Development of a Skateboarding Trick Classifier Using Accelerometry And
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Skate Park Safety Guidelines
SKATE PARK SAFETY GUIDELINES Table of Contents Published December 2000 COLORADO INTERGOVERNMENTAL RISK SHARING AGENCY 3665 Cherry Creek North Drive ● Denver, Colorado ● 80209 (303) 757-5475 ● (800) 228-7136 Visit us on the Internet at http://www.cirsa.org ©2000 I. Introduction …...……………………………………………………….………….……1 II. History of Skateboarding ..……….…………………………………….……….……...1 III. Injuries, Liability Exposures and Governmental Protection .………………….…....….1 IV. Getting Started, Plans, and Funding ……………………………………………..….…2 V. Location and Size …………………………………………………………….…..…....2 VI. Mixed Use .….…………………………………………………………….…….…..…3 VII. Lighting ..……………………………….……………………………….………..…....3 VIII. Construction ………………...……………………………….……………….……......3 IX. Signage ……………………………………………………………...….…….….……4 X. Fencing …………………………………………………………………………….….4 XI. Staffing ….…………………………………………………………………………….5 XII. Inspections and Maintenance …………………………………………………………5 XIII. Emergencies ……………………………………………………….………………….5 XIV. Claim Reporting ………………………………………………………………………5 XV. Appendix …………………………………………………………………...……..…..6 Surveys: Park Survey …………………………………………………………..…………7 Site Survey …………………………………………………………..……….…9 User Survey ……………………………………………………….….………..10 Sample Plan(s) ………………………………………….…………….………….….11 Waivers For Supervised Areas ………….…………………………….……….……12 Sources of Information ….……………………………………………..……….…...13 !2 SKATE PARK SAFETY GUIDELINES Skateboarding and inline skating have become increasingly popular recreational activities during the past decade. American Sports Data estimates there -
Skateboarding
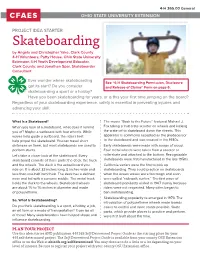
4-H 365.00 General OHIO STATE UNIVERSITY EXTENSION PROJECT IDEA STARTER Skateboarding by Angela and Christopher Yake, Clark County 4-H Volunteers; Patty House, Ohio State University Extension 4-H Youth Development Educator, Clark County; and Jonathan Spar, Skateboarder Consultant Ever wonder where skateboarding See “4-H Skateboarding Permission, Disclosure got its start? Do you consider and Release of Claims” Form on page 6. skateboarding a sport or a hobby? Have you been skateboarding for years, or is this your first time jumping on the board? Regardless of your skateboarding experience, safety is essential in preventing injuries and advancing your skill. What Is a Skateboard? The movie “Back to the Future” featured Michael J. When you look at a skateboard, what does it remind Fox taking a fruit crate scooter on wheels and kicking you of? Maybe a surfboard with four wheels. While the crate off to skateboard down the streets. This waves help guide a surfboard, the rider’s feet apparatus is commonly accepted as the predecessor help propel the skateboard. You can travel short to the skateboard and was created in the 1930s. distances on them, but most skateboards are used to Early skateboards were made with scraps of wood. perform stunts. Four metal wheels were taken from a scooter or Let’s take a closer look at the skateboard. Every rollerskate and attached to the bottom. Recognizable skateboard consists of three parts: the deck, the truck skateboards were first manufactured in the late 1950s. and the wheels. The deck is the actual board you California surfers were the first to pick up ride on. -

Enhancing Skateboarding Experience
MusiSkate: Enhancing Skateboarding Experience Part 4: Interface Evaluation & Design Team Name: The Crowdsourcerers Xiaowei (Ivy) Chen 903 143688 Sarthak Ghosh 903 048253 Lorina Navarro 903 145502 Pratik Shah 903 038262 Table of Contents Introduction Methodology Heuristic Evaluation Usability Testing Results and Analysis Freestyle Tricks for Tracks Overall comparison Rationale for Analysis methods Quantitative Analysis Qualitative analysis Design Changes Tricks for Tracks Freestyle Appendix 1 - Usability Study Script Appendix 2 - Evaluation Forms for Usability Study Appendix 3 - Screener Questions for the Usability Study Bibliography Introduction