Intermediate Technical Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Summary of Mass Lead Poisoning Incidents
Summary of Mass Lead Poisoning Incidents Lead has been used for thousands of years in products including paints, gasoline, cosmetics, and even children’s toys, but lead battery production is by far the largest consumer of lead. Although chronic exposures to lead affect both children and adults, there have also been many reports of localized mass acute lead poisonings. Below we outline some of the largest lead poisoning incidents related to the manufacturing and recycling of lead batteries that have been reported since 1987. Shanghai, China 2011 Twenty-five children living in Kanghua New Village were found to have elevated blood lead levels. At least ten of these children were hospitalized for treatment. As a result, the Shanghai Environmental Protection Bureau shut down two factories for additional investigations that are reportedly located approximately 700 meters away from the village. One of the two factories was a lead battery manufacturing plant operated by the U.S. company, Johnson Controls. The other, Shanghai Xinmingyuan Automobile Accessory Co., made lead-containing wheel weights. Jiangsu Province, China 2011 One-third of the employees at Taiwanese-owned Changzhou Ri Cun Battery Technology Company in eastern Jiangsu province were found with elevated BLLs between 28- 48ug/dL. All employees of the lead battery plant were tested after a pregnant employee discovered through testing her BLL was twice the level of concern. Production at the factory was temporarily suspended. Yangxunqiao, Zhejiang Province, China 2011 More than 600 people (including 103 children) working in and living around a cluster of aluminum foil fabricating workshops were found with excessive blood lead levels (BLLs). -

Gyrinidae: Rediscovery of Metagyrinus Sinensis (Ochs) and Taxonomic Notes on the Genus (Coleoptera) 43-47 © Wiener Coleopterologenverein, Zool.-Bot
ZOBODAT - www.zobodat.at Zoologisch-Botanische Datenbank/Zoological-Botanical Database Digitale Literatur/Digital Literature Zeitschrift/Journal: Water Beetles of China Jahr/Year: 2003 Band/Volume: 3 Autor(en)/Author(s): Mazzoldi Paolo, Jäch Manfred A. Artikel/Article: Gyrinidae: Rediscovery of Metagyrinus sinensis (Ochs) and taxonomic notes on the genus (Coleoptera) 43-47 © Wiener Coleopterologenverein, Zool.-Bot. Ges. Österreich, Austria; download unter www.biologiezentrum.at JÄcn & Jl (ccis.): Water Beetles of China Vol. Ill 43 - 47 Wien, April 2003 GYRINIDAE: Rediscovery of Metagyrinus sinensis (OCHS) and taxonomic notes on the genus (Coleoptera) P. MAZZOLDI & M.A. JACH Abstract The rediscovery of Metagyrinus sinensis (OCHS, 1924) (Coleoptera: Gyriniclac) after 70 years is reported. Problems concerning the interpretation of the type locality of M. sinensis are discussed. Female characters are described for the first time. Some taxonomic considerations on the genus are briefly presented. Key words: Coleoptera, Gyrinidae, Metagyrinus sinensis, China, Guangdong. Introduction Metagyrinus sinensis (Fig. 1) was described from Guangdong (southeastern China) by OCHS (1924); it had been assigned by the same author to the new genus Paragyrinus together with two other species, previously attributed to Aulonogyrus: P. arrowi (R.EGIMBART, 1907) from the Himalayan region and P. vitalisi (PESCHET, 1923) from Laos; subsequently, BRINCK (1955) introduced the replacement name Metagyrinus, since the generic name was preoccupied by a fossil genus, Paragyrinus HANDLIRSCH, 1908. Besides the type specimens (2 c?d\ deposited in the Forschungsinstitut Senckenberg, Frankfurt/Main) we know of only one additional record for this species, published by OCHS (1936), who mentions its presence in the collection of Yenching University, Amoy [= Xiamen, Fujian], without specifying exact locality, or number and sex of specimens. -

