Performance Evaluation of Power-Line Communication Systems for LIN-Bus Based Data Transmission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

3 Characterization of Communication Signals and Systems
63 3 Characterization of Communication Signals and Systems 3.1 Representation of Bandpass Signals and Systems Narrowband communication signals are often transmitted using some type of carrier modulation. The resulting transmit signal s(t) has passband character, i.e., the bandwidth B of its spectrum S(f) = s(t) is much smaller F{ } than the carrier frequency fc. S(f) B f f f − c c We are interested in a representation for s(t) that is independent of the carrier frequency fc. This will lead us to the so–called equiv- alent (complex) baseband representation of signals and systems. Schober: Signal Detection and Estimation 64 3.1.1 Equivalent Complex Baseband Representation of Band- pass Signals Given: Real–valued bandpass signal s(t) with spectrum S(f) = s(t) F{ } Analytic Signal s+(t) In our quest to find the equivalent baseband representation of s(t), we first suppress all negative frequencies in S(f), since S(f) = S( f) is valid. − The spectrum S+(f) of the resulting so–called analytic signal s+(t) is defined as S (f) = s (t) =2 u(f)S(f), + F{ + } where u(f) is the unit step function 0, f < 0 u(f) = 1/2, f =0 . 1, f > 0 u(f) 1 1/2 f Schober: Signal Detection and Estimation 65 The analytic signal can be expressed as 1 s+(t) = − S+(f) F 1{ } = − 2 u(f)S(f) F 1{ } 1 = − 2 u(f) − S(f) F { } ∗ F { } 1 The inverse Fourier transform of − 2 u(f) is given by F { } 1 j − 2 u(f) = δ(t) + . -

2 the Wireless Channel
CHAPTER 2 The wireless channel A good understanding of the wireless channel, its key physical parameters and the modeling issues, lays the foundation for the rest of the book. This is the goal of this chapter. A defining characteristic of the mobile wireless channel is the variations of the channel strength over time and over frequency. The variations can be roughly divided into two types (Figure 2.1): • Large-scale fading, due to path loss of signal as a function of distance and shadowing by large objects such as buildings and hills. This occurs as the mobile moves through a distance of the order of the cell size, and is typically frequency independent. • Small-scale fading, due to the constructive and destructive interference of the multiple signal paths between the transmitter and receiver. This occurs at the spatialscaleoftheorderofthecarrierwavelength,andisfrequencydependent. We will talk about both types of fading in this chapter, but with more emphasis on the latter. Large-scale fading is more relevant to issues such as cell-site planning. Small-scale multipath fading is more relevant to the design of reliable and efficient communication systems – the focus of this book. We start with the physical modeling of the wireless channel in terms of elec- tromagnetic waves. We then derive an input/output linear time-varying model for the channel, and define some important physical parameters. Finally, we introduce a few statistical models of the channel variation over time and over frequency. 2.1 Physical modeling for wireless channels Wireless channels operate through electromagnetic radiation from the trans- mitter to the receiver. -

Contents More Information
Cambridge University Press 978-0-521-51630-3 - Practical Digital Wireless Signals Earl McCune Table of Contents More information Contents Preface page xvii Definitions and acronyms xx Terminology and notation xxv 1 Keying, states, and block diagram construction 1 1.1 Radio communications: what really happens? 2 1.2 Modulation states: “keyed” 3 1.3 DWC signal representations 6 1.3.1 “Digital” modulations of an analog signal 6 1.3.2 Polar representation 6 1.3.3 Quadrature representation 7 1.3.4 Transformations between signal representations 9 1.4 Frequency domain representations 11 1.5 Implementing a DWC system 13 1.5.1 Symbol construction 13 1.5.2 Symbol-to-signal-state mapping 14 1.5.3 State transitions 15 1.5.4 Modulator 17 1.5.5 Power amplifier (PA) 17 1.5.6 Radio front-end 18 Simplex 18 Duplex 19 Duplexer vs. diplexer 20 References 22 For further reading 22 2 Common issues and signal characterization 23 2.1 Power spectral density (PSD) 23 2.2 Occupied bandwidth 28 2.2.1 Useful signal-bandwidth measures 29 Bounded power-spectral-density (B-PSD) bandwidth 29 Fractional power-containment bandwidth 31 Transmitter mask 33 © in this web service Cambridge University Press www.cambridge.org Cambridge University Press 978-0-521-51630-3 - Practical Digital Wireless Signals Earl McCune Table of Contents More information viii Contents 2.2.2 Bad signal-bandwidth measures 33 Null-to-null bandwidth 33 Equivalent white-noise signal bandwidth (ENSB) 34 2.3 Bandlimiting filtering 35 2.3.1 Exact vs. -

