JESD204B Survival Guide Practical JESD204B Technical Information, Tips, and Advice from the World’S Data Converter Market Share Leader*
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Overview of Signal Processing Techniques for Millimeter Wave MIMO Systems
1 An Overview of Signal Processing Techniques for Millimeter Wave MIMO Systems Robert W. Heath Jr., Nuria Gonzalez-Prelcic, Sundeep Rangan, Wonil Roh, and Akbar Sayeed Abstract Communication at millimeter wave (mmWave) frequencies is defining a new era of wireless com- munication. The mmWave band offers higher bandwidth communication channels versus those presently used in commercial wireless systems. The applications of mmWave are immense: wireless local and personal area networks in the unlicensed band, 5G cellular systems, not to mention vehicular area networks, ad hoc networks, and wearables. Signal processing is critical for enabling the next generation of mmWave communication. Due to the use of large antenna arrays at the transmitter and receiver, combined with radio frequency and mixed signal power constraints, new multiple-input multiple-output (MIMO) communication signal processing techniques are needed. Because of the wide bandwidths, low complexity transceiver algorithms become important. There are opportunities to exploit techniques like compressed sensing for channel estimation and beamforming. This article provides an overview of signal processing challenges in mmWave wireless systems, with an emphasis on those faced by using MIMO communication at higher carrier frequencies. I. INTRODUCTION The millimeter wave (mmWave) band is the frontier for commercial – high volume consumer – wireless communication systems [1]. MmWave makes use of spectrum from 30 GHz to 300 GHz whereas most arXiv:1512.03007v1 [cs.IT] 9 Dec 2015 R. W. Heath Jr. is with The University of Texas at Austin, Austin, TX, USA (email: [email protected]). Nuria Gonzalez- Prelcic is with the University of Vigo, Spain, (email: [email protected]). -

Sources and Compensation of Skew in Single-Ended and Differential Interconnects
Published on Signal Integrity Journal, www.signalintegrityjournal.com April 2017 Sources and Compensation of Skew in Single-Ended and Differential Interconnects Eben Kunz, Oracle Corp. Jae Young Choi, Oracle Corp. Vijay Kunda, Oracle Corp. Laura Kocubinski, Oracle Corp. Ying Li, Oracle Corp. Jason Miller, Oracle Corp. Gustavo Blando, Oracle Corp. Istvan Novak, Oracle Corp. Disclaimer: This presentation does not constitute as an endorsement for any specific product, service, company, or solution. 1 Published on Signal Integrity Journal, www.signalintegrityjournal.com April 2017 Abstract In high-speed signaling with embedded clock a few ps in-pair skew may cause serious signal degradations. Point-to-point topologies, long PCB traces put the emphases on local speed variations due to bends, glass- weave, deterministic and random asymmetries. First we analyze the contributors to the delay in single-ended traces. Length in differential pairs varies due to bends and turns. At each turn the outer trace has a little extra length. We show that using the center-line trace length can give a delay estimation error up to several ps. We will show how different turns, right angle, double 45-degree or arced turn, impact delay. Second, we look at practical ways of compensating skew. A few options are looked at and their performances compared. We consider a few statistical contributors to skew and establish a limit below which compensation makes no sense. The simulated data is illustrated by the measured performance of a few simple structures. Author(s) Biography Eben Kunz graduated from MIT in 2012 with a BS and Master's in EE. -

Lip Synchronization in Video Conferencing
C H A P T E R 7 Lip Synchronization in Video Conferencing Chapter 3, “Fundamentals of Video Compression,” went into detail about how audio and video streams are encoded and decoded in a video conferencing system. However, the last processing step in the end-to-end chain involves ensuring that the decoded audio and video streams play with perfect synchronization. This chapter focuses on audio and video; however, video conferencing systems can synchronize any type of media to any other type of media, including sequences of still images or 3D animation. Two issues complicate the process of achieving synchronization: ■ Real-time Transport Protocol (RTP)-based video conferencing systems separate audio and video into different RTP streams on the network. ■ Video conferencing systems also typically have separate processing pipelines for audio and video within the sender and receiver endpoints. This chapter covers the process of realigning those streams at the receiver. Understanding Lip Sync Skew Lip sync is the general term for audio/video synchronization, and literally refers to the fact that visual lip movements of a speaker must match the sound of the spoken words. If the video and audio displayed at the receiving endpoint are not in sync, the misalignment between audio and video is referred to as skew. Without a mechanism to ensure lip sync, audio often plays ahead of video, because the latencies involved in processing and sending video frames are greater than the latencies for audio. Human Perceptions User-perceived objection to unsynchronized media streams varies with the amount of skew— for instance, a misalignment of audio and video of less than 20 milliseconds (ms) is considered imperceptible. -

