1. Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Map Projections--A Working Manual
This is a reproduction of a library book that was digitized by Google as part of an ongoing effort to preserve the information in books and make it universally accessible. https://books.google.com 7 I- , t 7 < ?1 > I Map Projections — A Working Manual By JOHN P. SNYDER U.S. GEOLOGICAL SURVEY PROFESSIONAL PAPER 1395 _ i UNITED STATES GOVERNMENT PRINTING OFFIGE, WASHINGTON: 1987 no U.S. DEPARTMENT OF THE INTERIOR BRUCE BABBITT, Secretary U.S. GEOLOGICAL SURVEY Gordon P. Eaton, Director First printing 1987 Second printing 1989 Third printing 1994 Library of Congress Cataloging in Publication Data Snyder, John Parr, 1926— Map projections — a working manual. (U.S. Geological Survey professional paper ; 1395) Bibliography: p. Supt. of Docs. No.: I 19.16:1395 1. Map-projection — Handbooks, manuals, etc. I. Title. II. Series: Geological Survey professional paper : 1395. GA110.S577 1987 526.8 87-600250 For sale by the Superintendent of Documents, U.S. Government Printing Office Washington, DC 20402 PREFACE This publication is a major revision of USGS Bulletin 1532, which is titled Map Projections Used by the U.S. Geological Survey. Although several portions are essentially unchanged except for corrections and clarification, there is consider able revision in the early general discussion, and the scope of the book, originally limited to map projections used by the U.S. Geological Survey, now extends to include several other popular or useful projections. These and dozens of other projections are described with less detail in the forthcoming USGS publication An Album of Map Projections. As before, this study of map projections is intended to be useful to both the reader interested in the philosophy or history of the projections and the reader desiring the mathematics. -
![Arxiv:1811.01571V2 [Cs.CV] 24 Jan 2019 Many Traditional Cnns on 3D Data Simply Extend the 2D Convolutional Op- Erations to 3D, for Example, the Work of Wu Et Al](https://docslib.b-cdn.net/cover/4678/arxiv-1811-01571v2-cs-cv-24-jan-2019-many-traditional-cnns-on-3d-data-simply-extend-the-2d-convolutional-op-erations-to-3d-for-example-the-work-of-wu-et-al-314678.webp)
Arxiv:1811.01571V2 [Cs.CV] 24 Jan 2019 Many Traditional Cnns on 3D Data Simply Extend the 2D Convolutional Op- Erations to 3D, for Example, the Work of Wu Et Al
SPNet: Deep 3D Object Classification and Retrieval using Stereographic Projection Mohsen Yavartanoo1[0000−0002−0109−1202], Eu Young Kim1[0000−0003−0528−6557], and Kyoung Mu Lee1[0000−0001−7210−1036] Department of ECE, ASRI, Seoul National University, Seoul, Korea https://cv.snu.ac.kr/ fmyavartanoo, shreka116, [email protected] Abstract. We propose an efficient Stereographic Projection Neural Net- work (SPNet) for learning representations of 3D objects. We first trans- form a 3D input volume into a 2D planar image using stereographic projection. We then present a shallow 2D convolutional neural network (CNN) to estimate the object category followed by view ensemble, which combines the responses from multiple views of the object to further en- hance the predictions. Specifically, the proposed approach consists of four stages: (1) Stereographic projection of a 3D object, (2) view-specific fea- ture learning, (3) view selection and (4) view ensemble. The proposed ap- proach performs comparably to the state-of-the-art methods while having substantially lower GPU memory as well as network parameters. Despite its lightness, the experiments on 3D object classification and shape re- trievals demonstrate the high performance of the proposed method. Keywords: 3D object classification · 3D object retrieval · Stereographic Projection · Convolutional Neural Network · View Ensemble · View Se- lection. 1 Introduction In recent years, success of deep learning methods, in particular, convolutional neural network (CNN), has urged rapid development in various computer vision applications such as image classification, object detection, and super-resolution. Along with the drastic advances in 2D computer vision, understanding 3D shapes and environment have also attracted great attention. -
Unusual Map Projections Tobler 1999
Unusual Map Projections Waldo Tobler Professor Emeritus Geography department University of California Santa Barbara, CA 93106-4060 http://www.geog.ucsb.edu/~tobler 1 Based on an invited presentation at the 1999 meeting of the Association of American Geographers in Hawaii. Copyright Waldo Tobler 2000 2 Subjects To Be Covered Partial List The earth’s surface Area cartograms Mercator’s projection Combined projections The earth on a globe Azimuthal enlargements Satellite tracking Special projections Mapping distances And some new ones 3 The Mapping Process Common Surfaces Used in cartography 4 The surface of the earth is two dimensional, which is why only (but also both) latitude and longitude are needed to pin down a location. Many authors refer to it as three dimensional. This is incorrect. All map projections preserve the two dimensionality of the surface. The Byte magazine cover from May 1979 shows how the graticule rides up and down over hill and dale. Yes, it is embedded in three dimensions, but the surface is a curved, closed, and bumpy, two dimensional surface. Map projections convert this to a flat two dimensional surface. 