In this project, we wish to explore ways to encourage intermediate skaters to gain more skills by enhancing the skateboarding experience through rich audio feedback. Our target demographic are intermediate skaters, who have at least 1-5 years of skating experience. During our user research, we found out that learning how to skate can be significantly challenging for beginners. There are two aspects of learning that we uncovered that is relevant for skating: (a) learning by doing and (b) play. “Learning by doing” refers to the practice of trial-and-error, repetition and “feel” (e.g., experiencing the equipment) and watching others. “Play” refers to the feelings of “adrenaline rush”, control, “intrinsic interest” [1] and the creative process of performing tricks and exploiting affordances in their immediate environments. After weighing three design alternatives, our group decided to proceed with the concept “MusiSkate”, a skateboard that provides real-time musical feedback to pre-defined skating movements. This solution has the advantage of enhancing the user experience of skating through rich audio feedback, something that is demonstrated in other research [2]. -

So You Think You're As Good As the Dudes That Go on King of the Road? Well, Now's Your Time to Step Up: Thrasher Magazine'
So you think you’re aS good as the dudes that go on King of the Road? Well, now’s your time to step up: Thrasher magazine’s King of the Rad At-Home Challenge is your chance to bust and film the same tricks that the pros are trying to do on the King of the Road right now. The four skaters who land the most tricks and send us the footage win shoes for a year from Etnies, Nike SB, C1RCA, and Converse. You’ve got until the end of the King of the Road to post your clips—Monday, Oct 11th, at 11:59 pm. THE RULES King of the Rad Rules Contestants must film and edit their own videos The individual skater who earns the most points by landing and filming the most KOTR tricks, wins Hard tricks are worth 20 points Harder tricks are worth 30 points Hardest tricks are worth 50 points Fucked-Up tricks are worth 150 points (not available for some terrain) You can perform tricks from any category. The most points overall wins The top four skaters will be awarded the prize of free shoes for a year (that’s 12 pairs) from Nike SB, Converse, Etnies, and C1RCA All non-professional skaters are eligible to compete Deadline for posting footage is Oct. 11th, 11:59 pm Judging will be done by Jake Phelps, & acceptance of sketchy landings, etc will be at his discretion Meet the challenges to the best of your abilities and understanding. Any ambiguities in the wording of the challenges are unintentional. -

Individual and Community Culture at the Notorious Burnside Skatcpark Hames Ellerbe Universi
Socially Infamous Socially Infamous: Individual and Community Culture at the Notorious Burnside Skatcpark Hames Ellerbe University of Oregon A master's research project Presented to the Arts and Administration Program of the University of Oregon in partial fulfillment of the requirements for the Degree of Master of Science in Arts Administration Socially Infamous iii Approved by: Arts and Administration Program University of Oregon Socially Infamous V Abstract and Key Words Ahslracl This research project involves sociocultural validation of the founding members and early participants of Burnside Skatepark. The group developed socioculturally through the creation and use of an internationally renowned Do fl Yourse{l(DIY) skatepark. Located under the east side of the Burnside Bridge in Portland, Oregon and founded in 1990, Burnside Skatepark is one of the most famous skateparks in the world, infamous for territorialism, attitude, and difficulty. On the other hand, the park has been built with dedication, devoid ofcity funding and approval, in an area known, in the earlier days of the park, as a crime infested, former industrial district. Through the do ii yourselfcreation of Burnside skatepark, came the sociocultural cultivation and development of the founding