Design and Analysis of Circular Polarized Receiver Antenna As Video Stabilizer in UHF Television
International Journal of Computer Applications (0975 – 8887) Volume 175 – No. 30, November 2020 Design and Analysis of Circular Polarized Receiver Antenna as Video Stabilizer in UHF Television Jovy Rexiramdhan Farid Thalib Gunadarma University Center for Study of Sensor System and Measurement Depok, Indonesia Techniques Depok, Indonesia ABSTRACT the transmitter [1], such as if the television receiving antenna In analog terrestrial television systems received video is at a point where there are various television transmitters disturbances often occurs. Polarization parameters and around it. In addition, the determination of polarization radiation patterns are important things that are rarely orientation also considers natural aspects [3]. The use of considered in television antenna systems. In addition, the antennas with circular polarization and directional radiation Pulse synchronize parameter on the CVBS signal can be a patterns has been done by [4] which showed that Helical reference for the ongoing video stability. Researchers antennas have a long beam distance. However, as it is known conducted an experiment by designing and analyzing the that if the antenna direction does not match the position of the characteristics of a circular polarized Skew Planar Wheel beam, various disturbances will arise in the ongoing television (SPW) antenna and comparing it with a Dipole antenna which display. has linear polarization. Both of these antennas have Disturbances in analog television broadcasting systems, such omnidirectional radiation and are implemented parallel as as image shaking, scrolling until there is a shadow image analog terrestrial television receiver antennas at UHF effect or what is known as ghost images and other problems. frequencies. The test is performed by rotating the antenna tilt These disturbances occur when the polarization and radiation angle at 0º, 45º, 90º horizontally and 45º and 90º vertically to patterns of the receiving antenna do not match the direction of the direction of the transmitter. -

Static Skew Compensation in Multi Core Radio Over Fiber Systems for 5G Mmwave Beamforming
Static Skew Compensation in Multi Core Radio over Fiber systems for 5G Mmwave Beamforming Thomas Nikas (1), Evangelos Pikasis(2), Dimitris Syvridis(1) (1): Dept. of Informatics and Telecommunications National and Kapodistrian University of Athens, [email protected] (2): Eulambia Advanced technologies Ltd, [email protected] Abstract—Multicore fibers can be used for Radio over Fiber to some kilometers. A tolerant to environmental variations transmission of mmwave signals for phased array antennas in 5G solution is using multi-core fibers (MCFs) for RoF networks. The inter-core skew of these fibers distort the transmission instead of an SMF bundle. MCFs are less prone radiation pattern. We propose an efficient method to compensate the differential delays, without full equalization of the to effective length variations due to temperature and transmission path lengths, reducing the power loss and mechanical stress perturbations. Nevertheless, homogenous complexity. MCFs are reported to exhibit inter-core maximum static skew in the order of 0.5 ns/km, while the temperature imposed Keywords—Radio over fiber, Phased arrays, Beam steering. maximum dynamic skew is 0.06 ps/km/°C [3]. It is obvious from these figures that the major factor affecting the antenna I. INTRODUCTION radiation pattern is the value of the static inter-core skew. The he centralization of the Baseband Units (BBUs) and compensation of the static skew can be performed either in the Tsimplification of the remote radio heads (RRHs) are key optical or the electrical domain. Switchable optical delay lines elements for the forthcoming 5G networks. The bandwidth can be inserted at the output of the OBFN introducing requirements push the operating frequencies to mmwave and additional power loss. -

