Selecting Transformer Compensation Settings for Secure Differential Protection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mutual Inductance and Transformer Theory Questions: 1 Through 15 Lab Exercise: Transformer Voltage/Current Ratios (Question 61)
ELTR 115 (AC 2), section 1 Recommended schedule Day 1 Topics: Mutual inductance and transformer theory Questions: 1 through 15 Lab Exercise: Transformer voltage/current ratios (question 61) Day 2 Topics: Transformer step ratio Questions: 16 through 30 Lab Exercise: Auto-transformers (question 62) Day 3 Topics: Maximum power transfer theorem and impedance matching with transformers Questions: 31 through 45 Lab Exercise: Auto-transformers (question 63) Day 4 Topics: Transformer applications, power ratings, and core effects Questions: 46 through 60 Lab Exercise: Differential voltage measurement using the oscilloscope (question 64) Day 5 Exam 1: includes Transformer voltage ratio performance assessment Lab Exercise: work on project Project: Initial project design checked by instructor and components selected (sensitive audio detector circuit recommended) Practice and challenge problems Questions: 66 through the end of the worksheet Impending deadlines Project due at end of ELTR115, Section 3 Question 65: Sample project grading criteria 1 ELTR 115 (AC 2), section 1 Project ideas AC power supply: (Strongly Recommended!) This is basically one-half of an AC/DC power supply circuit, consisting of a line power plug, on/off switch, fuse, indicator lamp, and a step-down transformer. The reason this project idea is strongly recommended is that it may serve as the basis for the recommended power supply project in the next course (ELTR120 – Semiconductors 1). If you build the AC section now, you will not have to re-build an enclosure or any of the line-power circuitry later! Note that the first lab (step-down transformer circuit) may serve as a prototype for this project with just a few additional components. -

The Overall Power Factor Test: In-Depth
The Overall Power Factor Test: In-Depth © OMICRON Page 1 Copyrighted 2019 by OMICRON electronics Corp USA All rights reserved. No part of this presentation may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording, or any information storage or retrieval system or method, now known or hereinafter invented or adopted, without the express prior written permission of OMICRON electronics Corp USA. © OMICRON © OMICRON Page 2 Author Biography © OMICRON Page 3 Transformer Testing Support Contacts Brandon Dupuis Fabiana Cirino Logan Merrill Charles Sweetser Primary Application Engineer Application Engineer Primary Application Engineer PRIM Engineering Services Manager OMICRON electronics Corp. USA OMICRON electronics Corp. USA OMICRON electronics Corp. USA OMICRON electronics Corp. USA 60 Hickory Drive 60 Hickory Drive 3550 Willowbend Blvd. 60 Hickory Drive Waltham MA 02451 | UNITED STATES Waltham MA 02451 | USA Houston, TX 77054 | USA Waltham MA 02451 | USA T +1 800 OMICRON T +1 800 OMICRON T +1 800 OMICRON T +1 800 OMICRON T +1 781 672 6214 T +1 781 672 6230 T +1 713 212 6154 T +1 781 672 6216 M +1 617 901 6180 M +1 781 254 8168 M +1 832 454 6943 M +1 617 947 6808 [email protected] [email protected] [email protected] [email protected] www.omicronusa.com www.omicronenergy.com www.omicronenergy.com www.omicronenergy.com © OMICRON Page 4 2019 OMICRON Academy Transformer Trainings January 30th and 31st – Houston, TX https://www.omicronenergy.com/en/events/training/detail/electrical-diagnostic- -
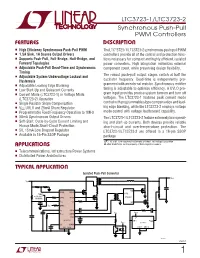
LTC3723-1/LTC3723-2 Synchronous Push-Pull PWM Controllers
