Coordinate Systems and Units in Hisparc
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Report of the Commissioner of the General Land Office, 1860
University of Oklahoma College of Law University of Oklahoma College of Law Digital Commons American Indian and Alaskan Native Documents in the Congressional Serial Set: 1817-1899 11-29-1860 Report of the Commissioner of the General Land Office, 1860 Follow this and additional works at: https://digitalcommons.law.ou.edu/indianserialset Part of the Indian and Aboriginal Law Commons Recommended Citation S. Exec. Doc. No. 2, 36th Cong., 2nd Sess.(1860) This Senate Executive Document is brought to you for free and open access by University of Oklahoma College of Law Digital Commons. It has been accepted for inclusion in American Indian and Alaskan Native Documents in the Congressional Serial Set: 1817-1899 by an authorized administrator of University of Oklahoma College of Law Digital Commons. For more information, please contact [email protected]. SECRETARY OF THE INTERIOR. 49 REPORT OF THE CO~I~IJISSIONER OF TI-IE GENER.AL LAND OFFICE. ' GENERAL LAND OFFICE, November 29, 1860. Sn-t: During the past year the operations of the land system have extended by direct administrq.tive action within the limits of all the political divisions embracing the public domain, to wit: Ohio, Indiana, Michigan, Illinois, Wisconsin, Iowa, California, Oregon, Minnesota, Florida, Alabama, Mississippi, Louisiana, Arkansas, Missouri, and to the Territories of Kansas, Nebraska, Minnesota, (known as Dacotah,) Washington, New Mexico, and Utah. Our correspondence has passed those limits, having extended within all the other members of the Confederacy where non-resident claimants hold interests, requiring adjustment under bounty land grants for services in the war of the revolution, in the last war with Great Britain, the war with Mexico, with Indian tribes, under foreign titles, and under other grants in great diversity. -

General Assembly
UNITED NATIONS Distr. GENERAL GENERAL A/AC.135/11/Add.l ASSEMBLY 13 August 1968 ORIGINAL: ENGLISH AD HCC COMMITTEE TO STUDY THE PEACEFUL USES OF THE SEA-BED AND THE CCEAN FLOOR BEYOND THE LIMITS OF NATIONAL JURISDICTION Third session SURVEY OF NATIONAL LEGISLATION CONCERNING THE SEA-BED AND THE OCEAN FLOOR, AND THE SUBSOIL THEREOF, UNDERLYING THE HIGH SEAS BEYOND THE LIMITS OF PRESENT NATIONAL JURISDICTION Document prepared by the Secretariat I ... 68-17267 A/AC.135/11/Add.l English Page 2 CONTE1"TS Ifote . 3 I. Limits of the territorial sea. 5 II. Limits and scope of national jurisdiction over the continental shelf 9 1. Brazil. 10 2. Dahomey 11 3. Dcminican Republic 12 4. Guaterr:.ala 12 5. India 13 6. Iran 14 7, Ivory Coast . 15 8. IJicaragua . 15 9. Senegal 15 10. Spain . 16 11. United Kingdom of Great Britain and Northern Ireland 20 12. Venezuela 23 III. Protection of submarine cables and pipelinesY IV. Prevention of pollution of the seaY V. Prohibition of broadcasting from ships, aircraft and marine structures y VI. List of national laws, orders and regulations comprising exploration and exploitation procedures and safety practices 25 y No additional information has been received by the United Nations Secretariat. I ... A/AC.135/11/Add.l English Page 3 NOTE The present document contains legislative texts recently provided or indicated by Governments in response to circular notes sent to them by the Secretary-General on 16 March 1967, 26 January 1968 and 9 April 1968. / ... A/AC.135/11/Add.l English Page 5 I. -
Datum Transformations of GPS Positions Application Note
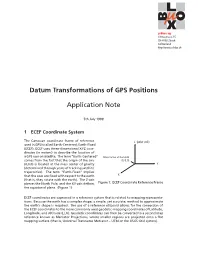
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