Federal Communications Commission Record 10 FCC Red No
FCC 95-315 Federal Communications Commission Record 10 FCC Red No. 20 L. Must Carry and Retransmission Consent 79 Before the V. THIRD NOTICE OF INQUIRY 86 Federal Communications Commission VI. CONCLUSION 88 Washington, D.C. 20554 ADMINISTRATIVE MATTERS 89 MM Docket No. 87-268 I. INTRODUCTION 1. With this Fourth Further Notice of Proposed Rule In the Matter of Making and Third Notice of Inquiry ("Notice"), we con tinue the process of moving toward the next era of broad cast television: digital broadcast television. In previous Advanced Television Systems orders in this Advanced Television ("ATV") 1 proceeding, and Their Impact Upon the our focus was on fostering the development of High Defini Existing Television Broadcast tion Television ("HDTV").2 With that focus we made a Service series of decisions regarding, among other things, the na ture of the ATV service, eligibility for ATV transition channels, and the transition period. Technological evolu FOURTH FURTHER NOTICE OF PROPOSED RULE tion now obliges us to revisit some of those decisions and MAKING AND THIRD NOTICE OF INQUIRY consider new information, which we do in this document. We tentatively conclude that many of our previous de Adopted: July 28, 1995; Released: August 9, 1995 cisions -- such as our decisions that initial eligibility for ATV transition channels should be limited to existing Comment Date: October 18, 1995 broadcasters - remain sound, even under the changed cir cumstances. We believe that a few decisions, however, re Reply Comment Date: December 4, 1995 quire renewed consideration, such as our requirement that broadcasters must ultimately use the transition channel By the Commission: Chairman Hundt, Commissioners primarily for HDTV. -

Radio Propagation Basics
Radio link Property of R. Struzak Radio transmission: 2 viewpoints RF LINES & AUXILIARY EQUIPMENT RF LINES & AUXILIARY EQUIPMENT EM wave Transmitter propagation path Receiver Energy radiated Energy received Input Signal Signal Output signal radiate received signal d Information EM wave Information source Transmitter propagation channel Receiver destination (Transmitting station) Signal transformations (Receiving station) Transmitter signal processing due to natural phenomena; Receiver signal processing attenuation, external noise/signals, fading, reflection, refraction, etc. Property of R. Struzak 34 Radio Link model Original message/ data Man-made Transmitter Processing T-antenna Natural onment Propagation medium EM wave Propagation Envir Process Other radio systems R-antenna Noise Receiver Man-made Processing Reconstructed message/ data Property of R. Struzak 35 Why consider propagation? 1. Could my system operate correctly (wanted signal)? • Required signal intensity/ quality of service over required distance/ area/ volume, given the geographic/ climatic region and time period 2. Could my system coexist with other systems (unwanted signals)? • Degradation of service quality and/ or service range/ area due to potential radio interference? – Will my system suffer unacceptable interference? – Will it produce such interference to other systems? Property of R. Struzak 36 Principal propagation effects 1. Basic energy spreading 2. Effects of obstructions (indoor, outdoor) 3. Effects of the ground 4. Tropospheric effects (outdoor) – clear air -

Serial Digital Interface (SDI) Megacore Function User Guide
Serial Digital Interface (SDI) MegaCore Function User Guide Serial Digital Interface (SDI) MegaCore Function User Guide 101 Innovation Drive San Jose, CA 95134 www.altera.com UG-SDI1005-16.0 Document last updated for Altera Complete Design Suite version: 12.1 Document publication date: February 2013 Feedback Subscribe © 2013 Altera Corporation. All rights reserved. ALTERA, ARRIA, CYCLONE, HARDCOPY, MAX, MEGACORE, NIOS, QUARTUS and STRATIX words and logos are trademarks of Altera Corporation and registered in the U.S. Patent and Trademark Office and in other countries. All other words and logos identified as trademarks or service marks are the property of their respective holders as described at www.altera.com/common/legal.html. Altera warrants performance of its ISO semiconductor products to current specifications in accordance with Altera's standard warranty, but reserves the right to make changes to any products and 9001:2008 services at any time without notice. Altera assumes no responsibility or liability arising out of the application or use of any information, product, or service Registered described herein except as expressly agreed to in writing by Altera. Altera customers are advised to obtain the latest version of device specifications before relying on any published information and before placing orders for products or services. February 2013 Altera Corporation Serial Digital Interface (SDI) MegaCore Function User Guide Contents Chapter 1. About This MegaCore Function Features . 1–1 Release Information . 1–2 Device Family Support . 1–2 General Description . 1–3 OpenCore Plus Evaluation . 1–5 Resource Utilization . 1–6 Chapter 2. Getting Started Design Flow . 2–1 SDI Walkthrough . -

