Robots, Androids and Animatrons.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Robotics Section Guide for Web.Indd
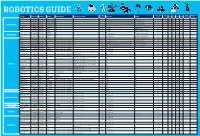
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Autonomous Vehicles in Support of Naval Operations Committee on Autonomous Vehicles in Support of Naval Operations, National Research Council
Autonomous Vehicles in Support of Naval Operations Committee on Autonomous Vehicles in Support of Naval Operations, National Research Council ISBN: 0-309-55115-3, 256 pages, 6 x 9, (2005) This free PDF was downloaded from: http://www.nap.edu/catalog/11379.html Visit the National Academies Press online, the authoritative source for all books from the National Academy of Sciences, the National Academy of Engineering, the Institute of Medicine, and the National Research Council: • Download hundreds of free books in PDF • Read thousands of books online, free • Sign up to be notified when new books are published • Purchase printed books • Purchase PDFs • Explore with our innovative research tools Thank you for downloading this free PDF. If you have comments, questions or just want more information about the books published by the National Academies Press, you may contact our customer service department toll-free at 888-624-8373, visit us online, or send an email to [email protected]. This free book plus thousands more books are available at http://www.nap.edu. Copyright © National Academy of Sciences. Permission is granted for this material to be shared for noncommercial, educational purposes, provided that this notice appears on the reproduced materials, the Web address of the online, full authoritative version is retained, and copies are not altered. To disseminate otherwise or to republish requires written permission from the National Academies Press. Autonomous Vehicles in Support of Naval Operations http://www.nap.edu/catalog/11379.html AUTONOMOUS VEHICLES IN SUPPORT OF NAVAL OPERATIONS Committee on Autonomous Vehicles in Support of Naval Operations Naval Studies Board Division on Engineering and Physical Sciences THE NATIONAL ACADEMIES PRESS Washington, D.C. -

Venus Aerobot Multisonde Mission
w AIAA Balloon Technology Conference 1999 Venus Aerobot Multisonde Mission By: James A. Cutts ('), Viktor Kerzhanovich o_ j. (Bob) Balaram o), Bruce Campbell (2), Robert Gershman o), Ronald Greeley o), Jeffery L. Hall ('), Jonathan Cameron o), Kenneth Klaasen v) and David M. Hansen o) ABSTRACT requires an orbital relay system that significantly Robotic exploration of Venus presents many increases the overall mission cost. The Venus challenges because of the thick atmosphere and Aerobot Multisonde (VAMuS) Mission concept the high surface temperatures. The Venus (Fig 1 (b) provides many of the scientific Aerobot Multisonde mission concept addresses capabilities of the VGA, with existing these challenges by using a robotic balloon or technology and without requiring an orbital aerobot to deploy a number of short lifetime relay. It uses autonomous floating stations probes or sondes to acquire images of the (aerobots) to deploy multiple dropsondes capable surface. A Venus aerobot is not only a good of operating for less than an hour in the hot lower platform for precision deployment of sondes but atmosphere of Venus. The dropsondes, hereafter is very effective at recovering high rate data. This described simply as sondes, acquire high paper describes the Venus Aerobot Multisonde resolution observations of the Venus surface concept and discusses a proposal to NASA's including imaging from a sufficiently close range Discovery program using the concept for a that atmospheric obscuration is not a major Venus Exploration of Volcanoes and concern and communicate these data to the Atmosphere (VEVA). The status of the balloon floating stations from where they are relayed to deployment and inflation, balloon envelope, Earth. -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

Monash Robotics and Mechatronics Engineering
MONASH ROBOTICS AND MECHATRONICS ENGINEERING monash.edu/engineering/ robotics-mechatronics WHAT DO ROBOTICS WHAT IS AND MECHATRONICS ROBOTICS AND ENGINEERS DO? Key to robotics and mechatronics engineering is the ability to analyse and design complex MECHATRONICS machines and systems, which often involve automation. Robotics and mechatronics engineers work with instrumentation, sensors and computer systems. They use these to control movement, optimise processes, ENGINEERING? monitor systems and detect faults. Robotics and mechatronics engineers can be found working in transport, manufacturing, healthcare and construction, particularly in Robotics and mechatronics are places where automation can improve efficiency and productivity, and where multidisciplinary fields of engineering reliability and safety are essential to that combine mechanical engineering, engineering operations. computing, electronics and control theory. They design and develop robots to operate in collaboration with humans, and control At the forefront of rapidly transforming technologies, robotics and systems for vehicles, aircraft, machinery, mechatronics engineers work to design robots and improve the production lines and can now be found automation, performance, features and functionality of products working in biotechnology and biomedicine. and systems with a mix of mechanical and electronic components. Being multidisciplinary in nature, robotics and As a robotics or mechatronics engineer you could design aircraft mechatronics engineers are highly skilled at avionics for autonomous drones, build robots for industry or medicine, managing projects and teams which bridge develop systems based on smartphones, or help robots understand the traditional areas of mechanical and human behaviour. Robotics and mechatronics engineering is also electrical engineering. used in the development, design and operation of processes and production lines needed to make most consumer products. -