LTC3723-1/LTC3723-2 Synchronous Push-Pull PWM Controllers FEATURES DESCRIPTIO U ■ High Efficiency Synchronous Push-Pull PWM The LTC®3723-1/LTC3723-2 synchronous push-pull PWM ■ 1.5A Sink, 1A Source Output Drivers controllers provide all of the control and protection func- ■ Supports Push-Pull, Full-Bridge, Half-Bridge, and tions necessary for compact and highly efficient, isolated Forward Topologies power converters. High integration minimizes external ■ Adjustable Push-Pull Dead-Time and Synchronous component count, while preserving design flexibility. Timing The robust push-pull output stages switch at half the ■ Adjustable System Undervoltage Lockout and Hysteresis oscillator frequency. Dead-time is independently pro- ■ Adjustable Leading Edge Blanking grammed with an external resistor. Synchronous rectifier ■ Low Start-Up and Quiescent Currents timing is adjustable to optimize efficiency. A UVLO pro- ■ Current Mode (LTC3723-1) or Voltage Mode gram input provides precise system turn-on and turn off (LTC3723-2) Operation voltages. The LTC3723-1 features peak current mode ■ Single Resistor Slope Compensation control with programmable slope compensation and lead- ■ ing edge blanking, while the LTC3723-2 employs voltage VCC UVLO and 25mA Shunt Regulator ■ Programmable Fixed Frequency Operation to 1MHz mode control with voltage feedforward capability. ■ 50mA Synchronous Output Drivers The LTC3723-1/LTC3723-2 feature extremely low operat- ■ Soft-Start, Cycle-by-Cycle Current Limiting and ing and start-up currents. Both devices provide reliable Hiccup Mode Short-Circuit Protection short-circuit and overtemperature protection. The ■ 5V, 15mA Low Dropout Regulator LTC3723-1/LTC3723-2 are offered in a 16-pin SSOP ■ Available in 16-Pin SSOP Package package. -

132Kv Oil Impregnated Paper Bushing Transformer - Design by CAD, Analysed by FEM
Universal Journal of Electrical and Electronic Engineering 6(5A): 86-93, 2019 http://www.hrpub.org DOI: 10.13189/ujeee.2019.061510 132kV Oil Impregnated Paper Bushing Transformer - Design by CAD, Analysed by FEM N. Abd. Rahman1,*, M. Isa1, M. N. K. H. Rohani1, H A. Hamid1, Mohd Mustafa Al Bakri Abdullah2 1Center for Electrical System Engineering Studies, Universiti Malaysia Perlis, Malaysia 2Centre of Excellence Geopolymer and Green Technology, University Malaysia Perlis, Malaysia Received September 4, 2019; Revised December 12, 2019; Accepted December 24, 2019 Copyright©2019 by authors, all rights reserved. Authors agree that this article remains permanently open access under the terms of the Creative Commons Attribution License 4.0 International License Abstract The Electric Field and Voltage Distribution value is, the higher the price of transformer is. Transformer (EFVD) are an important parameter for assessing high used to step up the value of voltage or vise versa. voltage bushing transformer performance. However, Stepping up transformer or power transformer normally used at generation station increases the value of voltage conducting laboratories experiment is dangerous, difficult before transmitting it to many places. Normally, the and expensive due to several aspects. Therefore, Finite values of voltage practices by Tenaga Nasional Berhad Element Method (FEM) software is the best option used (TNB) for their transmission are 132kV, 275kV and 500kV. as a tool for the assessment of bushing transformer's On the other hand, stepping down transformer or performance in terms of EFVD. But, before an assessment distribution transformer is used to reduce the value of of analysis could be carried out, an accurate model of voltage depending on consumer requirement. -

THE ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE the ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE
THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE Mitch Tilbury New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2008 by The McGraw-Hill Companies, Inc. All rights reserved. Manufactured in the United States of America. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. 0-07-159589-9 The material in this eBook also appears in the print version of this title: 0-07-149737-4. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. For more information, please contact George Hoare, Special Sales, at [email protected] or (212) 904-4069. TERMS OF USE This is a copyrighted work and The McGraw-Hill Companies, Inc. (“McGraw-Hill”) and its licensors reserve all rights in and to the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of 1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble, reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute, disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill’s prior consent. -