A Unified Plane Coordinate Reference System
This dissertation has been microfilmed exactly as received COLVOCORESSES, Alden Partridge, 1918- A UNIFIED PLANE COORDINATE REFERENCE SYSTEM. The Ohio State University, Ph.D., 1965 Geography University Microfilms, Inc., Ann Arbor, Michigan A UNIFIED PLANE COORDINATE REFERENCE SYSTEM DISSERTATION Presented in Partial Fulfillment of the Requirements for The Degree Doctor of Philosophy in the Graduate School of The Ohio State University Alden P. Colvocoresses, B.S., M.Sc. Lieutenant Colonel, Corps of Engineers United States Army * * * * * The Ohio State University 1965 Approved by Adviser Department of Geodetic Science PREFACE This dissertation was prepared while the author was pursuing graduate studies at The Ohio State University. Although attending school under order of the United States Army, the views and opinions expressed herein represent solely those of the writer. A list of individuals and agencies contributing to this paper is presented as Appendix B. The author is particularly indebted to two organizations, The Ohio State University and the Army Map Service. Without the combined facilities of these two organizations the preparation of this paper could not have been accomplished. Dr. Ivan Mueller of the Geodetic Science Department of The Ohio State University served as adviser and provided essential guidance and counsel. ii VITA September 23, 1918 Born - Humboldt, Arizona 1941 oo.oo.o BoS. in Mining Engineering, University of Arizona 1941-1945 .... Military Service, European Theatre 1946-1950 o . o Mining Engineer, Magma Copper -

World Geodetic System 1984
World Geodetic System 1984 Responsible Organization: National Geospatial-Intelligence Agency Abbreviated Frame Name: WGS 84 Associated TRS: WGS 84 Coverage of Frame: Global Type of Frame: 3-Dimensional Last Version: WGS 84 (G1674) Reference Epoch: 2005.0 Brief Description: WGS 84 is an Earth-centered, Earth-fixed terrestrial reference system and geodetic datum. WGS 84 is based on a consistent set of constants and model parameters that describe the Earth's size, shape, and gravity and geomagnetic fields. WGS 84 is the standard U.S. Department of Defense definition of a global reference system for geospatial information and is the reference system for the Global Positioning System (GPS). It is compatible with the International Terrestrial Reference System (ITRS). Definition of Frame • Origin: Earth’s center of mass being defined for the whole Earth including oceans and atmosphere • Axes: o Z-Axis = The direction of the IERS Reference Pole (IRP). This direction corresponds to the direction of the BIH Conventional Terrestrial Pole (CTP) (epoch 1984.0) with an uncertainty of 0.005″ o X-Axis = Intersection of the IERS Reference Meridian (IRM) and the plane passing through the origin and normal to the Z-axis. The IRM is coincident with the BIH Zero Meridian (epoch 1984.0) with an uncertainty of 0.005″ o Y-Axis = Completes a right-handed, Earth-Centered Earth-Fixed (ECEF) orthogonal coordinate system • Scale: Its scale is that of the local Earth frame, in the meaning of a relativistic theory of gravitation. Aligns with ITRS • Orientation: Given by the Bureau International de l’Heure (BIH) orientation of 1984.0 • Time Evolution: Its time evolution in orientation will create no residual global rotation with regards to the crust Coordinate System: Cartesian Coordinates (X, Y, Z). -
Mission Conventions Document
Earth Observation Mission CFI Software CONVENTIONS DOCUMENT Code: EO-MA-DMS-GS-0001 Issue: 4.19 Date: 29/05/2020 Name Function Signature Prepared by: Fabrizio Pirondini Project Engineer José Antonio González Abeytua Project Manager Juan José Borrego Bote Project Engineer Carlos Villanueva Project Manager Checked by: Javier Babe Quality A. Manager Approved by: Carlos Villanueva Project Manager DEIMOS Space S.L.U. Ronda de Poniente, 19 Edificio Fiteni VI, Portal 2, 2ª Planta 28760 Tres Cantos (Madrid), SPAIN Tel.: +34 91 806 34 50 Fax: +34 91 806 34 51 E-mail: [email protected] © DEIMOS Space S.L.U. All Rights Reserved. No part of this document may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior written permission of DEIMOS Space S.L.U. or ESA. Code: EO-MA-DMS-GS-0001 Date: 29/05/2020 Issue: 4.19 Page: 2 DOCUMENT INFORMATION Contract Data Classification Internal Contract Number: 4000102614/1O/NL/FF/ef Public Industry X Contract Issuer: ESA / ESTEC Confidential External Distribution Name Organization Copies Electronic handling Word Processor: LibreOffice 5.2.3.3 Archive Code: P/MCD/DMS/01/026-003 Electronic file name: eo-ma-dms-gs-001-12 Earth Observation Mission CFI Software. CONVENTIONS DOCUMENT Code: EO-MA-DMS-GS-0001 Date: 29/05/2020 Issue: 4.19 Page: 3 DOCUMENT STATUS LOG Issue Change Description Date Approval 1.0 New Document 27/10/09 • Issue in-line wit EOCFI libraries version 4.1 • Section 8.2.4 Refractive -

