Cognitive Computational Neuroscience
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Creation of Neuroscience
The Creation of Neuroscience The Society for Neuroscience and the Quest for Disciplinary Unity 1969-1995 Introduction rom the molecular biology of a single neuron to the breathtakingly complex circuitry of the entire human nervous system, our understanding of the brain and how it works has undergone radical F changes over the past century. These advances have brought us tantalizingly closer to genu- inely mechanistic and scientifically rigorous explanations of how the brain’s roughly 100 billion neurons, interacting through trillions of synaptic connections, function both as single units and as larger ensem- bles. The professional field of neuroscience, in keeping pace with these important scientific develop- ments, has dramatically reshaped the organization of biological sciences across the globe over the last 50 years. Much like physics during its dominant era in the 1950s and 1960s, neuroscience has become the leading scientific discipline with regard to funding, numbers of scientists, and numbers of trainees. Furthermore, neuroscience as fact, explanation, and myth has just as dramatically redrawn our cultural landscape and redefined how Western popular culture understands who we are as individuals. In the 1950s, especially in the United States, Freud and his successors stood at the center of all cultural expla- nations for psychological suffering. In the new millennium, we perceive such suffering as erupting no longer from a repressed unconscious but, instead, from a pathophysiology rooted in and caused by brain abnormalities and dysfunctions. Indeed, the normal as well as the pathological have become thoroughly neurobiological in the last several decades. In the process, entirely new vistas have opened up in fields ranging from neuroeconomics and neurophilosophy to consumer products, as exemplified by an entire line of soft drinks advertised as offering “neuro” benefits. -

Cognitive Science 1
Cognitive Science 1 • Linguistics, Minor (https://e-catalogue.jhu.edu/arts-sciences/full- COGNITIVE SCIENCE time-residential-programs/degree-programs/cognitive-science/ linguistics-minor/) http://www.cogsci.jhu.edu For current course information and registration go to https://sis.jhu.edu/ Cognitive science is the study of the human mind and brain, focusing on classes/ how the mind represents and manipulates knowledge and how mental representations and processes are realized in the brain. Conceiving of the mind as an abstract computing device instantiated in the brain, Courses cognitive scientists endeavor to understand the mental computations AS.050.102. Language and Mind. 3 Credits. underlying cognitive functioning and how these computations are Introductory course dealing with theory, methods, and current research implemented by neural tissue. Cognitive science has emerged at the topics in the study of language as a component of the mind. What it is interface of several disciplines. Central among these are cognitive to "know" a language: components of linguistic knowledge (phonetics, psychology, linguistics, and portions of computer science and artificial phonology, morphology, syntax, semantics) and the course of language intelligence; other important components derive from work in the acquisition. How linguistic knowledge is put to use: language and the neurosciences, philosophy, and anthropology. This diverse ancestry brain and linguistic processing in various domains. has brought into cognitive science several different perspectives and Area: Natural Sciences, Social and Behavioral Sciences methodologies. Cognitive scientists endeavor to unite such varieties AS.050.105. Introduction to Cognitive Neuropsychology. 3 Credits. of perspectives around the central goal of characterizing the structure When the brain is damaged or fails to develop normally, even the most of human intellectual functioning. -

The Baseline Structure of the Enteric Nervous System and Its Role in Parkinson’S Disease
life Review The Baseline Structure of the Enteric Nervous System and Its Role in Parkinson’s Disease Gianfranco Natale 1,2,* , Larisa Ryskalin 1 , Gabriele Morucci 1 , Gloria Lazzeri 1, Alessandro Frati 3,4 and Francesco Fornai 1,4 1 Department of Translational Research and New Technologies in Medicine and Surgery, University of Pisa, 56126 Pisa, Italy; [email protected] (L.R.); [email protected] (G.M.); [email protected] (G.L.); [email protected] (F.F.) 2 Museum of Human Anatomy “Filippo Civinini”, University of Pisa, 56126 Pisa, Italy 3 Neurosurgery Division, Human Neurosciences Department, Sapienza University of Rome, 00135 Rome, Italy; [email protected] 4 Istituto di Ricovero e Cura a Carattere Scientifico (I.R.C.C.S.) Neuromed, 86077 Pozzilli, Italy * Correspondence: [email protected] Abstract: The gastrointestinal (GI) tract is provided with a peculiar nervous network, known as the enteric nervous system (ENS), which is dedicated to the fine control of digestive functions. This forms a complex network, which includes several types of neurons, as well as glial cells. Despite extensive studies, a comprehensive classification of these neurons is still lacking. The complexity of ENS is magnified by a multiple control of the central nervous system, and bidirectional communication between various central nervous areas and the gut occurs. This lends substance to the complexity of the microbiota–gut–brain axis, which represents the network governing homeostasis through nervous, endocrine, immune, and metabolic pathways. The present manuscript is dedicated to Citation: Natale, G.; Ryskalin, L.; identifying various neuronal cytotypes belonging to ENS in baseline conditions. -