Instruction Manual Installation Operation Copyright © 2012 Kato Engineering, Inc
Instruction Manual Installation Operation Copyright © 2012 Kato Engineering, Inc. All rights reserved Maintenance Motor-Generator Set Synchronous Common Shaft Publication 350-03006-00 (07/18/2012) Kato Engineering, Inc. | P.O. Box 8447 | Mankato, MN USA 56002-8447 | Tel: 507-625-4011 [email protected] | www.KatoEngineering.com | Fax: 507-345-2798 Copyright © 2012 Kato Engineering, Inc. All rights reserved Page 1 Table of Contents Introduction............................................................................... 4 Foreword..................................................................................... 4 Safety instructions.......................................................................4 Ratings/description......................................................................4 Construction and Operating Principles.................................. 5 Stator...........................................................................................5 Rotor........................................................................................... 5 Brushless exciters....................................................................... 6 Installation................................................................................. 7 Receiving inspection................................................................... 7 Unpacking and moving............................................................... 7 Location...................................................................................... 7 Mounting.................................................................................... -

Current Transformer Theory & Testing
Current Transformer Theory & Testing Hands On Relay School 2016 Jay Anderson – Omicron [email protected] www.OmicronEnergy.com Agenda • Introduction • Current Transformer Basics • Construction & Types • Industry Standards • Applications • Testing Current Transformer Basics © OMICRON Page 3 Function of Current Transformers • Convert Primary Power Signals to Manageable Values for • Indicating Meters • Revenue Metering • Protective Relay Systems • Power Generation • Plant Monitoring Systems • Fault Recorders • SCADA • Overall Electric Grid Monitoring (Local Dispatch & ISO Level) • Building (Energy) Management Systems (HVAC,refrigeration...) • Load Control January 19, 2016 Page: 4 Current Transformers • Insulation from High Voltages and Currents • Isolation from other systems • Safety • Standardization • Accuracy ( Ratio & Phase) • Typically Low Power Rating • Thermal Considerations • Burden Considerations January 19, 2016 Page: 5 Current Transformers • Insulation Consistent With Voltage Use • Wide Range of Current to Replicate (Unlike VTs) • Metering or Protective Class Ratings • Typically Unprotected • Dangerous When Open Circuited January 19, 2016 Page: 6 Compliance & Standards Instrument Transformers Are Expected to Perform & Conform IEEE ANSI IEC in Europe & Asia NERC Reliability Standards in US Supported standards • IEEE C57.13 standard requirements for instrument transformers • IEEE C57.13.6 standard for high-accuracy instrument transformers • IEC 60044-1 current transformers • IEC 60044-6 requirements for protective current -
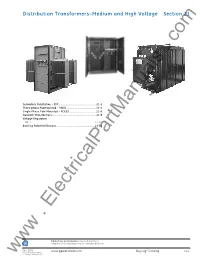
Distribution Transformers–Medium and High Voltage Section 21
