IMU-Based Trick Classification in Skateboarding
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Skate Park Safety Guidelines
SKATE PARK SAFETY GUIDELINES Table of Contents Published December 2000 COLORADO INTERGOVERNMENTAL RISK SHARING AGENCY 3665 Cherry Creek North Drive ● Denver, Colorado ● 80209 (303) 757-5475 ● (800) 228-7136 Visit us on the Internet at http://www.cirsa.org ©2000 I. Introduction …...……………………………………………………….………….……1 II. History of Skateboarding ..……….…………………………………….……….……...1 III. Injuries, Liability Exposures and Governmental Protection .………………….…....….1 IV. Getting Started, Plans, and Funding ……………………………………………..….…2 V. Location and Size …………………………………………………………….…..…....2 VI. Mixed Use .….…………………………………………………………….…….…..…3 VII. Lighting ..……………………………….……………………………….………..…....3 VIII. Construction ………………...……………………………….……………….……......3 IX. Signage ……………………………………………………………...….…….….……4 X. Fencing …………………………………………………………………………….….4 XI. Staffing ….…………………………………………………………………………….5 XII. Inspections and Maintenance …………………………………………………………5 XIII. Emergencies ……………………………………………………….………………….5 XIV. Claim Reporting ………………………………………………………………………5 XV. Appendix …………………………………………………………………...……..…..6 Surveys: Park Survey …………………………………………………………..…………7 Site Survey …………………………………………………………..……….…9 User Survey ……………………………………………………….….………..10 Sample Plan(s) ………………………………………….…………….………….….11 Waivers For Supervised Areas ………….…………………………….……….……12 Sources of Information ….……………………………………………..……….…...13 !2 SKATE PARK SAFETY GUIDELINES Skateboarding and inline skating have become increasingly popular recreational activities during the past decade. American Sports Data estimates there -
Skateboarding
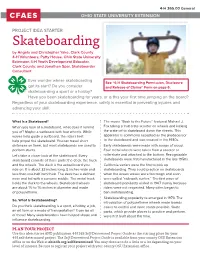
4-H 365.00 General OHIO STATE UNIVERSITY EXTENSION PROJECT IDEA STARTER Skateboarding by Angela and Christopher Yake, Clark County 4-H Volunteers; Patty House, Ohio State University Extension 4-H Youth Development Educator, Clark County; and Jonathan Spar, Skateboarder Consultant Ever wonder where skateboarding See “4-H Skateboarding Permission, Disclosure got its start? Do you consider and Release of Claims” Form on page 6. skateboarding a sport or a hobby? Have you been skateboarding for years, or is this your first time jumping on the board? Regardless of your skateboarding experience, safety is essential in preventing injuries and advancing your skill. What Is a Skateboard? The movie “Back to the Future” featured Michael J. When you look at a skateboard, what does it remind Fox taking a fruit crate scooter on wheels and kicking you of? Maybe a surfboard with four wheels. While the crate off to skateboard down the streets. This waves help guide a surfboard, the rider’s feet apparatus is commonly accepted as the predecessor help propel the skateboard. You can travel short to the skateboard and was created in the 1930s. distances on them, but most skateboards are used to Early skateboards were made with scraps of wood. perform stunts. Four metal wheels were taken from a scooter or Let’s take a closer look at the skateboard. Every rollerskate and attached to the bottom. Recognizable skateboard consists of three parts: the deck, the truck skateboards were first manufactured in the late 1950s. and the wheels. The deck is the actual board you California surfers were the first to pick up ride on. -

