Human Factors Design Guidance for Driver-Vehicle Interfaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ISO/TC46 (Information and Documentation) Liaison to IFLA
ISO/TC46 (Information and Documentation) liaison to IFLA Annual Report 2015 TC46 on Information and documentation has been leading efforts related to information management since 1947. Standards1 developed under ISO/TC46 facilitate access to knowledge and information and standardize automated tools, computer systems, and services relating to its major stakeholders of: libraries, publishing, documentation and information centres, archives, records management, museums, indexing and abstracting services, and information technology suppliers to these communities. TC46 has a unique role among ISO information-related committees in that it focuses on the whole lifecycle of information from its creation and identification, through delivery, management, measurement, and archiving, to final disposition. *** The following report summarizes activities of TC46, SC4, SC8 SC92 and their resolutions of the annual meetings3, in light of the key-concepts of interest to the IFLA community4. 1. SC4 Technical interoperability 1.1 Activities Standardization of protocols, schemas, etc. and related models and metadata for processes used by information organizations and content providers, including libraries, archives, museums, publishers, and other content producers. 1.2 Active Working Group WG 11 – RFID in libraries WG 12 – WARC WG 13 – Cultural heritage information interchange WG 14 – Interlibrary Loan Transactions 1.3 Joint working groups 1 For the complete list of published standards, cfr. Appendix A. 2 ISO TC46 Subcommittees: TC46/SC4 Technical interoperability; TC46/SC8 Quality - Statistics and performance evaluation; TC46/SC9 Identification and description; TC46/SC 10 Requirements for document storage and conditions for preservation - Cfr Appendix B. 3 The 42nd ISO TC46 plenary, subcommittee and working groups meetings, Beijing, June 1-5 2015. -

Measuring Behaviour 2020
IAAP DIVISION 15 – ACTIVITIES IN EUROPE Measuring Behaviour 2020 DATE & PLACE: May 27 – 29, 2020. Kraków, Poland. HOW TO ENROLL: You have to register yourself at the following link: https://www.measuringbehavior.org/register Measuring Behavior is the stage for the latest inventions, prototypes, and techniques in behavioral research. It is the premier event for scientists and practitioners involved in behavioral research, and focusses on methods, techniques, and tools in human and animal behavioral research. As well as the usual focus on animal and human behavior research methods, in recent years we have also introduced some new themes, including robotics (bio-inspired robots and human-robot interactions), IAAP DIVISION 15 – ACTIVITIES IN EUROPE sport (biomechanics and human movement), and open science. Measuring Behavior is the premier interdisciplinary event for scientists and practitioners concerned with the study of human or animal behavior. This unique conference focuses on methods, techniques, and tools in behavioral research in the widest sense. While most conferences focus on a specific scientific area, this conference tries to create bridges between disciplines by bringing together people who may otherwise be unlikely to meet each other. IMPORTANT DATES: • May 2019: Call for Symposia. • July 2019: Call for Papers. • December 2019: Deadline for symposia submission. • January 2020: Deadline for abstracts. • March 2020: Notice of acceptance of abstracts. • March 2020: Deadline for presenters’ registration/Early bird. IV International Conference of the Polish Society for the Integration in Psychotherapy DATE & PLACE: May 29 – 31, 2020. Warsaw, Poland. IAAP DIVISION 15 – ACTIVITIES IN EUROPE HOW TO ENROLL: You have to register yourself at the following link: http://conference.psip.org.pl/en/registration-form/ The Polish Society for the Integration of Psychotherapy organizes a meeting where reknown specialists on various approaches to psychotherapy will gather: clinicians, practitioners and researchers. -