Distribution Transformers–Medium and High Voltage Section 21 com . Secondary Substation – SST .....................................................21-2 Three-phase Padmounted – PADS ..........................................21-4 Single-Phase Pole-Mounted – POLES......................................21-6 Network Transformers ..............................................................21-9 Voltage Regulators VR-1 .............................................................................................................21-10 Bushing Potential Devices......................................................21-13 ElectricalPartManuals . Publications and Reference: See Section 22 for a complete list of additional product-related publications Rev. 1/08 ® 21-1 Prices and data subject www.geelectrical.com BuyLog Catalog wwwto change without notice Distribution Transformers–Medium and High Voltage Section 21 GE-PROLEC® Liquid Filled Secondary Substation Transformers-SST GE-PROLEC® Secondary Substation Transformers will meet all of your industrial applications for power distribution. These transformers have a robust construction and are designed with the capability to coordinate with a wide diversity of equipment such as switchboards, LIS, MCCs, etc. com Applications Industrial . —Oil and Gas —Chemical Industry —Paper Industry —Steel Industry —Cement Industry Commercial —Airports —Stadiums —Office Building —Waste Water General Construction Features —Stores —The liquid insulated, secondary type substation transformer Utility is designed, manufactured -

B. Tech Electrical.Pdf
JECRC University Course Structure for Electrical Engineering (B.Tech.) JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester III Subject Code Subject Contact Hrs Credits L-T-P Electronics Devices & Circuits 3-1-2 5 Circuit Analysis – I 3-1-0 4 Electrical Machines – I 3-1-2 5 Electrical Measurements 3-1-2 5 Mathematics – III 3-1-0 4 Computer Programming – I 3-0-2 4 Total 18-5-8 27 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester IV Subject Code Subject Contact Hrs Credits L-T-P Analogue Electronics 3-1-2 5 Digital Electronics 3-0-2 4 Circuit Analysis – II 3-1-0 4 Electrical Machines – II 3-1-2 5 Advanced Mathematics 3-1-0 4 Generation of Electric Power 3-0-0 3 Total 18-4-6 25 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester V Subject Code Subject Contact Hrs Credits L-T-P Power Electronics-I 3-1-2 5 Microprocessor & Computer 3-0-2 4 Architecture Transmission & Distribution – I 3-1-0 4 Control Systems 3-1-2 5 Utilization of Electrical Power 3-0-0 3 Digital Signal Processing 3-0-0 3 Total 18-3-6 24 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester VI Subject Code Subject Contact Hrs Credits L-T-P Power Electronics –II 3-1-2 5 Power System Analysis 3-1-2 5 EHV AC/DC Transmission 3-0-0 3 Switch Gear & protection 3-0-0 3 Instrumentation 3-0-0 3 Transmission & Distribution – II 3-1-0 4 Economics 0-0-2 1 -
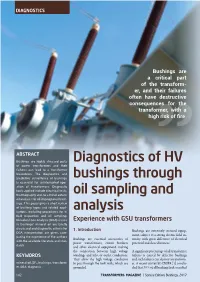
Diagnostics of HV Bushings Through Oil Sampling and Analysis
DIAGNOSTICS Bushings are a critical part of the transform- er, and their failures often have destructive consequences for the transformer, with a high risk of fire ABSTRACT Bushings are highly stressed parts Diagnostics of HV of power transformers and their failures can lead to a transformer breakdown. The diagnostics and predictive surveillance of bushings bushings through is essential for uninterrupted oper- ation of transformers. Diagnostic tools applied include electrical tests, oil sampling and thermography and, to a minor extent, oil analysis for oil-impregnated bush- ings. This paper gives a short review of bushing types and related appli- analysis cations, including procedures for in field inspection and oil sampling. Dissolved Gas Analysis (DGA) issues Experience with GSU transformers in bushings’ mineral oil are briefly discussed and diagnostic criteria for 1. Introduction DGA interpretation are given, com- Bushings are extremely stressed equip ment, subject to a strong electric field in paring the experience of the authors Bushings are essential accessories of tensity with great difference of electrical with the available literature and stan- powe r transformers, circuit breakers potential and close distances. dards. and other electrical equipment, making the connection between high voltage A significant percentage of all transformer KEYWORDS wind ings and inlet or outlet conductors. failures is caused by defective bushings They allow the high voltage conductor and such failures can destroy a transform mineral oil, SF6, bushings, transform- to pass through the tank walls, which are er. A recent survey by CIGRE [1] conclu er, DGA, diagnosis ground ed. ded that 30 % of all bushing faults resulted 142 TRANSFORMERS MAGAZINE | Special Edition: Bushings, 2017 Riccardo ACTIS, Riccardo MAINA, Vander TUMIATTI in transformer fire and 10 % in burst or er dissipation factors than OIP and RIP transformer tank, during outage periods, explosion. -