The Future of Passive Multiplexing & Multiplexing Beyond
The Future of Passive Multiplexing & Multiplexing Beyond 10G From 1G to 10G was easy But Beyond 10G? 1G CWDM/DWDM 10G CWDM/DWDM 25G 40G Dark Fiber Passive Multiplexer 100G ? 400G Ingredients for Multiplexing 1) Dark Fiber 2) Multiplexers 3) Light : Transceivers Ingredients for Multiplexing 1) Dark Fiber 2 Multiplexer 3 Light + Transceiver Dark Fiber Attenuation → 0 km → → 40 km → → 80 km → Dispersion → 0 km → → 40 km → → 80 km → Dark Fiber Dispersion @1G DWDM max 200km → 0 km → → 40 km → → 80 km → @10G DWDM max 80km → 0 km → → 40 km → → 80 km → @25G DWDM max 15km → 0 km → → 40 km → → 80 km → Dark Fiber Attenuation → 80 km → 1310nm Window 1550nm/DWDM Dispersion → 80 km → Ingredients for Multiplexing 1 Dark FiBer 2) Multiplexers 3 Light + Transceiver Passive Mux Multiplexers 2 types • Cascaded TFF • AWG 95% of all Communication -Larger Multiplexers such as 40Ch/96Ch Multiplexers TFF: Thin film filter • Metal or glass tuBes 2cm*4mm • 3 fiBers: com / color / reflect • Each tuBe has 0.3dB loss • 95% of Muxes & OADM Multiplexers ABS casing Multiplexers AWG: arrayed wave grading -Larger muxes such as 40Ch/96Ch -Lower loss -Insertion loss 40ch = 3.0dB DWDM33 Transmission Window AWG Gaussian Fit Attenuation DWDM33 Low attenuation Small passband Reference passBand DWDM33 Isolation Flat Top Higher attenuation Wide passband DWDM light ALL TFF is Flat top Transmission Wave Types Flat Top: OK DWDM 10G Coherent 100G Gaussian Fit not OK DWDM PAM4 Ingredients for Multiplexing 1 Dark FiBer 2 Multiplexer 3) Light: Transceivers ITU Grids LWDM DWDM CWDM Attenuation -