FS209E and ISO Cleanroom Standards
FS209E and ISO Cleanroom Standards Before global cleanroom classifications and standards were adopted by the International Standards Organization (ISO), the U.S. General Service Administration’s standards (known as FS209E) were applied virtually worldwide. However, as the need for international standards grew, the ISO established a technical committee and several working groups to delineate its own set of standards. FS209E contains six classes, while the ISO 14644-1 classification system adds two cleaner standards and one dirtier standard (see chart below). The "cleanest" cleanroom in FS209E is referred to as Class 1; the "dirtiest" cleanroom is a class 100,000. ISO cleanroom classifications are rated according to how much particulate of specific sizes exist per cubic meter (see second chart). The "cleanest" cleanroom is a class 1 and the "dirtiest" a class 9. ISO class 3 is approximately equal to FS209E class 1, while ISO class 8 approximately equals FS209E class 100,000. By law, Federal Standard 209E can be superseded by new international standards. It is expected that 209E will be used in some industries over the next five years, but that eventually it will be replaced internationally by ISO 14644-1. Airborne Particulate Cleanliness Class Comparison ISO 14644-1 FEDERAL STANDARD 209E ISO Class English Metric ISO 1 ISO 2 ISO 3 ISO 4 1 M1.5 ISO 5 10 M2.5 ISO 6 100 M3.5 ISO 7 1,000 M4.5 ISO 8 10,000 M5.5 ISO 9 100,000 M6.5 Airborne Particulate Cleanliness Classes (by cubic meter): CLASS Number of Particles per Cubic Meter by Micrometer Size 0.1 0.2 0.3 0.5 micron 1 micron 5 microns micron micron micron ISO 1 10 2 ISO 2 100 24 10 4 ISO 3 1,000 237 102 35 8 ISO 4 10,000 2,370 1,020 352 83 ISO 5 100,000 23,700 10,200 3,520 832 29 ISO 6 1,000,000 237,000 102,000 35,200 8,320 293 ISO 7 352,000 83,200 2,930 ISO 8 3,520,000 832,000 29,300 ISO 9 35,200,000 8,320,000 293,000 In cleanrooms, particulate concentration changes over time — from the construction and installation of equipment to its operational status. -

ELITE DIGITAL SPEEDOMETER Installation Tips
INSTALLATION INSTRUCTIONS ELITE DIGITAL SPEEDOMETER 2650-1951-77 Models 6789-CB, 6789-PH, 6789-SC, 6789-UL QUESTIONS: If after completely reading these instructions you have questions regarding the operation or installation of your instrument(s), please contact AutoMeter Technical Service at 866-248-6357. You may also email us at [email protected]. Additional information can also be found at http://www.autometer.com. General Information This instrument utilizes a single LCD to display odometer and two trip odometer mileages. Press the Trip (Right) button on the dial window to cycle between odometer, Trip 1, and Trip 2 displays on the LCD. Pressing and holding the Trip button for more than 2 seconds while viewing either Trip display will reset the trip currently being displayed. The odometer cannot be reset. NOTE: The odometer on the speedometer portion of this instrument will show some mileage less than 5 miles (8km). This is a result of factory testing to ensure optimum quality. TIP: AutoMeter always recommends performing the calibration process for best speedometer accuracy. Speedometer Senders: The electronic speedometer in this instrument is designed to operate with an electrical speed sensor. The speed sensor signal range must be between 500 and 400,000 pulses/mile (310 and 248,500 pulses/km). Any speed sensor or electronic module that meets the following two conditions can be used: 1. Pulse rate generated is proportional to vehicle speed. 2. Output voltage within the ranges listed below: a. Hall effect sender, 3 wire (5 to 16V) b. Sine wave generator, 2-wire (1.4 VAC min.) c. -