A Revised Computational Neuroanatomy for Motor Control
This is the author’s final version; this article has been accepted for publication in the Journal of Cognitive Neuroscience 1 A Revised Computational Neuroanatomy for Motor Control 2 Shlomi Haar1, Opher Donchin2,3 3 1. Department of BioEngineering, Imperial College London, UK 4 2. Department of Biomedical Engineering, Ben-Gurion University of the Negev, Israel 5 3. Zlotowski Center for Neuroscience, Ben-Gurion University of the Negev, Israel 6 7 Corresponding author: Shlomi Haar ([email protected]) 8 Imperial College London, London, SW7 2AZ, UK 9 10 Acknowledgements: We would like to thank Ilan Dinstein, Liad Mudrik, Daniel Glaser, Alex Gail, and 11 Reza Shadmehr for helpful discussions about the manuscript. Shlomi Haar is supported by the Royal 12 Society – Kohn International Fellowship (NF170650). Work on this review was partially supported by 13 DFG grant TI-239/16-1. 14 15 Abstract 16 We discuss a new framework for understanding the structure of motor control. Our approach 17 integrates existing models of motor control with the reality of hierarchical cortical processing and the 18 parallel segregated loops that characterize cortical-subcortical connections. We also incorporate the recent 19 claim that cortex functions via predictive representation and optimal information utilization. Our 20 framework assumes each cortical area engaged in motor control generates a predictive model of a different 21 aspect of motor behavior. In maintaining these predictive models, each area interacts with a different part 22 of the cerebellum and basal ganglia. These subcortical areas are thus engaged in domain appropriate 23 system identification and optimization. This refocuses the question of division of function among different 24 cortical areas. -
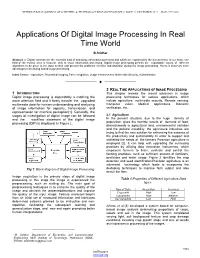
Applications of Digital Image Processing in Real Time World
INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH VOLUME 8, ISSUE 12, DECEMBER 2019 ISSN 2277-8616 Applications Of Digital Image Processing In Real Time World B.Sridhar Abstract :-- Digital contents are the essential kind of analyzing, information perceived and which are explained by the human brain. In our brain, one third of the cortical area is focused only to visual information processing. Digital image processing permits the expandable values of different algorithms to be given to the input section and prevent the problems of noise and distortion during the image processing. Hence it deserves more advantages than analog based image processing. Index Terms:-- Agriculture, Biomedical imaging, Face recognition, image enhancement, Multimedia Security, Authentication —————————— —————————— 2 REAL TIME APPLICATIONS OF IMAGE PROCESSING 1 INTRODUCTION This chapter reviews the recent advances in image Digital image processing is dependably a catching the processing techniques for various applications, which more attention field and it freely transfer the upgraded include agriculture, multimedia security, Remote sensing, multimedia data for human understanding and analyzing Computer vision, Medical applications, Biometric of image information for capacity, transmission, and verification, etc,. representation for machine perception[1]. Generally, the stages of investigation of digital image can be followed 2.1 Agriculture and the workflow statement of the digital image In the present situation, due to the huge density of population, gives the horrible results of demand of food, processing (DIP) is displayed in Figure 1. diminishments in agricultural land, environmental variation and the political instability, the agriculture industries are trying to find the new solution for enhancing the essence of the productivity and sustainability.―In order to support and satifisfied the needs of the farmers Precision agriculture is employed [2]. -