5 The Surface of the Earth Is Two-Dimensional 6 The easy way to demonstrate that Mercator’s projection cannot be obtained as a perspective transformation is to draw lines from the latitudes on the projection to their occurrence on a sphere, here represented by an adjoining circle. The rays will not intersect in a point. 7 Mercator’s Projection Is Not Perspective 8 It is sometimes asserted that one disadvantage of a globe is that one cannot see all of the entire earth at one time. -
Map Projections Paper 4 (Th.) UNIT : I ; TOPIC : 3 …Introduction
FOR SEMESTER 3 GE Students , Geography Map Projections Paper 4 (Th.) UNIT : I ; TOPIC : 3 …Introduction Prepared and Compiled By Dr. Rajashree Dasgupta Assistant Professor Dept. of Geography Government Girls’ General Degree College 3/23/2020 1 Map Projections … The method by which we transform the earth’s spheroid (real world) to a flat surface (abstraction), either on paper or digitally Define the spatial relationship between locations on earth and their relative locations on a flat map Think about projecting a see- through globe onto a wall Dept. of Geography, GGGDC, 3/23/2020 Kolkata 2 Spatial Reference = Datum + Projection + Coordinate system Two basic locational systems: geometric or Cartesian (x, y, z) and geographic or gravitational (f, l, z) Mean sea level surface or geoid is approximated by an ellipsoid to define an earth datum which gives (f, l) and distance above geoid gives (z) 3/23/2020 Dept. of Geography, GGGDC, Kolkata 3 3/23/2020 Dept. of Geography, GGGDC, Kolkata 4 Classifications of Map Projections Criteria Parameter Classes/ Subclasses Extrinsic Datum Direct / Double/ Spherical Triple Surface Spheroidal Plane or Ist Order 2nd Order 3rd Order surface of I. Planar a. Tangent i. Normal projection II. Conical b. Secant ii. Transverse III. Cylindric c. Polysuperficial iii. Oblique al Method of Perspective Semi-perspective Non- Convention Projection perspective al Intrinsic Properties Azimuthal Equidistant Othomorphic Homologra phic Appearance Both parallels and meridians straight of parallels Parallels straight, meridians curve and Parallels curves, meridians straight meridians Both parallels and meridians curves Parallels concentric circles , meridians radiating st. lines Parallels concentric circles, meridians curves Geometric Rectangular Circular Elliptical Parabolic Shape 3/23/2020 Dept. -

Uon Digital Repository Home
University of Nairobi School of Engineering Building a QGIS Helper Application to Overcome the Challenges of Cassini to UTM Coordinate System Conversions in Kenya BY Ajanga Dissent Ingati F56/81982/2015 A Project submitted in partial fulfillment for the Degree of Master of Science in Geographical Information Systems, in the Department of Geospatial & Space Technology of the University of Nairobi October 2017 I Declaration I, Ajanga Dissent Ingati, hereby declare that this project is my original work. To the best of my knowledge, the work presented here has not been presented for a degree in any other Institution of Higher Learning. ……………………………………. ……………………… .……..……… Name of student Signature Date This project has been submitted for examination with my approval as university supervisor. ……………………………………. ……………………… .……..……… Name of Supervisor Signature Date I Dedication I dedicate this work to my family for their support throughout the entire process of pursuing this degree and to the completion of the project. Your encouragement has been instrumental in ensuring the success of this project; may God truly bless you. II Acknowledgement I would like to show my heartfelt appreciation to all the people who saw me through the process of preparing this report. These thanks go to all those who provided technical support, talked through the issues I studied, read, wrote, gave comments, and also those who assisted in editing and proof reading of this project report before submission. I would like to thank Steve Firsake for his technical support through Python Programing. Special thanks also go to Dr.-Ing. Musyoka for his technical advice and support for the entire project. -

A Bevy of Area Preserving Transforms for Map Projection Designers.Pdf