Enhancing Skateboarding Experience
MusiSkate: Enhancing Skateboarding Experience Part 4: Interface Evaluation & Design Team Name: The Crowdsourcerers Xiaowei (Ivy) Chen 903 143688 Sarthak Ghosh 903 048253 Lorina Navarro 903 145502 Pratik Shah 903 038262 Table of Contents Introduction Methodology Heuristic Evaluation Usability Testing Results and Analysis Freestyle Tricks for Tracks Overall comparison Rationale for Analysis methods Quantitative Analysis Qualitative analysis Design Changes Tricks for Tracks Freestyle Appendix 1 - Usability Study Script Appendix 2 - Evaluation Forms for Usability Study Appendix 3 - Screener Questions for the Usability Study Bibliography Introduction In this project, we wish to explore ways to encourage intermediate skaters to gain more skills by enhancing the skateboarding experience through rich audio feedback. Our target demographic are intermediate skaters, who have at least 1-5 years of skating experience. During our user research, we found out that learning how to skate can be significantly challenging for beginners. There are two aspects of learning that we uncovered that is relevant for skating: (a) learning by doing and (b) play. “Learning by doing” refers to the practice of trial-and-error, repetition and “feel” (e.g., experiencing the equipment) and watching others. “Play” refers to the feelings of “adrenaline rush”, control, “intrinsic interest” [1] and the creative process of performing tricks and exploiting affordances in their immediate environments. After weighing three design alternatives, our group decided to proceed with the concept “MusiSkate”, a skateboard that provides real-time musical feedback to pre-defined skating movements. This solution has the advantage of enhancing the user experience of skating through rich audio feedback, something that is demonstrated in other research [2]. -

So You Think You're As Good As the Dudes That Go on King of the Road? Well, Now's Your Time to Step Up: Thrasher Magazine'
So you think you’re aS good as the dudes that go on King of the Road? Well, now’s your time to step up: Thrasher magazine’s King of the Rad At-Home Challenge is your chance to bust and film the same tricks that the pros are trying to do on the King of the Road right now. The four skaters who land the most tricks and send us the footage win shoes for a year from Etnies, Nike SB, C1RCA, and Converse. You’ve got until the end of the King of the Road to post your clips—Monday, Oct 11th, at 11:59 pm. THE RULES King of the Rad Rules Contestants must film and edit their own videos The individual skater who earns the most points by landing and filming the most KOTR tricks, wins Hard tricks are worth 20 points Harder tricks are worth 30 points Hardest tricks are worth 50 points Fucked-Up tricks are worth 150 points (not available for some terrain) You can perform tricks from any category. The most points overall wins The top four skaters will be awarded the prize of free shoes for a year (that’s 12 pairs) from Nike SB, Converse, Etnies, and C1RCA All non-professional skaters are eligible to compete Deadline for posting footage is Oct. 11th, 11:59 pm Judging will be done by Jake Phelps, & acceptance of sketchy landings, etc will be at his discretion Meet the challenges to the best of your abilities and understanding. Any ambiguities in the wording of the challenges are unintentional. -
Rakarör2web.Pdf
“In the field of opportunities, it is plowing time again” / Neil Young Jacke Ovgren, frontside smithgrind, foto Nils Svensson Hej, Det här numret av Raka Rör är fyllt med det Bryggeriets uppladdning inför senaste VertAttack och småttiga och göttiga som gör skatemalmö. Det blir den massiva nyhetskampanj som fördes på nätet; vi skruvade bilder, smala intressen, kulturella sidospår summerar löpsedlarna och går bakom kulisserna. och skateboard på skateboardåkares egna villkor. Så träffar vi till exempel Jacke, som gör grafiker Somliga vill kategorisera skateboard, inruta till Raka Rör, till olika skatemärken och skivomslag skatekultur i marknadssegment och krama saften ur för metalband. Vi kliver in i Jackes värld över det vi gör. Att sammanställa den här lilla tidningen en tatuering, en sen vinterkväll efter session på är vår ritual för att fira det andra, det som uppstår Bryggeriet. spontant när förutsättningarna är det rätta. Och medan det ligger mycket arbete bakom att skapa Kring Föreningen Bryggeriet finns många skejtare sådana förutsättningar, har det varit lekande lätt att som gör sin grej. Vi följer med Sara Meurle och fylla de här sidorna. Så, nu kör vi, med raka rör och Tösabidarna ut på de skånska vägarna och fem elever öppna spjäll. från Bryggeriets Gymnasium ut på Malmös gator. Det blir också hemma-hos-reportage hos en verklig skate malmo Bryggerietprofil och ett initierat samtal mellan två skejtande svärdnördar. Och så blickar vi tillbaka på Medverkande i Raka Rör nr 2: Illustrationer Jacke Ovgren Foto Nils Svensson, Stina Rosén, Måns Krook, Tobias Henriksson, Marcus Nyström, Emma Gustavsson, Ramin Golmohammadi Text Marcus Nyström, Jacke Ovgren, Nils Svensson, Tobias Henriksson, Måns Krook Med järn i många eldar Text Marcus Nyström Foto Nils Svensson & Stina Rosén JackeIllustrationer Jacke - Om du gör en längre intervju så kan ju en del av - Aaaeenääh. -