participants and skaters. Additionally, the creation of the park provided substantial influence in the sociocultural development of a number of professional skateboarders and influenced the creation of parks worldwide. By identifying the sociocultural development and cultivation of those involved with the Burnside skatepark, specifically two of the founders, and one professional skateboarder, consideration can be provided into how skateboarding, creating a space, and skate participation may lead to significant development of community, social integrity, and self-worth even in the face of substantial gentrification. -

Lower Limb Force, Power and Performance in Skateboarding: an Exploratory Study
LOWER LIMB FORCE, POWER AND PERFORMANCE IN SKATEBOARDING: AN EXPLORATORY STUDY DRA. CLÁUDIA TARRAGÔ CANDOTTI Doutora em Ciências do Movimento Humano pela UFRGS e Professora Adjunta da UFRGS ministrando disciplinas na graduação (Educação Física e Fisioterapia) e no Programa de Pós-Graduação em Ciência do Movimento Humano – ESEF/UFRGS (Mestrado e Doutorado). E-mail: [email protected] DR. JEFFERSON FAGUNDES LOSS Doutor em Engenharia Mecânica pela UFRGS e Professor Associado da UFRGS ministrando disciplinas na graduação (Educação Física, Fisioterapia e Enfermagem) e no Programa de Pós- Graduação em Ciência do Movimento Humano – ESEF/UFRGS (Mestrado e Doutorado). E-mail: [email protected] GRAD. RÉVISSON ESTEVES SILVA Graduado em Educação Física pela Universidade do Vale do Rio dos Sinos. E-mail: [email protected] MS. MÔNICA DE OLIVEIRA MELO Doutoranda em Ciências do Movimento Humano pelo Programa de Pós-Graduação em Ciências do Movimento, da Universidade Federal do Rio Grande do Sul. Graduada em Educação Física pela Universidade do Vale do Rio dos Sinos. Professora da Universidade de Caxias do Sul ministrando disciplinas na graduação de Educação Física. Membro do Núcleo de Pesquisa em Artes e Ciências do Movimento Humano da Universidade da Universidade de Caxias do Sul E-mail: [email protected] GRAD. RICARDO BARRETO TEIXEIRA Graduado em Educação Física pela Universidade do Vale do Rio dos Sinos. E-mail: [email protected] GRAD. GUSTAVO BECKER DELWING Graduado em Educação Física pela Universidade do Vale do Rio dos Sinos. E-mail: [email protected] MS. MATIAS NOLL Mestre em Ciências do Movimento Humano pelo Programa de Pós-Graduação em Ciências do Movimento Humano, da Universidade Federal do Rio Grande do Sul. -
Resource Guide 4
WILLIAM D. CANNON AR T G A L L E R Y TABLE OF CONTENTS Steps of the Three-Part-Art Gallery Education Program 3 How to Use This Resource Guide 4 Making the Most of Your Gallery Visit 5 The Artful Thinking Program 7 Curriculum Connections 8 About the Exhibition 10 About Street Skateboarding 11 Artist Bios 13 Pre-visit activities 33 Lesson One: Emphasizing Color 34 Post-visit activities 38 Lesson Two: Get Bold with Design 39 Lesson Three: Use Text 41 Classroom Extensions 43 Glossary 44 Appendix 53 2 STEPS OF THE THREE-PART-ART GALLERY EDUCATION PROGRAM Resource Guide: Classroom teachers will use the preliminary lessons with students provided in the Pre-Visit section of the Full Deck: A Short History of Skate Art resource guide. On return from your field trip to the Cannon Art Gallery the classroom teacher will use Post-Visit Activities to reinforce learning. The guide and exhibit images were adapted from the Full Deck: A Short History of Skate Art Exhibition Guide organized by: Bedford Gallery at the Lesher Center for the Arts, Walnut Creek, California. The resource guide and images are provided free of charge to all classes with a confirmed reservation and are also available on our website at www.carlsbadca.gov/arts. Gallery Visit: At the gallery, an artist educator will help the students critically view and investigate original art works. Students will recognize the differences between viewing copies and seeing works first and learn that visiting art galleries and museums can be fun and interesting. Hands-on Art Project: An artist educator will guide the students in a hands-on art project that relates to the exhibition. -