Visual Cortex in Humans 251
Author's personal copy Visual Cortex in Humans 251 Visual Cortex in Humans B A Wandell, S O Dumoulin, and A A Brewer, using fMRI, and we discuss the main features of the Stanford University, Stanford, CA, USA V1 map. We then summarize the positions and proper- ties of ten additional visual field maps. This represents ã 2009 Elsevier Ltd. All rights reserved. our current understanding of human visual field maps, although this remains an active field of investigation, with more maps likely to be discovered. Finally, we Human visua l cortex comprises 4–6 billion neurons that are organ ized into more than a dozen distinct describe theories about the functional purpose and functional areas. These areas include the gray matter organizing principles of these maps. in the occi pital lobe and extend into the temporal and parietal lobes . The locations of these areas in the The Size and Location of Human Visual intact human cortex can be identified by measuring Cortex visual field maps. The neurons within these areas have a variety of different stimulus response proper- The entirety of human cortex occupies a surface area 2 ties. We descr ibe how to measure these visual field on the order of 1000 cm and ranges between 2 and maps, their locations, and their overall organization. 4 mm in thickness. Each cubic millimeter of cortex contains approximately 50 000 neurons so that neo- We then consider how information about patterns, objects, color s, and motion is analyzed and repre- cortex in the two hemispheres contain on the order of sented in these maps. -
Reliability in Cognitive Neuroscience: a Meta-Meta-Analysis Books Written by William R
Reliability in Cognitive Neuroscience: A Meta-Meta-Analysis Books Written by William R. Uttal Real Time Computers: Techniques and Applications in the Psychological Sciences Generative Computer Assisted Instruction (with Miriam Rogers, Ramelle Hieronymus, and Timothy Pasich) Sensory Coding: Selected Readings (Editor) The Psychobiology of Sensory Coding Cellular Neurophysiology and Integration: An Interpretive Introduction. An Autocorrelation Theory of Form Detection The Psychobiology of Mind A Taxonomy of Visual Processes Visual Form Detection in 3-Dimensional Space Foundations of Psychobiology (with Daniel N. Robinson) The Detection of Nonplanar Surfaces in Visual Space The Perception of Dotted Forms On Seeing Forms The Swimmer: An Integrated Computational Model of a Perceptual-Motor System (with Gary Bradshaw, Sriram Dayanand, Robb Lovell, Thomas Shepherd, Ramakrishna Kakarala, Kurt Skifsted, and Greg Tupper) Toward A New Behaviorism: The Case against Perceptual Reductionism Computational Modeling of Vision: The Role of Combination (with Ramakrishna Kakarala, Sriram Dayanand, Thomas Shepherd, Jaggi Kalki, Charles Lunskis Jr., and Ning Liu) The War between Mentalism and Behaviorism: On the Accessibility of Mental Processes The New Phrenology: On the Localization of Cognitive Processes in the Brain A Behaviorist Looks at Form Recognition Psychomyths: Sources of Artifacts and Misrepresentations in Scientifi c Cognitive neuroscience Dualism: The Original Sin of Cognitivism Neural Theories of Mind: Why the Mind-Brain Problem May Never Be Solved Human Factors in the Courtroom: Mythology versus Science The Immeasurable Mind: The Real Science of Psychology Time, Space, and Number in Physics and Psychology Distributed Neural Systems: Beyond the New Phrenology Neuroscience in the Courtroom: What Every Lawyer Should Know about the Mind and the Brain Mind and Brain: A Critical Appraisal of Cognitive Neuroscience Reliability in Cognitive Neuroscience: A Meta-Meta-Analysis Reliability in Cognitive Neuroscience: A Meta-Meta-Analysis William R. -

A Distributed Computational Cognitive Model for Object Recognition
SCIENCE CHINA xx xxxx Vol. xx No. x: 1{15 doi: A Distributed Computational Cognitive Model for Object Recognition Yong-Jin Liu1∗, Qiu-Fang Fu2, Ye Liu2 & Xiaolan Fu2 1Tsinghua National Laboratory for Information Science and Technology, Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China, 2State Key Lab of Brain and Cognitive Science, Institute of Psychology, Chinese Academy of Sciences, Beijing 100101, China Received Month Day, Year; accepted Month Day, Year Abstract Based on cognitive functionalities in human vision processing, we propose a computational cognitive model for object recognition with detailed algorithmic descriptions. The contribution of this paper is of two folds. Firstly, we present a systematic review on psychological and neurophysiological studies, which provide collective evidence for a distributed representation of 3D objects in the human brain. Secondly, we present a computational model which simulates the distributed mechanism of object vision pathway. Experimental results show that the presented computational cognitive model outperforms five representative 3D object recognition algorithms in computer science research. Keywords distributed cognition, computational model, object recognition, human vision system 1 Introduction Object recognition is one of fundamental tasks in computer vision. Many recognition algorithms have been proposed in computer science area (e.g., [1, 2, 3, 4, 5]). While the CPU processing speed can now be reached at 109 Hz, the human brain has a limited speed of 100 Hz at which the neurons process their input. However, compared to state-of-the-art computational algorithms for object recognition, human brain has a distinct advantage in object recognition, i.e., human being can accurately recognize one from unlimited variety of objects within a fraction of a second, even if the object is partially occluded or contaminated by noises. -
Health Informatics Principles
Health Informatics Principles Foundational Curriculum: Cluster 4: Informatics Module 7: The Informatics Process and Principles of Health Informatics Unit 2: Health Informatics Principles FC-C4M7U2 Curriculum Developers: Angelique Blake, Rachelle Blake, Pauliina Hulkkonen, Sonja Huotari, Milla Jauhiainen, Johanna Tolonen, and Alpo Vӓrri This work is produced by the EU*US eHealth Work Project. This project has received funding from the European Union’s Horizon 2020 research and 21/60 innovation programme under Grant Agreement No. 727552 1 EUUSEHEALTHWORK Unit Objectives • Describe the evolution of informatics • Explain the benefits and challenges of informatics • Differentiate between information technology and informatics • Identify the three dimensions of health informatics • State the main principles of health informatics in each dimension This work is produced by the EU*US eHealth Work Project. This project has received funding from the European Union’s Horizon 2020 research and FC-C4M7U2 innovation programme under Grant Agreement No. 727552 2 EUUSEHEALTHWORK The Evolution of Health Informatics (1940s-1950s) • In 1940, the first modern computer was built called the ENIAC. It was 24.5 metric tonnes (27 tons) in volume and took up 63 m2 (680 sq. ft.) of space • In 1950 health informatics began to take off with the rise of computers and microchips. The earliest use was in dental projects during late 50s in the US. • Worldwide use of computer technology in healthcare began in the early 1950s with the rise of mainframe computers This work is produced by the EU*US eHealth Work Project. This project has received funding from the European Union’s Horizon 2020 research and FC-C4M7U2 innovation programme under Grant Agreement No. -