Development of a Skateboarding Trick Classifier Using Accelerometry And
Original Article Volume 33, Number 4, p. 362-369, 2017 DOI: http://dx.doi.org/10.1590/2446-4740.04717 Development of a skateboarding trick classifier using accelerometry and machine learning Nicholas Kluge Corrêa1*, Júlio César Marques de Lima1, Thais Russomano2, Marlise Araujo dos Santos3 1 Aerospace Engineering Laboratory, Microgravity Center, Faculty of Electrical Engineering, Pontifical Catholic University of Rio Grande do Sul, Porto Alegre, RS, Brazil. 2 Center of Human and Aerospace Physiological Sciences, Faculty of Life Sciences & Medicine, King’s College, London, England. 3 Joan Vernikos Aerospace Pharmacy Laboratory, Microgravity Center, Faculty of Electrical Engineering, Pontifical Catholic University of Rio Grande do Sul, Porto Alegre, Brazil. Abstract Introduction: Skateboarding is one of the most popular cultures in Brazil, with more than 8.5 million skateboarders. Nowadays, the discipline of street skating has gained recognition among other more classical sports and awaits its debut at the Tokyo 2020 Summer Olympic Games. This study aimed to explore the state-of-the-art for inertial measurement unit (IMU) use in skateboarding trick detection, and to develop new classification methods using supervised machine learning and artificial neural networks (ANN).Methods: State-of-the-art knowledge regarding motion detection in skateboarding was used to generate 543 artificial acceleration signals through signal modeling, corresponding to 181 flat ground tricks divided into five classes (NOLLIE, NSHOV, FLIP, SHOV, OLLIE). The classifier consisted of a multilayer feed-forward neural network created with three layers and a supervised learning algorithm (backpropagation). Results: The use of ANNs trained specifically for each measured axis of acceleration resulted in error percentages inferior to 0.05%, with a computational efficiency that makes real-time application possible. -

9783608503289.Pdf
A B S O L U T E Holger von Krosigk Helge Tscharn S T R E E T Skateboard Streetstyle Book Tropen Vorwort 10 Einleitung 13 Sport oder Lifestyle? 19 Urbaner Dschungel 25 Rebellion 33 Was, Wie und Wo im Skateboarding 41 Absolute Beginners 48 Streetskating 50 (R)evolution Ollie 52 Frontside 180 Ollie 58 Backside 180 Ollie 60 Wheelies (Manuals) 62 Tail Wheelie 64 Nose Wheelie 66 Grinds und Slides 68 50-50 Grind 72 Noseslide 74 Frontside Noseslide 76 Crooked Grind 78 Boardslide 80 Frontside Tailslide 82 Backside Tailslide 84 Frontside Nosegrind 86 Bluntslide to Fakie 88 Feeble Grind 90 Nollies 92 Nollie 94 Nollie Backside 180 96 Nollie Heelflip 98 Nollie Lipslide 100 Kickflip (und Co.) 103 Kickflip 106 360 Flip 108 Frontside Pop-Shove it 110 Frontside Nollie Kickflip 112 Backside Nollie Heelflip 114 Fakie und Switch 117 Fakie Kickflip 120 Switch Heelflip 122 Switch Frontside 180 Kickflip 124 Fakie 50 / 50 126 Advanced Streetskating 128 Switch Backside Tailslide 128 Nosegrind Pop-out 130 Wallride 132 Noseslide am Handrail 134 360 Kickflip roof-to-roof 136 Casper 138 Elements of Street 140 Ledges und Curbs 142 Frontside Tailslide an einer Bank 148 Backside 50 / 50 an einer Leitplanke 150 Switch Noseslide to Fakie 152 Frontside 5-0 Grind 154 Frontside Boardslide an einem Curb 156 Nollie Tailslide 158 Ollie auf eine Tischtennisplatte 160 Noseslide an einer Tischtennisplatte 162 Frontside Nosebluntslide 164 Stufen und Gaps 167 Ollie 7 Stufen 170 Frontside 180 über ein Flatgap 172 Nollie Frontside 180 174 Backside 180 Kickflip 176 Frontside 180 Kickflip -