Passband Data Transmission I Introduction in Digital Passband
Passband Data Transmission I References Phase-shift keying Chapter 4.1-4.3, S. Haykin, Communication Systems, Wiley. J.1 Introduction In baseband pulse transmission, a data stream represented in the form of a discrete pulse-amplitude modulated (PAM) signal is transmitted over a low- pass channel. In digital passband transmission, the incoming data stream is modulated onto a carrier with fixed frequency and then transmitted over a band-pass channel. J.2 1 Passband digital transmission allows more efficient use of the allocated RF bandwidth, and flexibility in accommodating different baseband signal formats. Example Mobile Telephone Systems GSM: GMSK modulation is used (a variation of FSK) IS-54: π/4-DQPSK modulation is used (a variation of PSK) J.3 The modulation process making the transmission possible involves switching (keying) the amplitude, frequency, or phase of a sinusoidal carrier in accordance with the incoming data. There are three basic signaling schemes: Amplitude-shift keying (ASK) Frequency-shift keying (FSK) Phase-shift keying (PSK) J.4 2 ASK PSK FSK J.5 Unlike ASK signals, both PSK and FSK signals have a constant envelope. PSK and FSK are preferred to ASK signals for passband data transmission over nonlinear channel (amplitude nonlinearities) such as micorwave link and satellite channels. J.6 3 Classification of digital modulation techniques Coherent and Noncoherent Digital modulation techniques are classified into coherent and noncoherent techniques, depending on whether the receiver is equipped with a phase- recovery circuit or not. The phase-recovery circuit ensures that the local oscillator in the receiver is synchronized to the incoming carrier wave (in both frequency and phase). -
MODEM Revision
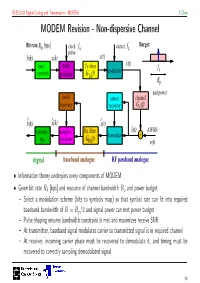
ELEC3203 Digital Coding and Transmission – MODEM S Chen MODEM Revision - Non-dispersive Channel Burget: Bit rate:Rb [bps] clock fs carrier fc pulse b(k) x(k) x(t) bits / pulse Tx filter s(t) modulator fc symbols generator GTx (f) Bp and power clock carrier channel recovery recovery G c (f) b(k)^ x(k)^ x(t)^ symbols / sampler / Rx filter s(t)^ AWGN demodulat + bits decision GRx (f) n(t) digital baseband analogue RF passband analogue • Information theory underpins every components of MODEM • Given bit rate Rb [bps] and resource of channel bandwidth Bp and power budget – Select a modulation scheme (bits to symbols map) so that symbol rate can fit into required baseband bandwidth of B = Bp/2 and signal power can met power budget – Pulse shaping ensures bandwidth constraint is met and maximizes receive SNR – At transmitter, baseband signal modulates carrier so transmitted signal is in required channel – At receiver, incoming carrier phase must be recovered to demodulate it, and timing must be recovered to correctly sampling demodulated signal 94 ELEC3203 Digital Coding and Transmission – MODEM S Chen MODEM Revision - Dispersive Channel • For dispersive channel, equaliser at receiver aims to make combined channel/equaliser a Nyquist system again + = bandwidth bandwidth channel equaliser combined – Design of equaliser is a trade off between eliminating ISI and not enhancing noise too much • Generic framework of adaptive equalisation with training and decision-directed modes n[k] x[k] y[k] f[k] x[k−k^ ] Σ equaliser decision d channel circuit − Σ -

An Elementary Approach Towards Satellite Communication
AN ELEMENTARY APPROACH TOWARDS SATELLITE COMMUNICATION Prof. Dr. Hari Krishnan GOPAKUMAR Prof. Dr. Ashok JAMMI AN ELEMENTARY APPROACH TOWARDS SATELLITE COMMUNICATION Prof. Dr. Hari Krishnan GOPAKUMAR Prof. Dr. Ashok JAMMI AN ELEMENTARY APPROACH TOWARDS SATELLITE COMMUNICATION WRITERS Prof. Dr. Hari Krishnan GOPAKUMAR Prof. Dr. Ashok JAMMI Güven Plus Group Consultancy Inc. Co. Publications: 06/2021 APRIL-2021 Publisher Certificate No: 36934 E-ISBN: 978-605-7594-89-1 Güven Plus Group Consultancy Inc. Co. Publications All kinds of publication rights of this scientific book belong to GÜVEN PLUS GROUP CONSULTANCY INC. CO. PUBLICATIONS. Without the written permission of the publisher, the whole or part of the book cannot be printed, broadcast, reproduced or distributed electronically, mechanically or by photocopying. The responsibility for all information and content in this Book, visuals, graphics, direct quotations and responsibility for ethics / institutional permission belongs to the respective authors. In case of any legal negativity, the institutions that support the preparation of the book, especially GÜVEN PLUS GROUP CONSULTANCY INC. CO. PUBLISHING, the institution (s) responsible for the editing and design of the book, and the book editors and other person (s) do not accept any “material and moral” liability and legal responsibility and cannot be taken under legal obligation. We reserve our rights in this respect as GÜVEN GROUP CONSULTANCY “PUBLISHING” INC. CO. in material and moral aspects. In any legal problem/situation TURKEY/ISTANBUL courts are authorized. This work, prepared and published by Güven Plus Group Consultancy Inc. Co., has ISO: 10002: 2014- 14001: 2004-9001: 2008-18001: 2007 certificates. This work is a branded work by the TPI “Turkish Patent Institute” with the registration number “Güven Plus Group Consultancy Inc. -