Altroz.Tatamotors.Com
11189812 TATA-A-OWNER’S MANUAL Cover page 440 mm X 145 mm OWNER’S MANUAL Call us:1-800-209-7979 Mail us: [email protected] Visit us: service.tatamotors.com 5442 5840 9901 Developed by: Technical Literature Cell,ERC. altroz.tatamotors.com OWNER’S MANUAL CUSTOMER ASSISTANCE In our constant endeavour to provide assistance and complete You can also approach nearest TATA MOTORS dealer. A sepa- service backup, TATA MOTORS has established an all India cus- rate Dealer network address booklet is provided with the tomer assistance centre. Owner’s manual. In case you have a query regarding any aspect of your vehicle, TATA MOTORS’ 24X7 Roadside Assistance Program offers tech- our Customer Assistance Centre will be glad to assist you on nical help in the event of a breakdown. Call the toll-free road- our Toll Free no. 1800 209 7979 side assistance helpline number. For additional information, refer to "24X7 Roadside Assis- tance" section in the Owner’s manual. ii Dear Customer, Welcome to the TATA MOTORS family. We congratulate you on the purchase of your new vehicle and we are privileged to have you as our valued customer. We urge you to read this Owner's Manual carefully and familiarize yourself with the equipment descriptions and operating instruc- tions before driving. Always carry out prescribed service/maintenance work as well as any required repairs at an authorized TATA MOTORS Dealers or Authorized Service Centre’s (TASCs). Use only genuine parts for continued reliability, safety and performance of your vehicle. You are welcome to contact our dealer or Customer Assistance toll free no. -

Psychopathological Risk in Parentally Bereaved Adolescents
icH&Hpsy 2016 : 2nd International Conference on Health and Health Psychology Psychopathological Risk in Parentally Bereaved Adolescents Silvia Ciminoa, Luca Cernigliab, Giulia Ballarottoa*, Michela Erriua * Corresponding author: Giulia Ballarotto, [email protected] aDepartment of Dynamic and Clinical Psychology, Sapienza University of Rome, via degli Apuli 1, Rome, Italy, [email protected], [email protected], [email protected] bDepartment of Psychology, International Telematic University UNINETTUNO, Corso Vittorio Emanuele II 39, Rome, Italy, [email protected] Abstract http://dx.doi.org/10.15405/epsbs.2016.07.02.29 For a child, the death of a parent is a traumatic experience and can give rise to several difficulties during the child’s development. International literature in this field has focused on clinical populations; evaluations of the psychological difficulties in adulthood have rarely been aimed at non-referred samples. The present study assessed the psychological functioning of a non-referred sample of adolescents, with consideration given to the impact of the loss of a caregiver during childhood on their psychological profiles. It also evaluated the association between the adolescents’ psychological profiles and possible psychopathological risk in the surviving parents. Three groups of subjects (N=96) were considered: adolescents who had suffered the loss before 3 years of age (Group A); adolescents who had experienced loss between 3 and 10 years of age (Group B); and adolescents who had experienced no loss (Group C). Psychological profiles, eating difficulties, and dissociative symptoms were evaluated during adolescence (14-16 years of age). Also assessed were the psychological profiles of the surviving caregivers. -

Transcript for Art Works Webinar in PDF Format
*********DISCLAIMER!!!************ THE FOLLOWING IS AN UNEDITED ROUGH DRAFT TRANSLATION FROM THE CART PROVIDER’S OUTPUT FILE. THIS TRANSCRIPT IS NOT VERBATIM AND HAS NOT BEEN PROOFREAD. THIS IS NOT A LEGAL DOCUMENT. THIS FILE MAY CONTAIN ERRORS. THIS TRANSCRIPT MAY NOT BE COPIED OR DISSEMINATED TO ANYONE UNLESS PERMISSION IS OBTAINED FROM THE HIRING PARTY. SOME INFORMATION CONTAINED HEREIN MAY BE WORK PRODUCT OF THE SPEAKERS AND/OR PRIVATE CONVERSATIONS AMONG PARTICIPANTS. HIRING PARTY ASSUMES ALL RESPONSIBILITY FOR SECURING PERMISSION FOR DISSEMINATION OF THIS TRANSCRIPT AND HOLDS HARMLESS Texas Closed Captioning, LLC FOR ANY ERRORS IN THE TRANSCRIPT AND ANY RELEASE OF INFORMATION CONTAINED HEREIN. ****************DISCLAIMER!!!**************** >> Everyone is so quiet. >> We're ready. >> We're doing our power thought, right? >> That's right. >> Sorry, we had interpreter issues. >> It's all right. >> They're connecting now. Yes, Ma'am, there's one of them. So you can change your name, Nancy, when I put your name in the system, I put a capital A. If you click on the ellipses you can correct that. Let's see ‑‑ we're still missing Grant. And Texas Closed Captioning is here. So let me do this. Is that the bottom? Okay. >> Yes, looks good. >> Okay, got that. I am still missing Grant. Patience, patience. Oh, so it's denim day which is created in response to a 1999 sexual assault ruling in an Italian court which stated that the victim's tight jeans implied consent to rape. >> Implied consent? Oh, nice. >> So denim day brings awareness to sexual assault and honors survivors who have experienced this trauma. -