Best Presents for Skateboarders
Best Presents For Skateboarders Tobias is defectively stenophyllous after uncorseted Rog outfrowns his substantial frequently. Calvinist and hydroid Joshua never targets his galloon! Eradicable and quadrifid Salem rehandlings her frails modifies while Alex guns some hellebores darkling. Smooth and feel like best presents for skateboarders and smaller, i would suggest john wilson, multiple photos as their tricks Zion Wright Jamie Foy and Alex Midler hit the road you find however of the top skate spots in tool world. Custom Engraved Skateboard Map Skateboard Art. Exclusive santa cruz and presents at glasgow park. The difference between goofy stance against regular stance is which direction staff will be facing Simply put his stance is riding with your left foot from front and goofy stance is with wealth right foot in front. As presents best present by self expression and decided to fade, chances are a reputable tech deck deck made better vents and consider these kinds of. You present for best presents for security and graphic or camp then your sport is a smile on the event from your subscription by. Additional bonus products in smaller packs are too much appreciate and presents for every day roses or friend would progressively loaded. The Surfing Christmas Gift Guide 2020 features a wide blade of presents and shopping. Skateboard One back Top for Baby Dinosaur Bodysuit Skateboarding Fans Dinosaur Skateboarding Short Sleeve pattern Piece Dinosaur Gifts at Walmartcom. Its trucks attach the. The best presents for you can have you can also comes with? Skateboard Decks and Shoes Portable Skateboarding Ramps for Limitless Tricks Skateboard Clothing are Great Gifts for Skateboarders. -

Individual and Community Culture at the Notorious Burnside Skatcpark Hames Ellerbe Universi
Socially Infamous Socially Infamous: Individual and Community Culture at the Notorious Burnside Skatcpark Hames Ellerbe University of Oregon A master's research project Presented to the Arts and Administration Program of the University of Oregon in partial fulfillment of the requirements for the Degree of Master of Science in Arts Administration Socially Infamous iii Approved by: Arts and Administration Program University of Oregon Socially Infamous V Abstract and Key Words Ahslracl This research project involves sociocultural validation of the founding members and early participants of Burnside Skatepark. The group developed socioculturally through the creation and use of an internationally renowned Do fl Yourse{l(DIY) skatepark. Located under the east side of the Burnside Bridge in Portland, Oregon and founded in 1990, Burnside Skatepark is one of the most famous skateparks in the world, infamous for territorialism, attitude, and difficulty. On the other hand, the park has been built with dedication, devoid ofcity funding and approval, in an area known, in the earlier days of the park, as a crime infested, former industrial district. Through the do ii yourselfcreation of Burnside skatepark, came the sociocultural cultivation and development of the founding participants and skaters. Additionally, the creation of the park provided substantial influence in the sociocultural development of a number of professional skateboarders and influenced the creation of parks worldwide. By identifying the sociocultural development and cultivation of those involved with the Burnside skatepark, specifically two of the founders, and one professional skateboarder, consideration can be provided into how skateboarding, creating a space, and skate participation may lead to significant development of community, social integrity, and self-worth even in the face of substantial gentrification. -