Jitter Tracking Bandwidth Optimization Using Active-Inductor
JITTER TRACKING BANDWIDTH OPTIMIZATION USING ACTIVE-INDUCTOR- BASED BANDPASS FILTERING IN HIGH-SPEED FORWARDED CLOCK TRANSCEIVERS A Thesis by YANG LIU Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE May 2011 Major Subject: Electrical Engineering JITTER TRACKING BANDWIDTH OPTIMIZATION USING ACTIVE-INDUCTOR- BASED BANDPASS FILTERING IN HIGH-SPEED FORWARDED CLOCK TRANSCEIVERS A Thesis by YANG LIU Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Approved by: Chair of Committee, Samuel Palermo Committee Members, Jose Silva-Martinez Peng Li William M. Lively Head of Department, Costas Georghiades May 2011 Major Subject: Electrical Engineering iii ABSTRACT Jitter Tracking Bandwidth Optimization Using Active-Inductor-Based Bandpass Filtering in High-Speed Forwarded Clock Transceivers. (May 2011) Yang Liu, B.S., Beijing University of Posts and Telecommunications Chair of Advisory Committee: Dr. Samuel Palermo Inter-chip input-output (I/O) communication bandwidth demand, which rapidly scaled with integrated circuit scaling, requires high performance I/O links to achieve a per pin data rate as high as multi-Gb/s. The design of high-speed links employing forwarded-clock architecture enables jitter tracking between data and clock from low to high frequencies. Considering the impact of clock to data skew, high frequency sampling clock jitter and data jitter become out of phase at receiver, which reduces the timing margin and limits the data rate. The jitter tracking bandwidth (JTB) between data and clock should be optimized to compensate the clock to data skew. -
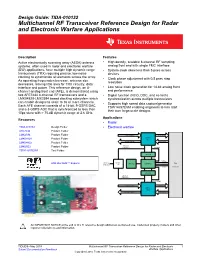
Multichannel RF Transceiver Reference Design for Radar and Electronic Warfare Applications
Design Guide: TIDA-010132 Multichannel RF Transceiver Reference Design for Radar and Electronic Warfare Applications Description Features Active electronically scanning array (AESA) antenna • High density, scalable 8-channel RF sampling systems, often used in radar and electronic warfare analog front end with single FMC interface (EW) applications, have multiple high dynamic range • System clock skew less than 5 psec across transceivers (TRX) requiring precise, low-noise devices clocking to synchronize all elements across the array. • Clock phase adjustment with 0.5 psec step As operating frequencies increase, antenna size resolution decreases, leaving little area for TRX circuitry, data interface and power. This reference design, an 8- • Low noise clock generation for 14-bit analog front channel analog front end (AFE), is demonstrated using end performance two AFE7444 4-channel RF transceivers and a • Digital function (NCO, DDC, and so forth) LMK04828-LMX2594 based clocking subsystem which synchronization across multiple transceivers can enable designs to scale to 16 or more channels. • Supports high speed data capture/generator Each AFE channel consists of a 14-bit, 9-GSPS DAC TSW14J57EVM enabling engineers to kick start and a 3-GSPS ADC that is synchronized to less than their own large-scale designs 10ps skew with > 75-dB dynamic range at 2.6 GHz. Applications Resources • Radar TIDA-010132 Design Folder • Electronic warfare AFE7444 Product Folder LMX2594 Product Folder Analog Inputs JESD x8 RX AFE7444 LMK04828 Product Folder AFE1 LMK04832 Product Folder Analog Outputs JESD x8 TX DEVCLK LMK61E2 Product Folder or REFCLK SYSREF TSW14J57EVM Tool Folder LMX2594 SYSREF Multiplier ASK Our E2E™ Experts DEVCLK LMK61E2 LMK04828 FMC or REFCLK X3 + SYNC Connector LMX2594 DEVCLK or REFCLK SYSREF Analog Inputs JESD x8 RX AFE7444 AFE2 Analog Outputs JESD x8 TX An IMPORTANT NOTICE at the end of this TI reference design addresses authorized use, intellectual property matters and other important disclaimers and information. -