The Superfamily Calopterygoidea in South China: Taxonomy and Distribution. Progress Report for 2009 Surveys Zhang Haomiao* *PH D
International Dragonfly Fund - Report 26 (2010): 1-36 1 The Superfamily Calopterygoidea in South China: taxonomy and distribution. Progress Report for 2009 surveys Zhang Haomiao* *PH D student at the Department of Entomology, College of Natural Resources and Environment, South China Agricultural University, Guangzhou 510642, China. Email: [email protected] Introduction Three families in the superfamily Calopterygoidea occur in China, viz. the Calo- pterygidae, Chlorocyphidae and Euphaeidae. They include numerous species that are distributed widely across South China, mainly in streams and upland running waters at moderate altitudes. To date, our knowledge of Chinese spe- cies has remained inadequate: the taxonomy of some genera is unresolved and no attempt has been made to map the distribution of the various species and genera. This project is therefore aimed at providing taxonomic (including on larval morphology), biological, and distributional information on the super- family in South China. In 2009, two series of surveys were conducted to Southwest China-Guizhou and Yunnan Provinces. The two provinces are characterized by karst limestone arranged in steep hills and intermontane basins. The climate is warm and the weather is frequently cloudy and rainy all year. This area is usually regarded as one of biodiversity “hotspot” in China (Xu & Wilkes, 2004). Many interesting species are recorded, the checklist and photos of these sur- veys are reported here. And the progress of the research on the superfamily Calopterygoidea is appended. Methods Odonata were recorded by the specimens collected and identified from pho- tographs. The working team includes only four people, the surveys to South- west China were completed by the author and the photographer, Mr. -

BP Neural Network Based Prediction of Potential Mikania Micrantha
se t Re arc s h: re O o p Qiu et al., Forest Res 2018, 7:1 F e f n o A DOI: 10.4172/2168-9776.100021 l 6 c a c n e r s u s o J Forest Research: Open Access ISSN: 2168-9776 Research Article Open Access BP Neural Network Based Prediction of Potential Mikania micrantha Distribution in Guangzhou City Qiu L1,2, Zhang D1,2, Huang H3, Xiong Q4 and Zhang G4* 1School of Geosciences and Info-Physics, Central South University, Hunan, Changsha, China 2Key Laboratory of Metallogenic Prediction of Nonferrous Metals and Geological Environment Monitor (Central South University), Ministry of Education, Changsha, China 3Shengli College of China University of Petroleum, Shandong, Dongying, China 4Central South University of Forestry and Technology, Hunan, Changsha, China *Corresponding author: Zhang G, Central South University of Forestry and Technology, Hunan, Changsha, China, Tel: 9364682275; E-mail: [email protected] Received date: January 16, 2018; Accepted date: February 09, 2018; Published date: February 12, 2018 Copyright: © 2018 Qiu L, et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited. Abstract To predict the distribution of Mikania micrantha, one of the most harmful invasive plants in Guangzhou City, the author selected relevant environmental factors and established a feasible simple model based on BP neural network to use its strong nonlinear ability in this -

