM Technology Guide
Embedded Solutions Based on ARM Technology Kinetis MCUs MAC5xxx MCUs i.MX applications processors QorIQ communications processors Vybrid controller solutions freescale.com/ARM ii Freescale Embedded Solutions Based on ARM Technology Table of Contents ARM Solutions Portfolio 2 i.MX Applications Processors 18 i.MX 6 series applications processors 20 Freescale Embedded Solutions Chart 4 i.MX53 applications processors 22 i.MX28 applications processors 23 Kinetis MCUs 6 Kinetis K series MCUs 7 i.MX and QorIQ Kinetis L series MCUs 9 Processor Comparison 24 Kinetis E series MCUs 11 Kinetis V series MCUs 12 Kinetis M series MCUs 13 QorIQ Communications Kinetis W series MCUs 14 Processors 25 Kinetis EA series MCUs 15 QorIQ LS1 family 26 QorIQ LS2 family 29 MAC5xxx MCUs 16 MAC57D5xx MCUs 17 Vybrid Controller Solutions 31 Vybrid VF3xx family 33 Vybrid VF5xx family 34 Vybrid VF6xx family 35 Design Resources 36 Freescale Enablement Solutions 37 Freescale Connect Partner Enablement Solutions 51 freescale.com/ARM 1 Scalable. Innovative. Leading. Your Number One Choice for ARM Solutions Freescale is the leader in embedded control, offering the market’s broadest and best-enabled portfolio of solutions based on ARM® technology. Our end-to-end portfolio of high-performance, power-efficient MCUs and digital networking processors help realize the potential of the Internet of Things, reflecting our unique ability to deliver scalable, systems- focused processing and connectivity. Our large ARM-powered portfolio includes enablement (software and tool) bundles scalable MCU and MPU families from small from Freescale and the extensive ARM ultra-low-power Kinetis MCUs to i.MX ecosystem.