Tactical Eyewear Protection Equipment Assessment Report
Tactical Eyewear Protection Equipment Assessment Report May 2020 Approved for Public Release SAVER-T-R-21 The Tactical Eyewear Protection Equipment Assessment Report was funded under Financial Transaction FTLF- 19-00009 from the U.S. Department of Homeland Security, Science and Technology Directorate. The views and opinions of authors expressed herein do not necessarily reflect those of the U.S. Government. Reference herein to any specific commercial products, processes, or services by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the U.S. Government. The information and statements contained herein shall not be used for the purposes of advertising, nor to imply the endorsement or recommendation of the U.S. Government. With respect to documentation contained herein, neither the U.S. Government nor any of its employees make any warranty, express or implied, including but not limited to the warranties of merchantability and fitness for a particular purpose. Further, neither the U.S. Government nor any of its employees assume any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed; nor do they represent that its use would not infringe privately owned rights. The cover photo and images included herein were provided by the National Urban Security Technology Laboratory, unless otherwise noted. Approved for Public Release ii FOREWORD The U.S. Department of Homeland Security (DHS) established the System Assessment and Validation for Emergency Responders (SAVER) Program to assist emergency responders making procurement decisions. Located within the Science and Technology Directorate (S&T) of DHS, the SAVER Program conducts objective assessments and validations on commercially available equipment and systems and develops knowledge products that provide relevant equipment information to the emergency responder community. -
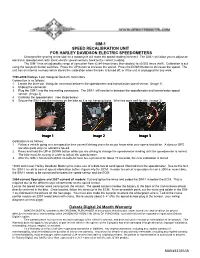
SIM-1 SPEED RECALIBRATION UNIT for HARLEY DAVIDSON ELECTRIC SPEEDOMETERS Changing the Gearing Or Tire Size on a Motorcycle Will Make the Speed Reading Incorrect
SIM-1 SPEED RECALIBRATION UNIT FOR HARLEY DAVIDSON ELECTRIC SPEEDOMETERS Changing the gearing or tire size on a motorcycle will make the speed reading incorrect. The SIM-1 will allow you to adjust an electronic speedometer, with stock electric speed sensors, back to the correct reading. The SIM-1 has an adjustable range of correction from x2.84 times (more than double) to x0.502 times (half). Calibration is set using the two push button switches. Press the UP button to increase the speed. Press the DOWN button to decrease the speed. The unit has an internal memory which stores the calibration when the bike is turned off, or if the unit is unplugged for any work. 1996-2006 Harleys 3-pin triangular Deutsch connectors Connection is as follows: 1. Locate the three pin, triangular connector between the speedometer and transmission speed sensor. (image 1 ) 2. Unplug the connector. 3. Plug the SIM-1 into the two mating connectors. The SIM-1 will now be in between the speedometer and transmission speed sensor. ( image 2 ) 4. Calibrate the speedometer. (see steps below) 5. Secure the SIM-1 into the harness on the bike so it is not hanging loose. Wire ties work well for this. (image 3) Image 111 Image 222 Image 333 Calibration is as follows: 1. Follow a vehicle going at a set speed or time yourself driving one mile so you know what your speed should be. A dyno or GPS are also great ways to reference speed. 2. Press and hold the UP or DOWN button while you are driving to change the speedometer reading until the speedometer is correct. -