Report on Domestic Animal Genetic Resources in China
Country Report for the Preparation of the First Report on the State of the World’s Animal Genetic Resources Report on Domestic Animal Genetic Resources in China June 2003 Beijing CONTENTS Executive Summary Biological diversity is the basis for the existence and development of human society and has aroused the increasing great attention of international society. In June 1992, more than 150 countries including China had jointly signed the "Pact of Biological Diversity". Domestic animal genetic resources are an important component of biological diversity, precious resources formed through long-term evolution, and also the closest and most direct part of relation with human beings. Therefore, in order to realize a sustainable, stable and high-efficient animal production, it is of great significance to meet even higher demand for animal and poultry product varieties and quality by human society, strengthen conservation, and effective, rational and sustainable utilization of animal and poultry genetic resources. The "Report on Domestic Animal Genetic Resources in China" (hereinafter referred to as the "Report") was compiled in accordance with the requirements of the "World Status of Animal Genetic Resource " compiled by the FAO. The Ministry of Agriculture" (MOA) has attached great importance to the compilation of the Report, organized nearly 20 experts from administrative, technical extension, research institutes and universities to participate in the compilation team. In 1999, the first meeting of the compilation staff members had been held in the National Animal Husbandry and Veterinary Service, discussed on the compilation outline and division of labor in the Report compilation, and smoothly fulfilled the tasks to each of the compilers. -

Annual Report 2019 Annual Report 2019 3
CONTENTS Five Years Financial Summary 2 Report of the Directors 74 Financial Highlights 3 Independent Auditor’s Report 81 Corporate Profile 4 Consolidated Income Statement 86 Location Maps of Projects 6 Consolidated Statement of Comprehensive Income 87 Chairman’s Statement 14 Consolidated Balance Sheet 88 Management Discussion and Analysis 22 Consolidated Statement of Cash Flows 90 Investor Relations Report 56 Consolidated Statement of Changes in Equity 91 Directors’ Profiles 59 Notes to the Consolidated Financial Statements 93 Corporate Governance Report 62 Corporate and Investor Relations Information 182 Yuexiu Transport Infrastructure Limited Yuexiu Transport Infrastructure Limited 2 Annual Report 2019 Annual Report 2019 3 FIVE YEARS FINANCIAL SUMMARY INCOME STATEMENT Year ended 31 December (RMB’000) 2019 2018 2017 2016 2015 Income from operations 3,023,221 2,847,073 2,702,844 2,519,003 2,226,023 Earnings before interests, tax, depreciation and amortisation (“EBITDA”)1 2,956,565 2,855,785 2,722,179 2,356,181 2,037,563 Profit before income tax 1,900,445 1,891,655 1,638,417 1,520,564 869,932 Profit for the year 1,595,043 1,411,681 1,267,222 1,166,477 653,022 Profit attributable to: Shareholders of the Company 1,137,590 1,054,135 947,942 918,817 532,086 Non-controlling interests 457,453 357,546 319,280 247,660 120,936 Basic earnings per share for profit attributable to the shareholders of the Company RMB0.6799 RMB0.6300 RMB0.5666 RMB0.5491 RMB0.3180 Dividend per share RMB0.3500 RMB0.3375 RMB0.2970 RMB0.2885 RMB0.2296 BALANCE SHEET As at -
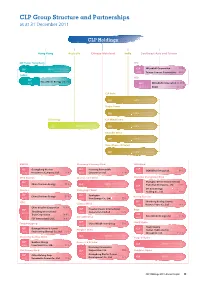
CLP Group Structure and Partnerships As at 31 December 2011