Eumc: High-Throughput Satellite Connectivity for the Constant Contact Vehicle
Proceedings of the 48th European Microwave Conference High-Throughput Satellite Connectivity for the Constant Contact Vehicle Ryan A. Stevenson#1, David Fotheringham#2, Tom Freeman#3, Turner Noel#4, Tim Mason#5, Shahram Shafie#6 #Kymeta Corporation, USA {1ryan, 2dfotheringham, 3TomF, 4tnoel, 5tmason, 6sshafie}@kymetacorp.com Abstract — The modern automobile is an artificial Table 1. Key performance metrics for a practical vehicle satellite terminal intelligence computer requiring constant contact with data networks to upload vehicle data and maintain the processing Feature Requirement Description platform with software and firmware updates. 5G roll-out must Data > 10 Mbps Two-way VOIP, multi- include non-terrestrial networks (NTNs) to augment terrestrial Throughput cast content, HD video cellular networks and achieve constant contact. We have Tracking > 15 degrees/sec Track through typical commercialized a satellite vehicle terminal based on a novel, flat- Rate driving maneuvers panel, electronically scanned, metamaterials antenna technology Profile < 2.5 cm thick Interior mounting flush to (MSAT) that makes high-throughput satellite connectivity to the the roof line consumer automobile a practical reality. Weight < 5 Kg Safe mounting in the roof Keywords — Electromagnetic metamaterials, satellite Power < 100 W @ 12 VDC Compatible with vehicle antennas, mobile antennas, leaky wave antennas, low earth orbit power delivery system satellites, 5G mobile communication. Temperature -40° C to +80° C Operational (survivable) (+105° C) temperature range I. INTRODUCTION Reliability Automotive grade 10-year useful life typical The modern automobile, beyond simply being a conveyance, is an artificial intelligence (AI) system that We have addressed these critical requirements by performs massive sensor fusion and deep learning to commercializing a novel, electronically-scanned antenna completely understand it’s environment and make driving technology based on a diffractive metamaterials concept, decisions autonomously. -

Assessment of Multipath and Shadowing Effects on UHF Band in Built-Up Environments
Assessment of Multipath and Shadowing Effects on UHF Band in Built-up Environments 1 1 2 3 A. A. Jimoh , N. T. Surajudeen-Bakinde , N. Faruk , 0. W. Bello 1Department of Electrical and Electronics Engineering, University of florin 2Department of Telecommunication Science, University of florin 3Department of Information and Communication Science, University of florin Abstract Ultra-high frequency (UHF) bands are radio frequencies in the range of300 MHz and 3 GHz. These bands are used for television broadcasting, mobile cellular systems, Wi-Fi, satellite communications and many others. Effective communication link in the UHF band requires direct line of sight between the transmitters and receivers. However, this is not always the case in built-up areas where diverse obstacles such as large buildings, trees, moving objects and hills are present along the communication path. These obstacles result in signal degradation as a result of shadowing (blockages) and multipath, which are two major causes of signal losses. Path loss models are used in predicting signal losses but, the accuracy ofthese models depend on the fitness between the model's predictions and measured loses. In this work, the multipath and shadowing effects on signal impairment were investigated through the use of empirical and semi-empirical path loss models analysis in built-up environments. Electromagnetic field strength measurements were conducted using four television transmitters at UHF bands along four major routes of Osun State, Nigeria. Experimental and simulation results indicated that the empirical models provide a better fit than the semi-empirical models. It was also found that the poor performance ofthe Knife Edge Model which is a semi-empirical model was traced to the bases of its formulation, which assumed point like knife edge for all obstacles on the path of radio propagation.