Analysis of the PAPR Behavior of the OFDM Passband Signal
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 19 December 2019 doi:10.20944/preprints201912.0255.v1 Article Analysis of the PAPR Behavior of the OFDM Passband Signal Frank Andrés Eras 0000-0002-7844-5670, Italo Alexander Carreño, Thomas Borja, Diego Javier Reinoso* 0000-0003-0854-1250, Luis Felipe Urquiza 0000-0002-6405-2067, Martha Cecilia Paredes 0000-0001-5789-4568 Departamento de Electrónica, Telecomunicaciones y Redes de Información, Escuela Politécnica Nacional * Correspondence: [email protected] 1 Abstract: Orthogonal Frequency Division Multiplexing (OFDM) is a technique widely used in today’s 2 wireless communication systems due to its ability to combat the effects of multi-path in the signal. 3 However, one of the main limitations of the use of OFDM is its high Peak-to-Average Power Ratio 4 (PAPR), which reduces the efficiency of the OFDM system. The effects of PAPR can produce both 5 out-of-band and in-band radiation, which degrades the signal by increasing the bit error rate (BER), 6 this occurs in both baseband and bandpass sginals. In this document the effect of the PAPR in a 7 OFDM passband signal is analyzed considering the implementation of a High Power Amplifier (HPA) 8 and the Simple Amplitude Predistortion-Orthogonal Pilot Sequences (OPS-SAP) scheme to reduce 9 the PAPR. 10 Keywords: OFDM; PAPR; passband; IEEE 802.11p 11 1. Introduction 12 For some years, many wireless communication systems have based the transmission of 13 information on the Orthogonal Frequency Division Multiplexing (OFDM) scheme, which is used 14 in standards such as Long-Term Evolution (LTE), Wireless Local Area Networks (WLAN), Digital 15 Video Broadcasting (DVB-T), among others. -

Quantum Key Distribution for 10 Gb/S Dense Wavelength Division Multiplexing Networks K
Quantum key distribution for 10 Gb/s dense wavelength division multiplexing networks K. A. Patel,1,2 J. F. Dynes,1 M. Lucamarini,1 I. Choi,1 A. W. Sharpe,1 Z. L. Yuan,1 R. V. Penty2 and A. J. Shields1 1Toshiba Research Europe Limited, Cambridge Research Laboratory, 208 Cambridge Science Park, Milton Road, Cambridge, CB4 0GZ, United Kingdom 2Cambridge University Engineering Department, 9 J J Thomson Avenue, Cambridge, CB3 0FA, United Kingdom Abstract: We demonstrate quantum key distribution (QKD) with bidirectional 10 Gb/s classical data channels in a single fiber using dense wavelength division multiplexing. Record secure key rates of 2.38 Mbps and fiber distances up to 70 km are achieved. Data channels are simultaneously monitored for error-free operation. The robustness of QKD is further demonstrated with a secure key rate of 445 kbps over 25 km, obtained in the presence of data lasers launching conventional 0 dBm power. We discuss the fundamental limit for the QKD performance in the multiplexing environment. 1 Quantum key distribution (QKD)1 is revolutionizing the way of distributing secret cryptographic keys for information protection. Unlike its classical counterparts, it allows secure transmission of information with quantifiable security2-4 and detection of an eavesdropper. After numerous experiments in the laboratory4-7 as well as in field,8,9 the technology has matured for deployment on dark fiber with secure key rates exceeding 1 Mb/s. Nevertheless, for wider adoption, QKD must adapt to existing fiber infrastructures, which are populated with classical data communications. Quantum and classical data signals can be combined onto a single fiber using wavelength division multiplexing. -

Fundamentals of Spread-Spectrum Techniques
RGHEFF CH003.tex 13/6/2007 17: 33 Page 153 3 Fundamentals of spread-spectrum techniques In this chapter we consider the spread-spectrum transmission schemes that demand channel bandwidth much greater than is required by the Nyquist sampling theorem. You will recall from Chapter 2 that the minimum bandpass bandwidth required for data transmission through an ideal channel is equal to the data symbol rate.You will also recall that wideband reception allows a large amount of input noise power to the detector and thus degrades the quality of the detected data. Therefore, the receivers for spread-spectrum schemes have to convert the received wideband signals back to their original narrowband waveforms before detection. This process generates a certain amount of processing gain that can be used to combat radio jamming and interference. We will describe and discuss in detail the properties and methods of generation of the functions used in creating wide spectrum signals. Finally, we consider the multiple access properties of the spread-spectrum systems and outline the analytical model for evaluating the system performance. 3.1 Historical background There was intensive use of communications warfare during World War II. This technique outlined the ability to intercept and interfere with hostile communications. Consequently, this procedure stimulated a great deal of interest which led to the development of secure communications systems and work in this field was carried out on two fronts. Firstly, development in communication theory initiated encryption schemes (Shannon, 1949) to provide certain information protection. Secondly, work was initiated to harness the devel- opment of a new technology. -