Cartography and Geographic Information Science ISSN: 1523-0406 (Print) 1545-0465 (Online) Journal homepage: http://www.tandfonline.com/loi/tcag20 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe To cite this article: Daniel “daan” Strebe (2018): A bevy of area-preserving transforms for map projection designers, Cartography and Geographic Information Science, DOI: 10.1080/15230406.2018.1452632 To link to this article: https://doi.org/10.1080/15230406.2018.1452632 Published online: 05 Apr 2018. Submit your article to this journal View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tcag20 CARTOGRAPHY AND GEOGRAPHIC INFORMATION SCIENCE, 2018 https://doi.org/10.1080/15230406.2018.1452632 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe Mapthematics LLC, Seattle, WA, USA ABSTRACT ARTICLE HISTORY Sometimes map projection designers need to create equal-area projections to best fill the Received 1 January 2018 projections’ purposes. However, unlike for conformal projections, few transformations have Accepted 12 March 2018 been described that can be applied to equal-area projections to develop new equal-area projec- KEYWORDS tions. Here, I survey area-preserving transformations, giving examples of their applications and Map projection; equal-area proposing an efficient way of deploying an equal-area system for raster-based Web mapping. projection; area-preserving Together, these transformations provide a toolbox for the map projection designer working in transformation; the area-preserving domain. area-preserving homotopy; Strebe 1995 projection 1. Introduction two categories: plane-to-plane transformations and “sphere-to-sphere” transformations – but in quotes It is easy to construct a new conformal projection: Find because the manifold need not be a sphere at all. -
Bibliography of Map Projections
AVAILABILITY OF BOOKS AND MAPS OF THE U.S. GEOlOGICAL SURVEY Instructions on ordering publications of the U.S. Geological Survey, along with prices of the last offerings, are given in the cur rent-year issues of the monthly catalog "New Publications of the U.S. Geological Survey." Prices of available U.S. Geological Sur vey publications released prior to the current year are listed in the most recent annual "Price and Availability List" Publications that are listed in various U.S. Geological Survey catalogs (see back inside cover) but not listed in the most recent annual "Price and Availability List" are no longer available. Prices of reports released to the open files are given in the listing "U.S. Geological Survey Open-File Reports," updated month ly, which is for sale in microfiche from the U.S. Geological Survey, Books and Open-File Reports Section, Federal Center, Box 25425, Denver, CO 80225. Reports released through the NTIS may be obtained by writing to the National Technical Information Service, U.S. Department of Commerce, Springfield, VA 22161; please include NTIS report number with inquiry. Order U.S. Geological Survey publications by mail or over the counter from the offices given below. BY MAIL OVER THE COUNTER Books Books Professional Papers, Bulletins, Water-Supply Papers, Techniques of Water-Resources Investigations, Circulars, publications of general in Books of the U.S. Geological Survey are available over the terest (such as leaflets, pamphlets, booklets), single copies of Earthquakes counter at the following Geological Survey Public Inquiries Offices, all & Volcanoes, Preliminary Determination of Epicenters, and some mis of which are authorized agents of the Superintendent of Documents: cellaneous reports, including some of the foregoing series that have gone out of print at the Superintendent of Documents, are obtainable by mail from • WASHINGTON, D.C.--Main Interior Bldg., 2600 corridor, 18th and C Sts., NW. -

Portraying Earth
A map says to you, 'Read me carefully, follow me closely, doubt me not.' It says, 'I am the Earth in the palm of your hand. Without me, you are alone and lost.’ Beryl Markham (West With the Night, 1946 ) • Map Projections • Families of Projections • Computer Cartography Students often have trouble with geographic names and terms. If you need/want to know how to pronounce something, try this link. Audio Pronunciation Guide The site doesn’t list everything but it does have the words with which you’re most likely to have trouble. • Methods for representing part of the surface of the earth on a flat surface • Systematic representations of all or part of the three-dimensional Earth’s surface in a two- dimensional model • Transform spherical surfaces into flat maps. • Affect how maps are used. The problem: Imagine a large transparent globe with drawings. You carefully cover the globe with a sheet of paper. You turn on a light bulb at the center of the globe and trace all of the things drawn on the globe onto the paper. You carefully remove the paper and flatten it on the table. How likely is it that the flattened image will be an exact copy of the globe? The different map projections are the different methods geographers have used attempting to transform an image of the spherical surface of the Earth into flat maps with as little distortion as possible. No matter which map projection method you use, it is impossible to show the curved earth on a flat surface without some distortion. -
Estimation of an Unknown Cartographic Projection and Its Parameters from the Map
