Characteristics and Origin of an Erosionally Resistant
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Planetary Geologic Mappers Annual Meeting
Program Lunar and Planetary Institute 3600 Bay Area Boulevard Houston TX 77058-1113 Planetary Geologic Mappers Annual Meeting June 12–14, 2018 • Knoxville, Tennessee Institutional Support Lunar and Planetary Institute Universities Space Research Association Convener Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Science Organizing Committee David Williams, Chair Arizona State University Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Robert Jacobsen Earth and Planetary Sciences Department, University of Tennessee Knoxville Bradley Thomson Earth and Planetary Sciences Department, University of Tennessee Knoxville Abstracts for this meeting are available via the meeting website at https://www.hou.usra.edu/meetings/pgm2018/ Abstracts can be cited as Author A. B. and Author C. D. (2018) Title of abstract. In Planetary Geologic Mappers Annual Meeting, Abstract #XXXX. LPI Contribution No. 2066, Lunar and Planetary Institute, Houston. Guide to Sessions Tuesday, June 12, 2018 9:00 a.m. Strong Hall Meeting Room Introduction and Mercury and Venus Maps 1:00 p.m. Strong Hall Meeting Room Mars Maps 5:30 p.m. Strong Hall Poster Area Poster Session: 2018 Planetary Geologic Mappers Meeting Wednesday, June 13, 2018 8:30 a.m. Strong Hall Meeting Room GIS and Planetary Mapping Techniques and Lunar Maps 1:15 p.m. Strong Hall Meeting Room Asteroid, Dwarf Planet, and Outer Planet Satellite Maps Thursday, June 14, 2018 8:30 a.m. Strong Hall Optional Field Trip to Appalachian Mountains Program Tuesday, June 12, 2018 INTRODUCTION AND MERCURY AND VENUS MAPS 9:00 a.m. Strong Hall Meeting Room Chairs: David Williams Devon Burr 9:00 a.m. -

The History Group's Silver Jubilee
History of Meteorology and Physical Oceanography Special Interest Group Newsletter 1, 2010 ANNUAL REPORT CONTENTS We asked in the last two newsletters if you Annual Report ........................................... 1 thought the History Group should hold an Committee members ................................ 2 Annual General Meeting. There is nothing in Mrs Jean Ludlam ...................................... 2 the By-Law s or Standing Orders of the Royal Meteorological Society that requires the The 2010 Summer Meeting ..................... 3 Group to hold one, nor does Charity Law Report of meeting on 18 November .......... 4 require one. Which papers have been cited? .............. 10 Don’t try this at home! ............................. 10 Only one person responded, and that was in More Richard Gregory reminiscences ..... 11 passing during a telephone conversation about something else. He was in favour of Storm warnings for seafarers: Part 2 ....... 13 holding an AGM but only slightly so. He Swedish storm warnings ......................... 17 expressed the view that an AGM provides an Rikitea meteorological station ................. 19 opportunity to put forward ideas for the More on the D-Day forecast .................... 20 Group’s committee to consider. Recent publications ................................ 21 As there has been so little response, the Did you know? ........................................ 22 Group’s committee has decided that there will Date for your diary .................................. 23 not be an AGM this year. Historic picture ........................................ 23 2009 members of the Group ................... 24 CHAIRMAN’S REVIEW OF 2009 by Malcolm Walker year. Sadly, however, two people who have supported the Group for many years died during I begin as I did last year. Without an enthusiastic 2009. David Limbert passed away on 3 M a y, and conscientious committee, there would be no and Jean Ludlam died in October (see page 2). -