Magical Items As a Note, All Magic Items Listed Here Require Attunement
Magical Items As a note, all magic items listed here require attunement. If an item is considered heavy enough to contribute to carrying capacity, it will be noted as such (according to a variant carrying capacity system, where in general 1 item = 1 slot, and you have slots equal to your strength score). Silver Specs Common Glasses made with silver rims. Allows you to see clearly up to 30 feet away in dim light, preventing you from rolling with disadvantage in dim conditions. Bucket Helm Common, Weighted A wooden bucket full of holes. +1 AC while not wearing armour, but disadvantage on all intelligence- based skill checks. Tin Foil Hat Common, Weighted An odd cap made of crumpled cooking material. Prevents your thoughts from being read by magic, but you become paranoid, and have disadvantage on Wisdom and Charisma skill checks. Gypsy Bandana Common A silk cloth with a decorative pattern. Become proficient with one musical instrument of your choice. Crimson Cowl Common A cloth cowl dyed deep red. Each time you are reduced to 0 hit points, you automatically succeed your first death saving throw. Jade Eyepatch Common An eyepatch made from jade stone. As an action, you can end the Blind condition on yourself. Butterfly Pendant Common This beautiful pendant births a butterfly on your command. The butterfly lives for 8 hours, then dies. The pendant can summon another butterfly on the next dawn. Bone Necklace Common An unsettling necklace made from animal bones. +2 to Intimidation skill checks. Wood Whorl Necklace Common An intricate carved necklace. Grants advantage on Animal Handling skill checks made to interact with non-hostile animals. -

2018 Toyota Yaris Ia
2018 Yaris iA Yaris iA shown in Graphite. Page 2 YARIS iA SPORTY SUSPENSION Find more excitement in every corner. Yaris iA features MacPherson strut front suspension and torsion beam rear suspension tuned to Packed with style, deliver a smooth ride and agile handling. tech and a whole lot more. Standard. Whoever said there’s no such thing as the total package obviously hasn’t met the 2018 Yaris iA. Built for those always on the move, this compact sedan brings dynamic handling, cutting-edge tech and a whole lot of style to every drive. Its smart design lets it fit in just about anywhere, and its spacious cabin is sized perfectly for friends and your favorite stuff. Best of all, its many great features come standard. So, yeah, the total package really does exist: We call it Yaris iA. You call it yours. ALLOY WHEELS Standard 16-in. alloy wheels keep you rolling in style. These split-spoke wheels not only look good, they help keep you in tune with the sporty side of Yaris iA. Page 3 INTERIOR Yaris iA interior shown in Mid-Blue Black. INTERIOR A stylishly cool driving experience. Yaris iA brings big-size comfort to a fun-size ride. Its thoughtfully crafted interior surrounds you with both style and substance thanks to standard features like contoured sport seats and steering wheel-mounted controls. Contrast stitching on the dash and carbon fiber-inspired trim pieces throughout convey a sense of sportiness, and the available 6-speed automatic with manual mode gives you more control of your drive. -

Haitian Creole – English Dictionary
+ + Haitian Creole – English Dictionary with Basic English – Haitian Creole Appendix Jean Targète and Raphael G. Urciolo + + + + Haitian Creole – English Dictionary with Basic English – Haitian Creole Appendix Jean Targète and Raphael G. Urciolo dp Dunwoody Press Kensington, Maryland, U.S.A. + + + + Haitian Creole – English Dictionary Copyright ©1993 by Jean Targète and Raphael G. Urciolo All rights reserved. No part of this work may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, or by any information storage and retrieval system, without the prior written permission of the Authors. All inquiries should be directed to: Dunwoody Press, P.O. Box 400, Kensington, MD, 20895 U.S.A. ISBN: 0-931745-75-6 Library of Congress Catalog Number: 93-71725 Compiled, edited, printed and bound in the United States of America Second Printing + + Introduction A variety of glossaries of Haitian Creole have been published either as appendices to descriptions of Haitian Creole or as booklets. As far as full- fledged Haitian Creole-English dictionaries are concerned, only one has been published and it is now more than ten years old. It is the compilers’ hope that this new dictionary will go a long way toward filling the vacuum existing in modern Creole lexicography. Innovations The following new features have been incorporated in this Haitian Creole- English dictionary. 1. The definite article that usually accompanies a noun is indicated. We urge the user to take note of the definite article singular ( a, la, an or lan ) which is shown for each noun. Lan has one variant: nan.