Skateboarding As Transportation: Findings from an Exploratory Study
Portland State University PDXScholar Dissertations and Theses Dissertations and Theses Spring 11-27-2013 Skateboarding as Transportation: Findings from an Exploratory Study Tessa Walker Portland State University Follow this and additional works at: https://pdxscholar.library.pdx.edu/open_access_etds Part of the Sports Studies Commons, Urban, Community and Regional Planning Commons, and the Urban Studies and Planning Commons Let us know how access to this document benefits ou.y Recommended Citation Walker, Tessa, "Skateboarding as Transportation: Findings from an Exploratory Study" (2013). Dissertations and Theses. Paper 1505. https://doi.org/10.15760/etd.1515 This Thesis is brought to you for free and open access. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. Skateboarding as Transportation: Findings from an Exploratory Study by Tessa Walker A thesis submitted in partial fulfillment of the requirements for the degree of Master of Urban Studies Thesis Committee: Jennifer Dill, Chair David Morgan Kelly Clifton Portland State University 2013 © 2013 Tessa Walker 2 Abstract In recent decades skateboarding has expanded from recreation into a form of transportation. Skateboarders appear to use roadways much as other non‐ motorized modes do. However, there is little academic research on the needs and characteristics of the skateboard as a mode. This research reports demographics, multi‐modal and travel behavior findings, and other data from an exploratory mixed‐methods study of skateboarding as a mode of transportation. i For the skaters who showed me the familiar city as a new and different landscape. -

Project 2 Process Book
PROJECT 2 PROCESS BOOK 01 02 03 04 05 06 William Golden The man behind the CBS eye and brand identity. Who he was and how his work changed advertising and corporate identity forever. Rogue Stoppard Digital Media Design 1 CONtent breakdown 01 02 03 04 05 06 Biography CBS Portfolio Early Life Corporate Identity Work before CBS Early Work Advertising CBS Wife - Cipe Pineles Impacts Other Organization Some sort of timeline in a non-conventional way Slideshow for work goals & strategIES 01 02 03 04 05 06 Visual Goals User Goals Strategies Clean layout Digestable quickly Demonstrate Golden’s: Simple information delivery Easy to use Style & Simplicity Bold style Quick scroll through AND his impact BRAIn- storming 01 02 03 04 05 06 Free Write William Golden pratically invented coporoate identity through his design and advertisement crossover work with CBS. Television was a booming industry at the moment and it was important to create a recognizeable system for a brand or company. Through his black and white, bold imagery with complimentary text in small columns interacting with the images he creates a very unique and bold look. His eye logo and the feeling it gives viewers and consumers is essen- tial to the brand. This sense of voyeurism and sort of hypnotic trance that televi- sion seems to put people in is absolutley communicated through his logo design. Not only does he use the logo professionally he also made a huge impact on the word of television, design, and advertisement. BRAIn- storming 01 02 03 04 05 06 William Golden Loud Submarine -

How to Manual in Skateboard
How to manual in skateboard click here to download How to Manual on a Skateboard. A manual is type of freestyle skateboarding trick that's very similar to a "wheelie" on a bike. To perform a manual, you shift your. Learning to manual on your skateboard isn't all that hard; it just takes balance and lots of practice. Learn how to do a manual with this tutorial. This is a web tutorial for Manual a skateboarding trick in which you keep going only with back wheels. It comes with understandable movie and image. How to Manual on a skateboard. A balance in which you ride on both rear wheels, with your front wheels raised off the ground. This trick is best practiced on a. Check out Simons skateboarding trick tips and other help for beginning