CLP Group Structure and Partnerships as at 31 December 2011 CLP Holdings Hong Kong Australia Chinese Mainland India Southeast Asia and Taiwan CLP Power Hong Kong HPC Mitsubishi Corporation 20% CLP 100% CLP 20% Taiwan Cement Corporation 60% CAPCO NED CLP ExxonMobil Energy Ltd. 60% 40% CLP Mitsubishi Corporation 33.33% 33.33% EGCO 33.33% CLP India CLP 100% Jhajjar Power CLP 100% TRUenergy CLP Wind Farms CLP 100% CLP 100% Khandke Wind CLP 100% Theni Phase - II Project CLP 100% GNPJVC Shandong Huaneng Wind CGN Wind CLP CLP CLP Guangdong Nuclear Huaneng Renewable CGN Wind Energy Ltd. 68% 25% Investment Company, Ltd. 75% 45% Corporation Ltd. 55% 32% CSEC Guohua Qian'an I & II Wind Shanghai Chongming Wind CLP Shanghai Green Environmental China Shenhua Energy 70% CLP 100% 30% CLP Protection Energy Co., Ltd. 51% CPI New Energy Shenmu Changling II Wind 29% Holding Co., Ltd. 20% CLP CLP Sinohydro China Shenhua Energy 51% Boxing Biomass 49% 45% New Energy Co., Ltd. 55% SZPC CLP Shandong Boxing County Laizhou Wind 79% Huanyu Paper Co. Ltd. 21% China Guodian Corporation 36.6% CLP CLP Huadian Power International PSDC Shandong International 29.4% 45% Corporation Limited 55% Trust Corporation 14.4% CLP CLP-CWP Wind ExxonMobil Energy Ltd. 51% EDF International S.A.S. 19.6% 49% CLP Huaiji Hydro Fangchenggang China WindPower Group 50% 50% Huaiji County CLP Guangxi Water & Power CLP Penglai I Wind Huilian Hydro-electric 70% Engineering (Group) Co., Ltd. 30% 84.9% (Group) Co. Ltd. 15.1% CLP 100% Shandong Guohua Wind Yang_er Hydro CLP Guohua Energy Nanao II & III Wind CLP 100% 49% Investment Co., Ltd. -

The Survey on the Distribution of MC Fei and Xiao Initial Groups in Chinese Dialects
IALP 2020, Kuala Lumpur, Dec 4-6, 2020 The Survey on the Distribution of MC Fei and Xiao Initial Groups in Chinese Dialects Yan Li Xiaochuan Song School of Foreign Languages, School of Foreign Languages, Shaanxi Normal University, Shaanxi Normal University Xi’an, China /Henan Agricultural University e-mail: [email protected] Xi’an/Zhengzhou, China e-mail:[email protected] Abstract — MC Fei 非 and Xiao 晓 initial group discussed in this paper includes Fei 非, Fu groups are always mixed together in the southern 敷 and Feng 奉 initials, but does not include Wei part of China. It can be divided into four sections 微, while MC Xiao 晓 initial group includes according to the distribution: the northern area, the Xiao 晓 and Xia 匣 initials. The third and fourth southwestern area, the southern area, the class of Xiao 晓 initial group have almost southeastern area. The mixing is very simple in the palatalized as [ɕ] which doesn’t mix with Fei northern area, while in Sichuan it is the most initial group. This paper mainly discusses the first extensive and complex. The southern area only and the second class of Xiao and Xia initials. The includes Hunan and Guangxi where ethnic mixing of Fei and Xiao initials is a relatively minorities gather, and the mixing is very recent phonetic change, which has no direct complicated. Ancient languages are preserved in the inheritance with the phonological system of southeastern area where there are still bilabial Qieyun. The mixing mainly occurs in the southern sounds and initial consonant [h], but the mixing is part of the mainland of China. -

Table of Codes for Each Court of Each Level