Module Ten: Transformers; Basic Electricity and Electronics Individualized Learning System
DOCUMENT RESUME ED 099 507 CE 002 584 mITLE Module Ten: Transformers; Basic Electricity and Electronics Individualized Learni.ng System. INSTITUTION Bureau of Naval Personnel, Washington, D.C. REPORT NO NAVPERS-94558-10a PUB DATE Jan 72 NOTE 135p.; For other modules in the series, see CE 002 573-589 EDRS PRICE MF-$0.75 HC-$6.60 PLUS POSTAGE DESCRIPTORS Course Content; *Electricity;*Electronics; Individualized Instruction; Individualized Programs; Industrial Education; Military Training; Post Secondary Education; *Programed Instruction; *Programed Materials; Study Guides; Trade and Industrial Education; Units of Study (Subject Fields) ABSTRACT The module introduces a very importantelectrical device, the transformer. The module is dividedinto six lessons: transformer construction, transformertheory and operation, turns and voltage ratios, power and current, transformerefficiency, and semiconductor rectifiers. Each lesson consistsof an overview, a list of study resources, lesson narratives,programed instructional materials, and lesson summaries. (Author/BP) N AVPERS 94558-10a S Or 01 .11 ALtH F01.1( Al of.. &1St NATION:, ,NST111211. OF 1.,L.SI!)... BASIC ELECTRICITY AND ELECTRONICS INDIVIDUALIZED LEARNING SYSTEM MODULE TEN TRANSFORMERS Study llooklet BUREAU OF NAVAL PERSONNEL January 1972 OVERVIEW MODULE TEN TRANSFORMERS In this module you will be introduced to a very important electrical device, the transformer. As you will learn, without transformer action the practical, economical application of electrical energy would be nearly impossible. For you to more easily learn the above, this module has been divided into the following six lessons: Lesson I. Transformer Construction Lesson II. Transformer Theory and Operation Lesson III. Turns and Voltage Ratios Lesson IV. Power and Current Lesson V. Transformer Efficiency Lesson VI. -

Theory and Technology of Instrument Transformers
THEORY AND TECHNOLOGY OF INSTRUMENT TRANSFORMERS TRAINING BOOKLET: 2 The information in this document is subject to change. Contact ARTECHE to confi rm the characteristics and availability of the products described here. Jaime Berrosteguieta / Ángel Enzunza © ARTECHE Moving together CONTENTS 1. Instrument Transformers | 4 5. Other Instrument Transformers | 31 1.1. Defi nitions | 4 5.1. Combined Instrument 1.2. Objective | 4 Transformers | 31 1.3. General Points in 5.2. Capacitive Voltage Current Transformers | 5 Transformers (CVT) | 32 1.4 General Points in Voltage Transformers | 6 6. Dielectric insulation | 33 6.1. Insulation of instrument 2. Theory of Instrument Transformers | 7 transformers | 33 2.1. Basics | 7 6.2. Insulation Testing | 34 2.2. Equivalent Transformer | 8 2.3. Equivalent Transformer Standards | 35 circuit Diagram | 8 7. 7.1. Standards Consulted | 35 7.2. Insulation Levels | 35 3. Current Transformers | 9 7.3. Environmental Conditions | 35 3.1. General Equations | 9 7.4. Current Transformers | 36 3.2. Vectorial Diagram | 9 7.5. Voltage Transformers | 43 3.3. Current & Phase Errors | 10 3.4. Current Transformers for Measuring | 12 3.5. Current Transformers for Protection | 14 3.6. Current Transformers for Protection which Require Transient Regime Response | 16 3.7. Burden | 18 3.8. Resistance to Short-circuits | 19 3.9. Operation of an Open Circuit Current Transformer| 20 3.10. Special Versions of Current Transformers | 20 3.11. Choosing a Current Transformer | 21 4. Voltage Transformers | 22 4.1. General Equations | 22 4.2. Vectorial Diagram | 22 4.3. Voltage & Phase Errors | 23 4.4. Voltage Transformers for Measuring | 24 4.5.