Estimation of an Unknown Cartographic Projection and its Parameters from the Map Faculty of Sciences, Charles University in Prague , Tel.: ++420-221-951-400 Abstract This article presents a new off-line method for the detection, analysis and estimation of an unknown carto- graphic projection and its parameters from a map. Several invariants are used to construct the objective function φ that describes the relationship between the 0D, 1D, and 2D entities on the analyzed and reference maps. It is min- imized using the Nelder-Mead downhill simplex algorithm. A simplified and computationally cheaper version of the objective function φ involving only 0D elements is also presented. The following parameters are estimated: a map projection type, a map projection aspect given by the meta pole K coordinates [ϕk,λk], a true parallel latitude ϕ0, central meridian longitude λ0, a map scale, and a map rotation. Before the analysis, incorrectly drawn elements on the map can be detected and removed using the IRLS. Also introduced is a new method for computing the L2 distance between the turning functions Θ1, Θ2 of the corresponding faces using dynamic programming. Our ap- proach may be used to improve early map georeferencing; it can also be utilized in studies of national cartographic heritage or land use applications. The results are presented both for real cartographic data, representing early maps from the David Rumsay Map Collection, and for the synthetic tests. Keywords: digital cartography, map projection, analysis, simplex method, optimization, Voronoi diagram, outliers detection, early maps, georeferencing, cartographic heritage, meta data, Marc 21, MapAnalyst. 1 Introduction the proposed solution, this step can be performed semi- automatically and with a higher degree of relevance us- ing our method. -
Representations of Celestial Coordinates in FITS
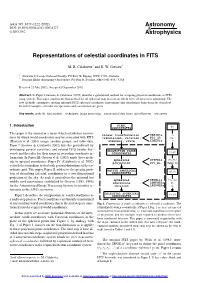
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

Mapping the Drowned World by Tracey Clement
Mapping The Drowned World by Tracey Clement A thesis submitted in fulfilment of the requirements for the degree of Doctor of Philosophy Sydney College of The Arts The University of Sydney 2017 Statement This volume is presented as a record of the work undertaken for the degree of Doctor of Philosophy at Sydney College of the Arts, University of Sydney. Table of Contents Acknowledgments iii List of images iv Abstract x Introduction: In the beginning, The End 1 Chapter One: The ABCs of The Drowned World 6 Chapter Two: Mapping The Drowned World 64 Chapter Three: It's all about Eve 97 Chapter Four: Soon it would be too hot 119 Chapter Five: The ruined city 154 Conclusion: At the end, new beginnings 205 Bibliography 210 Appendix A: Timeline for The Drowned World 226 Appendix B: Mapping The Drowned World artist interviews 227 Appendix C: Experiment and process documentation 263 Work presented for examination 310 ii Acknowledgments I wish to acknowledge the support of my partner Peter Burgess. He provided installation expertise, help in wrangling images down to size, hard-copies of multiple drafts, many hot dinners, and much, much more. Thanks also to my supervisor Professor Bradford Buckley for his steady guidance. In addition, the technical staff at SCA deserve a mention. Thanks also to all my friends, particularly those who let themselves be coerced into assisting with installation: you know who you are. And last, but certainly not least, thank you so much to the librarians at all of the University of Sydney libraries, and especially at SCA. -

Cylindrical Projections 27
MAP PROJECTION PROPERTIES: CONSIDERATIONS FOR SMALL-SCALE GIS APPLICATIONS by Eric M. Delmelle A project submitted to the Faculty of the Graduate School of State University of New York at Buffalo in partial fulfillments of the requirements for the degree of Master of Arts Geographical Information Systems and Computer Cartography Department of Geography May 2001 Master Advisory Committee: David M. Mark Douglas M. Flewelling Abstract Since Ptolemeus established that the Earth was round, the number of map projections has increased considerably. Cartographers have at present an impressive number of projections, but often lack a suitable classification and selection scheme for them, which significantly slows down the mapping process. Although a projection portrays a part of the Earth on a flat surface, projections generate distortion from the original shape. On world maps, continental areas may severely be distorted, increasingly away from the center of the projection. Over the years, map projections have been devised to preserve selected geometric properties (e.g. conformality, equivalence, and equidistance) and special properties (e.g. shape of the parallels and meridians, the representation of the Pole as a line or a point and the ratio of the axes). Unfortunately, Tissot proved that the perfect projection does not exist since it is not possible to combine all geometric properties together in a single projection. In the twentieth century however, cartographers have not given up their creativity, which has resulted in the appearance of new projections better matching specific needs. This paper will review how some of the most popular world projections may be suited for particular purposes and not for others, in order to enhance the message the map aims to communicate.