Table of Codes for Each Court of Each Level Corresponding Type Chinese Court Region Court Name Administrative Name Code Code Area Supreme People’s Court 最高人民法院 最高法 Higher People's Court of 北京市高级人民 Beijing 京 110000 1 Beijing Municipality 法院 Municipality No. 1 Intermediate People's 北京市第一中级 京 01 2 Court of Beijing Municipality 人民法院 Shijingshan Shijingshan District People’s 北京市石景山区 京 0107 110107 District of Beijing 1 Court of Beijing Municipality 人民法院 Municipality Haidian District of Haidian District People’s 北京市海淀区人 京 0108 110108 Beijing 1 Court of Beijing Municipality 民法院 Municipality Mentougou Mentougou District People’s 北京市门头沟区 京 0109 110109 District of Beijing 1 Court of Beijing Municipality 人民法院 Municipality Changping Changping District People’s 北京市昌平区人 京 0114 110114 District of Beijing 1 Court of Beijing Municipality 民法院 Municipality Yanqing County People’s 延庆县人民法院 京 0229 110229 Yanqing County 1 Court No. 2 Intermediate People's 北京市第二中级 京 02 2 Court of Beijing Municipality 人民法院 Dongcheng Dongcheng District People’s 北京市东城区人 京 0101 110101 District of Beijing 1 Court of Beijing Municipality 民法院 Municipality Xicheng District Xicheng District People’s 北京市西城区人 京 0102 110102 of Beijing 1 Court of Beijing Municipality 民法院 Municipality Fengtai District of Fengtai District People’s 北京市丰台区人 京 0106 110106 Beijing 1 Court of Beijing Municipality 民法院 Municipality 1 Fangshan District Fangshan District People’s 北京市房山区人 京 0111 110111 of Beijing 1 Court of Beijing Municipality 民法院 Municipality Daxing District of Daxing District People’s 北京市大兴区人 京 0115 -
简报 in February 2016 2016年2月 2016年2月 中国社会福利基金会免费午餐基金管理委员会主办
免费午餐基金 FREE LUNCH FOR CHILDREN BRIEFING简报 IN FEBRUARY 2016 2016年2月 2016年2月 中国社会福利基金会免费午餐基金管理委员会主办 www.mianfeiwucan.org 学校执行汇报 Reports of Registered Schools: 截止2016年2月底 累计开餐学校 517 所 现有开餐学校 437所 现项目受惠人数 143359人 现有用餐人数 104869人 分布于全国23个省市自治区 By the end of February 2016, Free Lunch has found its footprints in 517 schools (currently 437) across 23 provinces, municipalities and autonomous regions with a total of 143,359 beneficiaries and 104,869 currently registered for free lunches. 学校执行详细情况 Details: 2月免费午餐新开餐学校3所, 其中湖南1所,新疆1所,河北1所。 Additional 3 schools are included in the Free Lunch campaign, including 1 in Hunan, 1 in Xinjiang and 1 in Hebei. 学校开餐名单(以拨款时间为准) List of Schools(Grant date prevails): 学校编号 学校名称 微博地址 School No. School Name Weibo Link 2016001 湖南省张家界市桑植县利福塔乡九天洞苗圃学校 http://weibo.com/u/5608665513 Miaopu School of Jiutiandong village, Lifuta Town, Sangzhi County,Zhangjiajie,Hunan Province 2016002 新疆维吾尔族自治区阿克苏地区拜城县赛里木镇英巴格村小学 http://weibo.com/u/5735367760 Primary School of Yingbage Village, Sailimu Town, Baicheng County, Aksu Prefecture, Xinjiang Uygur Autonomous Region 2016003 河北省张家口市赤城县大海陀乡中心小学 http://weibo.com/5784417643 Central Primary School of Dahaituo Town, Chicheng County, Zhangjiakou, Hebei Province 更多学校信息请查看免费午餐官网学校公示页面 For more information about the schools, please view the school page at our official website http://www.mianfeiwucan.org/school/schoolinfo/ 财务数据公示 Financial Data: 2016年2月善款收入: 701万余元,善款支出: 499万余元 善款支出 499万 善款收入 701万 累计总收入 18829万 Donations received: RMB 7.01 million+; Expenditure: RMB 4.99 million+ As of the end of February 2016, Free Lunch for Children has a gross income of RMB 188.29 million. 您可进入免费午餐官网查询捐赠 You can check your donation at our official website: http://www.mianfeiwucan.org/donate/donation/ 项目优秀学校评选表彰名单 Outstanding Schools Name List: 寒假期间,我们对免费午餐的项目执行学校进行了评选表彰活动,感谢学校以辛勤的工作为孩子们带来 温暖安全的午餐。 During the winter holiday, we selected outstanding schools which implemented Free Lunch For Children Program, in recognition of hard work of school staff in providing students warm and safe lunches. -

Addition of Clopidogrel to Aspirin in 45 852 Patients with Acute Myocardial Infarction: Randomised Placebo-Controlled Trial