Titan and Enceladus $1 B Mission
JPL D-37401 B January 30, 2007 Titan and Enceladus $1B Mission Feasibility Study Report Prepared for NASA’s Planetary Science Division Prepared By: Kim Reh Contributing Authors: John Elliott Tom Spilker Ed Jorgensen John Spencer (Southwest Research Institute) Ralph Lorenz (The Johns Hopkins University, Applied Physics Laboratory) KSC GSFC ARC Approved By: _________________________________ Kim Reh Dr. Ralph Lorenz Jet Propulsion Laboratory The Johns Hopkins University, Applied Study Manager Physics Laboratory Titan Science Lead _________________________________ Dr. John Spencer Southwest Research Institute Enceladus Science Lead Pre-decisional — For Planning and Discussion Purposes Only Titan and Enceladus Feasibility Study Report Table of Contents JPL D-37401 B The following members of an Expert Advisory and Review Board contributed to ensuring the consistency and quality of the study results through a comprehensive review and advisory process and concur with the results herein. Name Title/Organization Concurrence Chief Engineer/JPL Planetary Flight Projects Gentry Lee Office Duncan MacPherson JPL Review Fellow Glen Fountain NH Project Manager/JHU-APL John Niehoff Sr. Research Engineer/SAIC Bob Pappalardo Planetary Scientist/JPL Torrence Johnson Chief Scientist/JPL i Pre-decisional — For Planning and Discussion Purposes Only Titan and Enceladus Feasibility Study Report Table of Contents JPL D-37401 B This page intentionally left blank ii Pre-decisional — For Planning and Discussion Purposes Only Titan and Enceladus Feasibility Study Report Table of Contents JPL D-37401 B Table of Contents 1. EXECUTIVE SUMMARY.................................................................................................. 1-1 1.1 Study Objectives and Guidelines............................................................................ 1-1 1.2 Relation to Cassini-Huygens, New Horizons and Juno.......................................... 1-1 1.3 Technical Approach............................................................................................... -

Interview with Mark Tilden (Photo Courtesy of Wowwee Ltd.) Wowwee Courtesy of (Photo
APPENDIX ■ ■ ■ Interview with Mark Tilden (Photo courtesy of WowWee Ltd.) WowWee courtesy of (Photo Figure A-1. Here’s Mark Tilden at the 2005 New York Toy Fair. I have used excerpts from this interview throughout the book where applicable, but I also wanted to print it in its entirety. Some things, like Mark’s wonderful commentary on Hong Kong cuisine and his off-the-cuff comments on everything and anything, just didn’t fit into the structure of The Robosapien Companion, but they will be of interest to anyone who is curious about or admires the man behind the robots. 291 292 APPENDIX ■ INTERVIEW WITH MARK TILDEN This interview was conducted on February 13, 2005, at Wolfgang’s Steakhouse in the Murray Hill neighborhood of midtown Manhattan, in New York City. I recorded it with an Olympus DM-10 voice recorder. The dining room at Wolfgang’s is known for its historic tiled ceilings designed by Raphael Guastavino. They are beautiful, but they are an acoustic night- mare! Fortunately, my trusty DM-10 was up to the task. I have edited this only very lightly, mainly breaks where we spoke to waiters and so on. Also note that during a portion of this interview, Mark is showing me a slideshow on a little portable LCD screen. Most of the pictures from the slideshow ended up in Chapter 3. But if during the interview he seems to be making a reference, chances are it is to something on the screen. Without further ado, here is the full text of the interview. -