Coordinates James R
Coordinates James R. Clynch Naval Postgraduate School, 2002 I. Coordinate Types There are two generic types of coordinates: Cartesian, and Curvilinear of Angular. Those that provide x-y-z type values in meters, kilometers or other distance units are called Cartesian. Those that provide latitude, longitude, and height are called curvilinear or angular. The Cartesian and angular coordinates are equivalent, but only after supplying some extra information. For the spherical earth model only the earth radius is needed. For the ellipsoidal earth, two parameters of the ellipsoid are needed. (These can be any of several sets. The most common is the semi-major axis, called "a", and the flattening, called "f".) II. Cartesian Coordinates A. Generic Cartesian Coordinates These are the coordinates that are used in algebra to plot functions. For a two dimensional system there are two axes, which are perpendicular to each other. The value of a point is represented by the values of the point projected onto the axes. In the figure below the point (5,2) and the standard orientation for the X and Y axes are shown. In three dimensions the same process is used. In this case there are three axis. There is some ambiguity to the orientation of the Z axis once the X and Y axes have been drawn. There 1 are two choices, leading to right and left handed systems. The standard choice, a right hand system is shown below. Rotating a standard (right hand) screw from X into Y advances along the positive Z axis. The point Q at ( -5, -5, 10) is shown. -

IERS Annual Report 2000
International Earth Rotation Service (IERS) Service International de la Rotation Terrestre Member of the Federation of the Astronomical and Geophysical data analysis Service (FAGS) IERS Annual Report 2000 Verlag des Bundesamts für Kartographie und Geodäsie Frankfurt am Main 2001 IERS Annual Report 2000 Edited by Wolfgang R. Dick and Bernd Richter Technical support: Alexander Lothhammer International Earth Rotation Service Central Bureau Bundesamt für Kartographie und Geodäsie Richard-Strauss-Allee 11 60598 Frankfurt am Main Germany phone: ++49-69-6333-273/261/250 fax: ++49-69-6333-425 e-mail: [email protected] URL: www.iers.org ISSN: 1029-0060 (print version) ISBN: 3-89888-862-2 (print version) An online version of this document is available at: http://www.iers.org/iers/publications/reports/2000/ © Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main, 2001 Table of Contents I Forewords............................................................................................. 4 II Organisation of the IERS in 2000............................................................. 7 III Reports of Coordination Centres III.1 VLBI Coordination Centre.............................................................. 10 III.2 GPS Coordination Centre.............................................................. 13 III.3 SLR and LLR Coordination Centre................................................. 16 III.4 DORIS Coordination Centre........................................................... 19 IV Reports of Bureaus, Centres and -

ECEF) Coordinate System
2458-6 Workshop on GNSS Data Application to Low Latitude Ionospheric Research 6 - 17 May 2013 Fundamentals of Satellite Navigation HEGARTY Christopher The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford MA 01730-1420 U.S.A. Fundamentals of Satellite Navigation Chris Hegarty May 2013 1 © 2013 The MITRE Corporation. All rights reserved. Chris Hegarty The MITRE Corporation [email protected] 781-271-2127 (Tel) The contents of this material reflect the views of the author. Neither the Federal Aviation Administration nor the Department of the Transportation makes any warranty or guarantee, or promise, expressed or implied, concerning the content or accuracy of the views expressed herein. 2 Fundamentals of Satellite Navigation ■ Geodesy ■ Time and clocks ■ Satellite orbits ■ Positioning 3 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Inertial (ECI) Coordinate System • Oblateness of the Earth causes direction of axes to move over time • So that coordinate system is truly “inertial” (fixed with respect to stars), it is necessary to fix coordinates • J2000 system fixes coordinates at 11:58:55.816 hours UTC on January 1, 2000 4 © 2013 The MITRE Corporation. All rights reserved. Precession and Nutation Vega Polaris 1.Rotation axis 2. In ~13,000 (now pointing yrs, rotation near Polaris) axis will point near Vega 3. In ~26,000 yrs, back to Earth Polaris •Precession is the large (23.5 deg half-angle) periodic motion •Nutation is a superimposed oscillation (~9 arcsec max) 5 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Earth Fixed (ECEF) Coordinate System Notes: (1) By convention, the z-axis is the mean location of the north pole (spin axis of Earth) for 1900 – 1905, (2) the x-axis passes through 0º longitude, (3) the Earth’s crust moves slowly with respect to this coordinate system! 6 © 2013 The MITRE Corporation. -