skateboarders. Learn how to ollie, kickflip, heelflip, manual as well as other skate tricks. Manual. Manual - aka a wheelie. Rolling on the back two wheels of the skateboard. A fun trick that requires a lot of balance. Hold the manual as long as you can. manual trick tip, learn how to manual. The manual or wheely is a balance trick where you ride on your back wheels for as long . Learn to skateboard Manual. In One Foot Manuals the rider places one foot parallel to the board and balances on the nose or tail. A Manual in which both feet are. im doing photo shoot in front of the store where i need to gap to the street and www.doorway.ru the heck do i manual? Recently i've gotten a sudden urge to do manual tricks because they look really cool to me. -

PRINTER of the YEAR YEAR the of PRINTER Jay • INTEGRATED WORKFLOW PRINTER of the • • 11"
8 1/4" GRAPHIC MONTHLY CANADA GRAPHIC MONTHLY VOLUME 32 NUMBER 6 $7.00 DECEMBER 2012 • PRINTER PRINTER OF THE YEAR Jay • INTEGRATED WORKFLOW WORKFLOW INTEGRATED PRINTER OF THE • 11" PRINT WORLD WRAP-UP WORLD PRINT YEAR + MAKING THE WORK FLOW CJ30214 PrinterYear.indd 1 13-03-25 10:21 PM PofY_2012_final_Layout 1 13-02-13 2:05 PM Page 20 JAY MANDARINO PRINTER of the YEAR CJ30214 PrinterYear.indd 2 13-03-25 10:21 PM PofY_2012_final_Layout 1 13-02-13 2:05 PM Page 21 FEATURESTORY by JEF CATAPANG SEE JAY JUMP The lessons he learned on the ramps and rails keep Mandarino on top of his printing game JAY MANDARINO, THE MAN behind C.J. Graphics Printers and Lithographers, is weaving through the equip- ment on the production floor of the company’s digital plant in western Toronto. A Xerox iGen is humming on the left and Jay stops for a second to pick up a sheet that comes sliding out, then puts it down, then quickly snaps it up again for re- examination. He zooms past a couple of Océ machines, crack- ing wise with a few employees. Now he’s scooting past two laser die cutters with dynamic red Zund logos, giving feed- back about an opened curtain that should always stay drawn. Zip zip zip. He halts to show off the scenery and soak in the atmos- phere. “Machines are cool,” he says, grinning. Then he’s off again. He’s been at work since 5:30 a.m. If you’ve met Jay, you won’t be surprised to hear that he has attention deficit hyperactive disorder. -

IMU-Based Trick Classification in Skateboarding
IMU-based Trick Classification in Skateboarding Benjamin H. Groh Thomas Kautz Dominik Schuldhaus [email protected] [email protected] [email protected] Bjoern M. Eskofier bjoern.eskofi[email protected] Digital Sports Group, Pattern Recognition Lab Friedrich-Alexander University Erlangen-Nürnberg (FAU), Germany ABSTRACT can find its application for non-professional skateboarders The popularity of skateboarding continuously grows for ath- by providing feedback about their trick performance. letes performing the sport and for spectators following com- For the development of a trick-detection and classification petitions. The presentation and the assessment of the ath- system, sophisticated pattern recognition procedures are nec- letes' performance can be supported by state-of-the-art mo- essary. These methods are applied to the motion data which tion analysis and pattern recognition methods. In this pa- are often acquired by inertial measurement units (IMU). In per, we present a trick classification analysis based on mo- contrast to video-based methods, IMUs do not require any tion data of inertial measurement units. Six tricks were per- external equipment and the acquisition is not confined to a formed by seven skateboarders. A trick event detection algo- specified area. rithm and four different classification methods were applied The first known approach to apply pattern recognition meth- to the collected data. A sensitivity of the event detection ods to skateboarding was proposed by Anlauff et al. [2]. of 94.2 % was achieved. The classification of correctly de- They developed a real-time skateboarding game Tilt 'n' Roll tected trick events provides an accuracy of 97.8 % for the for a Nokia N900 smartphone.