The Design of "Living" Biomech Machines: How Low Can One Go?
The Design of "Living" Biomech Machines: How low can one go? VBUG 1.5 "WALKMAN" Single battery. 0.7Kg. metal/plastic construction. Unibody frame. 5 tactile, 2 visual sensors. Control Core: 8 transistor Nv. 4 tran. Nu, 22 tran. motor. Total: 32 transistors. Behaviors: - High speed walking convergence. - powerful enviro. adaptive abilities - strong, accurate phototaxis. - 3 gaits; stop, walk, dig. - backup/explore ability. Mark W. Tilden Physics Division, Los Alamos National Laboratory <[email protected]> 505/667-2902 July, 1997 "So... what you guys have done is find a way to get useful work out of non-linear dynamics?" - Dr. Bob Shelton, NASA. Abstract Following three years of study into experimental Nervous Net (Nv) control devices, various successes and several amusing failures have implied some general principles on the nature of capable control systems for autonomous machines and perhaps, we conjecture, even biological organisms. These systems are minimal, elegant, and, depending upon their implementation in a "creature" structure, astonishingly robust. Their only problem seems to be that as they are collections of non-linear asynchronous elements, only a very complex analysis can adequately extract and explain the emergent competency of their operation. On the other hand, this could imply a cheap, self-programing engineering technology for autonomous machines capable of performing unattended work for years at a time, on earth and in space. Discussion, background and examples are given. Introduction to Biomorphic Design A Biomorphic robot (from the Greek for "of a living form") is a self-contained mechanical device fashioned on the assumption that chaotic reaction, not predictive forward modeling, is appropriate and sufficient for sustained "survival" in unspecified and unstructured environments. -

Employing Animatronics in Teaching Engineering Design
AC 2011-190: EMPLOYING ANIMATRONICS IN TEACHING ENGINEER- ING DESIGN Arif Sirinterlikci, Robert Morris University ARIF SIRINTERLIKCI received B.S. and M.S. degrees in Mechanical Engineering from Istanbul Tech- nical University, Turkey, and a Ph.D. degree in Industrial and Systems Engineering from the Ohio State University. Currently, he is a Professor of Engineering as well as Co-Head of Research and Outreach Cen- ter at Robert Morris University in Moon Township, Pennsylvania. His teaching and research areas include rapid prototyping and reverse engineering, robotics and automation, bioengineering, and entertainment technology. He has been active in ASEE and SME, serving as an officer of the ASEE Manufacturing Division and SME Bioengineering Tech Group. c American Society for Engineering Education, 2011 Employing Animatronics in Teaching Engineering Design Introduction This paper presents a cross-disciplinary methodology in teaching engineering design, especially product design. The author has utilized this animatronics-based methodology at college and secondary school levels for about a decade. The objective was to engage students in practical and meaningful projects. The result is an active learning environment that is also creative. The methodology was also employed for student recruitment and retention reasons. The effort has spanned two universities and included a senior capstone project1, an honors course2, multiple summer work-shops and camps3,4,5,6,7 as well as an introduction to engineering course. The curriculum encompasses the basics of engineering and product design, and development as well as team work. Students follow the following content sequence and relevant activities through concept development, computer-aided design (CAD), materials and fabrication, rapid prototyping and manufacturing, mechanical design and mechanisms, controls and programming. -