Charles Darwin: a Companion
CHARLES DARWIN: A COMPANION Charles Darwin aged 59. Reproduction of a photograph by Julia Margaret Cameron, original 13 x 10 inches, taken at Dumbola Lodge, Freshwater, Isle of Wight in July 1869. The original print is signed and authenticated by Mrs Cameron and also signed by Darwin. It bears Colnaghi's blind embossed registration. [page 3] CHARLES DARWIN A Companion by R. B. FREEMAN Department of Zoology University College London DAWSON [page 4] First published in 1978 © R. B. Freeman 1978 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise without the permission of the publisher: Wm Dawson & Sons Ltd, Cannon House Folkestone, Kent, England Archon Books, The Shoe String Press, Inc 995 Sherman Avenue, Hamden, Connecticut 06514 USA British Library Cataloguing in Publication Data Freeman, Richard Broke. Charles Darwin. 1. Darwin, Charles – Dictionaries, indexes, etc. 575′. 0092′4 QH31. D2 ISBN 0–7129–0901–X Archon ISBN 0–208–01739–9 LC 78–40928 Filmset in 11/12 pt Bembo Printed and bound in Great Britain by W & J Mackay Limited, Chatham [page 5] CONTENTS List of Illustrations 6 Introduction 7 Acknowledgements 10 Abbreviations 11 Text 17–309 [page 6] LIST OF ILLUSTRATIONS Charles Darwin aged 59 Frontispiece From a photograph by Julia Margaret Cameron Skeleton Pedigree of Charles Robert Darwin 66 Pedigree to show Charles Robert Darwin's Relationship to his Wife Emma 67 Wedgwood Pedigree of Robert Darwin's Children and Grandchildren 68 Arms and Crest of Robert Waring Darwin 69 Research Notes on Insectivorous Plants 1860 90 Charles Darwin's Full Signature 91 [page 7] INTRODUCTION THIS Companion is about Charles Darwin the man: it is not about evolution by natural selection, nor is it about any other of his theoretical or experimental work. -

Meat: a Novel
University of New Hampshire University of New Hampshire Scholars' Repository Faculty Publications 2019 Meat: A Novel Sergey Belyaev Boris Pilnyak Ronald D. LeBlanc University of New Hampshire, [email protected] Follow this and additional works at: https://scholars.unh.edu/faculty_pubs Recommended Citation Belyaev, Sergey; Pilnyak, Boris; and LeBlanc, Ronald D., "Meat: A Novel" (2019). Faculty Publications. 650. https://scholars.unh.edu/faculty_pubs/650 This Book is brought to you for free and open access by University of New Hampshire Scholars' Repository. It has been accepted for inclusion in Faculty Publications by an authorized administrator of University of New Hampshire Scholars' Repository. For more information, please contact [email protected]. Sergey Belyaev and Boris Pilnyak Meat: A Novel Translated by Ronald D. LeBlanc Table of Contents Acknowledgments . III Note on Translation & Transliteration . IV Meat: A Novel: Text and Context . V Meat: A Novel: Part I . 1 Meat: A Novel: Part II . 56 Meat: A Novel: Part III . 98 Memorandum from the Authors . 157 II Acknowledgments I wish to thank the several friends and colleagues who provided me with assistance, advice, and support during the course of my work on this translation project, especially those who helped me to identify some of the exotic culinary items that are mentioned in the opening section of Part I. They include Lynn Visson, Darra Goldstein, Joyce Toomre, and Viktor Konstantinovich Lanchikov. Valuable translation help with tricky grammatical constructions and idiomatic expressions was provided by Dwight and Liya Roesch, both while they were in Moscow serving as interpreters for the State Department and since their return stateside. -

Bills Paid by Payee Second Quarter Fiscal Year 20/21
BILLS PAID BY PAYEE SECOND QUARTER FISCAL YEAR 20/21 A complete detailed record is available at the Elko County Comptroller's Office. Office Hours: Monday-Friday 8:00A.M. until 5:00P.M. 540 Court St. Suite 101 Elko, NV 89801 Office Phone (775)753-7073*Disclaimer-The original and any duplicate or copy of each receipt, bill,check,warrant,voucher or other similar document that supports a transaction, the amount of which is shown in the total of this report, along with the name of the person whom such allowance is made and the purpose of the allowance, is a public record that is available for inspection and copying by any person pursuant to the provisions of chapter 239 of NRS. VENDOR CHECK ARGO COMPANY, INC 821.98 A ARNOLD BECK CONSTRUCTION 1,599.40 AT&T 3,697.06 5TH GEAR POWER SPORTS 41.74 AT&T MOBILITY 42.24 A PLUS URGENT CARE 766 AUTO GRAPHICS 400 A PLUS URGENT CARE ELKO 846.33 B A-1 RADIATOR REPAIR INC. 1,079.00 BARBARA J HOFHEINS 121.9 ACKERMAN MATTHEW 1388.93 BARBARA JO MAPLE 762.5 ADVANCE AUTO CARE 629.89 BARRY RENTAL 86.03 ADVANCED RADIOLOGY 1195.5 BEI CAPELI 5,000.00 AIRGAS 541.3 BERTOLINI VALVES INC 1,859.12 AIRPORT SHELL 9 BETTY HICKS 177.56 ALCOHOL MONITORING SYSTEMS INC 791 BLAINE ROBINSON & NIKIERA CAST 1,132.00 ALERTUS TECHNOLOGIES LLC 4,950.00 BLOHM JEWELERS INC 5,000.00 ALICIA GUAMAN 58 BLUE 360 MEDIA LLC 70.75 ALLIED UNIVERAL SECURITY SERVI 37,229.50 BOARD OF REGENTS 14300.04 ALLUSIVE IMAGES 5,000.00 BOB BARKER COMPANY 4418.55 ALYSSA K DANN 120 BONANZA PRODUCE 320.23 AMANDA JEAN GIRMAUDO 160 BOSS TANKS 5,024.00 AMBER DAWN -