Advances in Radio Science (2004) 2: 127–133 © Copernicus Gmbh 2004 Advances in Radio Science
Advances in Radio Science (2004) 2: 127–133 © Copernicus GmbH 2004 Advances in Radio Science Link budget comparison of different mobile communication systems based on EIRP and EISL G. Fischer1, F. Pivit2, and W. Wiebeck2 1Lucent Technologies, Bell Labs Advanced Technologies, Thurn-und-Taxis-Straße 10, 90411 Nuremberg, Germany 2Institut fur¨ Hochstfrequenztechnik¨ und Elektronik, Universitat¨ Karlsruhe, Kaiserstraße 12, 76128 Karlsruhe, Germany Abstract. The metric EISL (Equivalent Isotropic Sensitiv- Figure 1 illustrates the great variety of mobile communi- ity Level) describing the effective sensitivity level usable at cation systems and their evolution steps. A major evolution the air interface of a mobile or a basestation is used to com- step is a migration from so-called second generation systems pare mobile communication systems either based on time di- (2G) like IS136-TDMA (Time Division Multiple Access) vision or code division multiple access in terms of coverage and GSM (Global System for Mobile communication) to- and emission characteristics. It turns out that systems that wards third generation systems (3G, IMT2000 systems) like organize the multiple access by different codes rather than UMTS and CDMA2000 (Code Division Multiple Access). different timeslots run at less emission and offer greater cov- EDGE (Enhanced Data rates through GSM Evolution) is not erage. considered a 3G system here, because it is not able to of- fer Quality of Service (QoS) control, what is mandated with 3G systems by the ITU (International Telecommunications Union). A further evolution of EDGE called GERAN (GSM 1 Introduction EDGE Radio Access Network) will be able to offer that, but this standard doesn’t have a wide acceptance yet. -

Quadrature Amplitude Modulation (QAM)
Quadrature Amplitude Modulation (QAM) PAM signals occupy twice the bandwidth required for the baseband Transmit two PAM signals using carriers of the same frequency but in phase and quadrature Demodulation: QAM Transmitter Implementation QAM is widely used method for transmitting digital data over bandpass channels A basic QAM transmitter Inphase component Pulse a Impulse a*(t) a(t) n Shaping Modulator + d Map to Filter sin w t n Serial to c Constellation g (t) s(t) Parallel T Point * Pulse 1 Impulse b (t) b(t) Shaping - J Modulator bn Filter quadrature component gT(t) cos wct Using complex notation = − = ℜ s(t) a(t)cos wct b(t)sin wct s(t) {s+ (t)} which is the preenvelope of QAM ∞ ∞ − = + − jwct = jwckT − jwc (t kT ) s+ (t) (ak jbk )gT (t kT )e s+ (t) (ck e )gT (t kT)e −∞ −∞ Complex Symbols Quadriphase-Shift Keying (QPSK) 4-QAM Transmitted signal is contained in the phase imaginary imaginary real real M-ary PSK QPSK is a special case of M-ary PSK, where the phase of the carrier takes on one of M possible values imaginary real Pulse Shaping Filters The real pulse shaping g (t) filter response T = jwct = + Let h(t) gT (t)e hI (t) jhQ (t) = hI (t) gT (t)cos wct = where hQ (t) gT (t)sin wct = − This filter is a bandpass H (w) GT (w wc ) filter with the frequency response Transmitted Sequences Modulated sequences before passband shaping ' = ℜ jwc kT = − ak {ck e } ak cos wc kT bk sin wc kT ' = ℑ jwc kT = + bk {ck e } ak sin wc kT bk cos wc kT Using these definitions ∞ = ℜ = ' − − ' − s(t) {s+ (t)} ak hI (t kT) bk hQ (t kT)