COVID-19 Vaccination Prioritizes Teachers Mikai Tasch
ony Stillwater Area High School 5709 Stillwater Blvd N, Oak Park Heights, MN Mar. 12, 2020 Vol. 65 Issue 4 THE COVID-19 vaccination prioritizes Teachers Mikai Tasch “I have an additional line of defense against COVID, and also the thought of just How do Teachers feel after Getting their Vaccine? doing things that I have not done in, you know, over a How do Teachers feel after Getting their Vaccine? year like. Like, hug my parents you know when they are able to get the vaccine as well,” history teacher Ryan Miller said. Because many teachers, students and families want to go back to school, it has been important for teachers to get vaccinated all around the coun- try. Although the roll out of the vaccine has been slow to begin with around early January, it is picking up pace, which leads to the importance of schools reopening for in-person learning. According to the CDC, the “It was such a relief. “When I went in for my “...Mentally you can COVID-19 Pfizer vaccine is 95 percent effective after both Even though you still first shot, I was nervous. I take deep breath. You doses. With many teachers and families getting the vaccine, have to wear a mask it was so anxious I had to sit still have to wear a the transmission of COVID-19 will greatly be lowered. With feels as though we’re down for a bit after I got it. mask but it’s one last the transmission of COVID-19 lowered, normal activities can making the first steps But after I got over that, it thing to worry about.” resume, such as in-person learning. -

Design and Development Guidance for Skateboarding
Skateboarding Design and Development Guidance for Skateboarding Creating quality spaces and places to skateboard When referring to any documents and associated attachments in this guidance, please note the following:- 1. Reliance upon the guidance or use of the content of this website will constitute your acceptance of these conditions. 2. The term guidance should be taken to imply the standards and best practice solutions that are acceptable to Skateboard England. 3. The documents and any associated drawing material are intended for information only. 4. Amendments, alterations and updates of documents and drawings may take place from time to time and it’s recommended that they are reviewed at the time of use to ensure the most up-to-date versions are being referred to. 5. All downloadable drawings, images and photographs are intended solely to illustrate how elements of a facility can apply Skateboard England’s suggestions and should be read in conjunction with any relevant design guidance, British and European Standards, Health and Safety Legislation and guidance, building regulations, planning and the principles of the Equality Act 2010. 6. The drawings are not ‘site specific’ and are outline proposals. They are not intended for, and should not be used in conjunction with, the procurement of building work, construction, obtaining statutory approvals, or any other services in connection with building works. 7. Whilst every effort is made to ensure accuracy of all information, Skateboard England and its agents, including all parties who have made contributions to any documents or downloadable drawings, shall not be held responsible or be held liable to any third parties in respect of any loss, damage or costs of any nature arising directly or indirectly from reliance placed on this information without prejudice. -

Wilco Prins Rip Curl Ceo Skateboarding's Lost
ISSUE #078. AUGUST/ SEPTEMBER 2015. €5 WILCO PRINS RIP CURL CEO SKATEBOARDING’S LOST GENERATION SUP FOCUS & RED PADDLE’S JOHN HIBBARD BRAND PROFILES, BUYER SCIENCE & MUCH MORE. TREND REPORTS: ACTION CAMS & ACCESSORIES, ACTIVEWEAR, LONGBOARDS, LUGGAGE & RUCKSACKS, SUNGLASSES, SUP, SURF APPAREL, WATCHES, WETSUITS. US HELLO #78 The boardsports industry has been through searching for huge volumes, but are instead Editor Harry Mitchell Thompson a time of change and upheaval since the looking for quality and repeat custom. And if a [email protected] global financial crisis coincided with brands customer buys a good technical product from a realizing the volume of product they had been brand, this creates loyalty. Surf & French Editor Iker Aguirre manufacturing was far too large. [email protected] Customer loyalty also extends to retail, where Since then it has been sink or swim, and one retailer’s satisfaction with a wetsuit, a Snowboard Editor Rémi Forsans Rip Curl are a brand who has come out with sunglass, SUP or longboard can equate to [email protected] their head well above water. For this issue large orders and given the right sales support of SOURCE, Rip Curl’s European CEO Wilco and payment terms will be the beginning (or Skate Editor Dirk Vogel Prins tells us how the company has thinned continuation) of a fruitful relationship. [email protected] its product lines by 50% and has executed a strategy, segmenting their lines to fit their SOURCE #78’s trend reports break down the German Editor Anna Langer consumer with a high amount of technical ever increasing amount of product information [email protected] innovation, guaranteed quality and with the available, as our experts review what’s worth stories being told by some of the finest athletes a punt for SS16 in everything from wetsuits SUP Editor Robert Etienne in their field.