Latitude and Longitude
Latitude and Longitude Finding your location throughout the world! What is Latitude? • Latitude is defined as a measurement of distance in degrees north and south of the equator • The word latitude is derived from the Latin word, “latus”, meaning “wide.” What is Latitude • There are 90 degrees of latitude from the equator to each of the poles, north and south. • Latitude lines are parallel, that is they are the same distance apart • These lines are sometimes refered to as parallels. The Equator • The equator is the longest of all lines of latitude • It divides the earth in half and is measured as 0° (Zero degrees). North and South Latitudes • Positions on latitude lines above the equator are called “north” and are in the northern hemisphere. • Positions on latitude lines below the equator are called “south” and are in the southern hemisphere. Let’s take a quiz Pull out your white boards Lines of latitude are ______________Parallel to the equator There are __________90 degrees of latitude north and south of the equator. The equator is ___________0 degrees. Another name for latitude lines is ______________.Parallels The equator divides the earth into ___________2 equal parts. Great Job!!! Lets Continue! What is Longitude? • Longitude is defined as measurement of distance in degrees east or west of the prime meridian. • The word longitude is derived from the Latin word, “longus”, meaning “length.” What is Longitude? • The Prime Meridian, as do all other lines of longitude, pass through the north and south pole. • They make the earth look like a peeled orange. The Prime Meridian • The Prime meridian divides the earth in half too. -

Social Studies Class 5 Lesson 3 Latitudes and Longitudes
Social Studies Class 5 Lesson 3 Latitudes And Longitudes Learning Objectives; Parallels or Latitudes Important Latitudes Meridians or Longitudes Locating Places Since the Earth is spherical in shape, it is difficult to locate a place on Earth. So our mapmakers devised a system of imaginary lines to form a net or grid on maps and globes Thus there are a number of horizontal and vertical lines drawn on maps and globes to help us locate a place. Any location on Earth is described by two numbers--- its Latitude and its Longitude. The imaginary lines that run from East to West are called Parallels or Lines of Latitude. The imaginary lines that run North to South from the poles are called Meridians or the lines of Longitude. LATITUDES Lines of Latitude are east-west circles around the globe. Equator is the 0˚ latitude. It runs through the centre of the globe, halfway between the north pole and the south pole which are at 90˚. Equator 0 North pole 90˚N South pole 90˚S The Equator divides the Earth into two equal halves called hemispheres. 1. Northern Hemisphere: The upper half of the Earth to the north of the equator is called Northern Hemisphere. 2. Southern Hemisphere:The lower half of the earth to the south of the equator is called Southern Hemisphere. Features of Latitude These lines run parallel to each other. They are located at an equal distance from each other. They are also called Parallels. All Parallels form a complete circle around the globe. North Pole and South Pole are however shown as points. -

Improved Kalman Filter Variants for UAV Tracking with Radar Motion Models
electronics Article Improved Kalman Filter Variants for UAV Tracking with Radar Motion Models Yuan Wei 1 , Tao Hong 2,3 and Michel Kadoch 4,* 1 School of Electronic and Information Engineering, Beihang University, Beijing 100191, China; [email protected] 2 Yunnan Innovation Institute BUAA, Kunming 650233, China; [email protected] · 3 Beijing Key Laboratory for Microwave Sensing and Security Applications, Beihang University, Beijing 100191, China 4 Department of Electrical Engineering, ETS, University of Quebec, Montreal, QC H1A 0A1, Canada * Correspondence: [email protected] Received: 8 April 2020; Accepted: 30 April 2020; Published: 7 May 2020 Abstract: Unmanned aerial vehicles (UAV) have made a huge influence on our everyday life with maturity of technology and more extensive applications. Tracking UAVs has become more and more significant because of not only their beneficial location-based service, but also their potential threats. UAVs are low-altitude, slow-speed, and small targets, which makes it possible to track them with mobile radars, such as vehicle radars and UAVs with radars. Kalman filter and its variant algorithms are widely used to extract useful trajectory information from data mixed with noise. Applying those filter algorithms in east-north-up (ENU) coordinates with mobile radars causes filter performance degradation. To improve this, we made a derivation on the motion-model consistency of mobile radar with constant velocity. Then, extending common filter algorithms into earth-centered earth-fixed (ECEF) coordinates to filter out random errors is proposed. The theory analysis and simulation shows that the improved algorithms provide more efficiency and compatibility in mobile radar scenes.