Articles Addition of clopidogrel to aspirin in 45 852 patients with acute myocardial infarction: randomised placebo-controlled trial COMMIT (ClOpidogrel and Metoprolol in Myocardial Infarction Trial) collaborative group* Summary Background Despite improvements in the emergency treatment of myocardial infarction (MI), early mortality and Lancet 2005; 366: 1607–21 morbidity remain high. The antiplatelet agent clopidogrel adds to the benefit of aspirin in acute coronary See Comment page 1587 syndromes without ST-segment elevation, but its effects in patients with ST-elevation MI were unclear. *Collaborators and participating hospitals listed at end of paper Methods 45 852 patients admitted to 1250 hospitals within 24 h of suspected acute MI onset were randomly Correspondence to: allocated clopidogrel 75 mg daily (n=22 961) or matching placebo (n=22 891) in addition to aspirin 162 mg daily. Dr Zhengming Chen, Clinical Trial 93% had ST-segment elevation or bundle branch block, and 7% had ST-segment depression. Treatment was to Service Unit and Epidemiological Studies Unit (CTSU), Richard Doll continue until discharge or up to 4 weeks in hospital (mean 15 days in survivors) and 93% of patients completed Building, Old Road Campus, it. The two prespecified co-primary outcomes were: (1) the composite of death, reinfarction, or stroke; and Oxford OX3 7LF, UK (2) death from any cause during the scheduled treatment period. Comparisons were by intention to treat, and [email protected] used the log-rank method. This trial is registered with ClinicalTrials.gov, number NCT00222573. or Dr Lixin Jiang, Fuwai Hospital, Findings Allocation to clopidogrel produced a highly significant 9% (95% CI 3–14) proportional reduction in death, Beijing 100037, P R China [email protected] reinfarction, or stroke (2121 [9·2%] clopidogrel vs 2310 [10·1%] placebo; p=0·002), corresponding to nine (SE 3) fewer events per 1000 patients treated for about 2 weeks. -

The Stoor Hobbit of Guangdong: Goniurosaurus Gollum Sp. Nov., a Cave-Dwelling Leopard Gecko (Squamata, Eublepharidae) from South China
ZooKeys 991: 137–153 (2020) A peer-reviewed open-access journal doi: 10.3897/zookeys.991.54935 RESEARCH ARTICLE https://zookeys.pensoft.net Launched to accelerate biodiversity research The Stoor Hobbit of Guangdong: Goniurosaurus gollum sp. nov., a cave-dwelling Leopard Gecko (Squamata, Eublepharidae) from South China Shuo Qi1,*, Jian Wang1,*, L. Lee Grismer2, Hong-Hui Chen1, Zhi-Tong Lyu1, Ying-Yong Wang1 1 State Key Laboratory of Biocontrol/ The Museum of Biology, School of Life Sciences, Sun Yat-sen University, Guangzhou, Guangdong 510275, China 2 Herpetology Laboratory, Department of Biology, La Sierra Univer- sity, Riverside, California 92515, USA Corresponding author: Ying-Yong Wang ([email protected]) Academic editor: T. Ziegler | Received 31 May 2020 | Accepted 10 September 2020 | Published 11 November 2020 http://zoobank.org/2D9EEFC0-B43E-4AC3-86E7-89944E54169B Citation: Qi S, Wang J, Grismer LL, Chen H-H, Lyu Z-T, Wang Y-Y (2020) The Stoor Hobbit of Guangdong: Goniurosaurus gollum sp. nov., a cave-dwelling Leopard Gecko (Squamata, Eublepharidae) from South China. ZooKeys 991: 137–153. https://doi.org/10.3897/zookeys.991.54935 Abstract A new species of the genus Goniurosaurus is described based on three specimens collected from a limestone cave in Huaiji County, Guangdong Province, China. Based on molecular phylogenetic analyses, the new species is nested within the Goniurosaurus yingdeensis species group. However, morphological analyses cannot ascribe it to any known species of that group. It is distinguished from the other three species in the group by a combination of the following characters: scales around midbody 121–128; dorsal tubercle rows at midbody 16–17; presence of 10–11 precloacal pores in males, and absent in females; nuchal loop and body bands immaculate, without black spots; iris orange, gradually darker on both sides.