Unmanned Systems Roadmap: 2007-2032
DEC 102007 MEMORANDUM FOR SECRETARIES OF THE MILITARY DEPARTMENTS CHAIRMAN OF THE JOINT CHIEFS OF STAFF CIllEF OF STAFF OF THE ARMY CIllEF OF NAVAL OPERAnONS CHIEF OF STAFF OF THE AIR FORCE COMMANDANT OF THE MARINE CORPS DIRECTOR, DEFENSE ADVANCED RESEARCH PROJECTS AGENCY SUBJECT: Unmanned Systems Roadmap This is the first edition ofthe integrated Office ofthe Secretary ofDefense Unmanned Systems Roadmap (2007-2032) which includes Unmanned Aircraft Systems, Unmanned Ground Systems, and Unmanned Maritime Systems. This roadmap provides Defense-wide vision for unmanned systems and related technologies. The Department will continue to promote a common vision for future unmanned systems by making this roadmap widely available to industry and our Allies, and updating it as transformational concepts emerge. Unmanned systems will continue to have a central role in meeting our country's diverse security needs, especially in the Global War on Terrorism. ~-- Under Secretary ofDefense Intelligence w1tt-:~/ mes E. Cartwright J G. Gri es General, USMC Assistant Secretary ofDefense Vice Chairman, Jo' t Chiefs ofStaff Networks and Information Integration Unmanned Systems Roadmap 2007-2032 Executive Summary Today’s military has seen an evolution in technology that is creating an entirely new capability to project power through the use of unmanned systems while reducing the risk to human life. The contributions of unmanned systems continue to increase. As of October 2006, coalition Unmanned Aircraft Systems (UASs), exclusive of hand-launched systems, had flown almost 400,000 flight hours in support of Operations Enduring Freedom and Iraqi Freedom, Unmanned Ground Vehicles (UGVs) had responded to over 11,000 Improvised Explosive Device (IED) situations, and Unmanned Maritime Systems (UMSs) had provided security to ports. -
Solar Powered B.E.A.M) Bots Make Your Own Solar Powered Robot to Follow the Sun!
SOLAR POWERED B.E.A.M) BOTS MAKE YOUR OWN SOLAR POWERED ROBOT TO FOLLOW THE SUN! ELECTRICAL, ELECTRONIC ENGINEERING AND ROBOTICS ENGINEERING FOR SECONDARY SCHOOL STUDENTS THIS PROJECT HAS RECEIVED FUNDING FROM THE EUROPEAN UNION HORIZON 2020 RESEARCH AND INNOVATION PROGRAMME UNDER GRANT AGREEMENT NO. 710577 PROJECT DETAILS PROJECT ACRONYM STEM4YOU(th) PROJECT TITLE Promotion of STEM education by key scientific challenges and their impact on our life and career perspectives GRANT AGREEMENT 710577 START DATE 1 May 2016 THEME SWAFS / H2020 DELIVERABLE DETAILS WORK PACKAGE NO. AND TITLE WP5 – CONTENT CREATION, TOOLS AND LEARNING METHODOLOGY DEVELOPMENT DELIVERABLE NO. and TITLE D5.1 MULTIDISCIPLINARY COURSE- ENGINEERING SUB-COURSE NATURE OF DELIVERABLE AS PER R=Report DOW DISSEMINATION LEVEL AS PER PU=Public DOW VERSION FINAL DATE JULY 2018 AUTHORS EUGENIDES FOUNDATION THIS PROJECT HAS RECEIVED FUNDING FROM THE EUROPEAN UNION HORIZON 2020 RESEARCH AND INNOVATION PROGRAMME UNDER GRANT AGREEMENT NO. 710577 / 2 INDEX INTRODUCTION ........................................................................................................................... 4 Activity 0-What is engineering? ............................................................................................. 5 Activity 1 - Identifying the problem (what is the engineering problem?) .......... 13 Activity 2 – Divide into sub-problems ............................................................................... 15 Activity 3 – Explore the science .......................................................................................... -

PROTOTYPE for QUADRUPED ROBOT USING Iot to DELIVER MEDICINES and ESSENTIALS to COVID-19 PATIENT
International Journal of Advanced Research in Engineering and Technology (IJARET) 4Volume 12, Issue 5, May 2021, pp. 147-155, Article ID: IJARET_12_05_014 Available online at https://iaeme.com/Home/issue/IJARET?Volume=12&Issue=5 ISSN Print: 0976-6480 and ISSN Online: 0976-6499 DOI: 10.34218/IJARET.12.5.2021.014 © IAEME Publication Scopus Indexed PROTOTYPE FOR QUADRUPED ROBOT USING IoT TO DELIVER MEDICINES AND ESSENTIALS TO COVID-19 PATIENT Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre Department of Information Technology, St. John College of Engineering and Management, Palghar, Maharashtra, India ABSTRACT The Wheeled robots cannot work properly on the rocky surface or uneven surface. They consume a lot of power and struggle when they go on rocky surface. To tackle the disadvantages of wheeled robot we replaced the wheels like shaped legs with the spider legs or spider arms. Quadruped robot has complicated moving patterns and it can also move on surfaces where wheeled shaped robots would fail. They can easily walk on rocky or uneven surface. The main purpose of the project is to develop a consistent platform that enables the implementation of steady and fast static/dynamic walking on ground/Platform to deliver medicines to covid-19 patients. The main advantage of spider robot also called as quadruped robot is that it is Bluetooth controlled robot, through the android application, we can control robot from anywhere; it avoids the obstacle using ultrasonic sensor. Key words: Bluetooth module, Quadruped, Rough-terrain robots. Cite this Article: Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre, Prototype for Quadruped Robot using IoT to Deliver Medicines and Essentials to Covid-19 Patient, International Journal of Advanced Research in Engineering and Technology, 12(5), 2021, pp.