The Place of Modeling in Cognitive Science
The place of modeling in cognitive science James L. McClelland Department of Psychology and Center for Mind, Brain, and Computation Stanford University James L. McClelland Department of Psychology Stanford University Stanford, CA 94305 650-736-4278 (v) / 650-725-5699 (f) [email protected] Running Head: Modeling in cognitive science Keywords: Modeling frameworks, computer simulation, connectionist models, Bayesian approaches, dynamical systems, symbolic models of cognition, hybrid models, cognitive architectures Abstract I consider the role of cognitive modeling in cognitive science. Modeling, and the computers that enable it, are central to the field, but the role of modeling is often misunderstood. Models are not intended to capture fully the processes they attempt to elucidate. Rather, they are explorations of ideas about the nature of cognitive processes. As explorations, simplification is essential – it is only through simplification that we can fully understand the implications of the ideas. This is not to say that simplification has no downsides; it does, and these are discussed. I then consider several contemporary frameworks for cognitive modeling, stressing the idea that each framework is useful in its own particular ways. Increases in computer power (by a factor of about 4 million) since 1958 have enabled new modeling paradigms to emerge, but these also depend on new ways of thinking. Will new paradigms emerge again with the next 1,000-fold increase? 1. Introduction With the inauguration of a new journal for cognitive science, thirty years after the first meeting of the Cognitive Science Society, it seems essential to consider the role of computational modeling in our discipline. -

The Davida Teller Award Lecture, 2016 Visual Brain Development: A
Journal of Vision (2017) 17(3):26, 1–24 1 The Davida Teller Award Lecture, 2016 Visual Brain Development: A review of ‘‘Dorsal Stream Vulnerability’’—motion, mathematics, amblyopia, actions, and attention # Janette Atkinson University College London, London, UK $ Research in the Visual Development Unit on ‘‘dorsal stream vulnerability’ (DSV) arose from research in two Introduction somewhat different areas. In the first, using cortical milestones for local and global processing from our neurobiological model, we identified cerebral visual Emerging cortical function and infant cortical impairment in infants in the first year of life. In the impairment second, using photo/videorefraction in population refractive screening programs, we showed that infant The work discussed at the beginning of this review spectacle wear could reduce the incidence of strabismus arose out of the first twenty years of my research with and amblyopia, but many preschool children, who had Oliver Braddick and our team in the Visual Develop- been significantly hyperopic earlier, showed visuo-motor ment Unit in Cambridge, particularly John Wattam- and attentional deficits. This led us to compare Bell and Shirley Anker (Atkinson, 2000). We began by developing dorsal and ventral streams, using sensitivity devising new methods, both behavioral (automated to global motion and form as signatures, finding deficits forced-choice preferential looking) and electrophysio- in motion sensitivity relative to form in children with logical (steady-state VEP/VERP—Visual Evoked Po- Williams syndrome, or perinatal brain injury in tential/Visual Event Related Potential) to measure the hemiplegia or preterm birth. Later research showed that normal visual capacities of infants such as acuity and this DSV was common across many disorders, both ‘‘ ’’ contrast sensitivity, over the first years of life (Atkin- genetic and acquired, from autism to amblyopia. -

Draft Common Framework for Earth-Observation Data
THE U.S. GROUP ON EARTH OBSERVATIONS DRAFT COMMON FRAMEWORK FOR EARTH-OBSERVATION DATA Table of Contents Background ..................................................................................................................................... 2 Purpose of the Common Framework ........................................................................................... 2 Target User of the Common Framework ................................................................................. 4 Scope of the Common Framework........................................................................................... 5 Structure of the Common Framework ...................................................................................... 6 Data Search and Discovery Services .............................................................................................. 7 Introduction ................................................................................................................................. 7 Standards and Protocols............................................................................................................... 8 Methods and Practices ............................................................................................................... 10 Implementations ........................................................................................................................ 11 Software ................................................................................................................................