Martian Crater Morphology
ANALYSIS OF THE DEPTH-DIAMETER RELATIONSHIP OF MARTIAN CRATERS A Capstone Experience Thesis Presented by Jared Howenstine Completion Date: May 2006 Approved By: Professor M. Darby Dyar, Astronomy Professor Christopher Condit, Geology Professor Judith Young, Astronomy Abstract Title: Analysis of the Depth-Diameter Relationship of Martian Craters Author: Jared Howenstine, Astronomy Approved By: Judith Young, Astronomy Approved By: M. Darby Dyar, Astronomy Approved By: Christopher Condit, Geology CE Type: Departmental Honors Project Using a gridded version of maritan topography with the computer program Gridview, this project studied the depth-diameter relationship of martian impact craters. The work encompasses 361 profiles of impacts with diameters larger than 15 kilometers and is a continuation of work that was started at the Lunar and Planetary Institute in Houston, Texas under the guidance of Dr. Walter S. Keifer. Using the most ‘pristine,’ or deepest craters in the data a depth-diameter relationship was determined: d = 0.610D 0.327 , where d is the depth of the crater and D is the diameter of the crater, both in kilometers. This relationship can then be used to estimate the theoretical depth of any impact radius, and therefore can be used to estimate the pristine shape of the crater. With a depth-diameter ratio for a particular crater, the measured depth can then be compared to this theoretical value and an estimate of the amount of material within the crater, or fill, can then be calculated. The data includes 140 named impact craters, 3 basins, and 218 other impacts. The named data encompasses all named impact structures of greater than 100 kilometers in diameter. -
2021 Transpacific Yacht Race Event Program
TRANSPACTHE FIFTY-FIRST RACE FROM LOS ANGELES 2021 TO HONOLULU 2 0 21 JULY 13-30, 2021 Comanche: © Sharon Green / Ultimate Sailing COMANCHE Taxi Dancer: © Ronnie Simpson / Ultimate Sailing • Hamachi: © Team Hamachi HAMACHI 2019 FIRST TO FINISH Official race guide - $5.00 2019 OVERALL CORRECTED TIME WINNER P: 808.845.6465 [email protected] F: 808.841.6610 OFFICIAL HANDBOOK OF THE 51ST TRANSPACIFIC YACHT RACE The Transpac 2021 Official Race Handbook is published for the Honolulu Committee of the Transpacific Yacht Club by Roth Communications, 2040 Alewa Drive, Honolulu, HI 96817 USA (808) 595-4124 [email protected] Publisher .............................................Michael J. Roth Roth Communications Editor .............................................. Ray Pendleton, Kim Ickler Contributing Writers .................... Dobbs Davis, Stan Honey, Ray Pendleton Contributing Photographers ...... Sharon Green/ultimatesailingcom, Ronnie Simpson/ultimatesailing.com, Todd Rasmussen, Betsy Crowfoot Senescu/ultimatesailing.com, Walter Cooper/ ultimatesailing.com, Lauren Easley - Leialoha Creative, Joyce Riley, Geri Conser, Emma Deardorff, Rachel Rosales, Phil Uhl, David Livingston, Pam Davis, Brian Farr Designer ........................................ Leslie Johnson Design On the Cover: CONTENTS Taxi Dancer R/P 70 Yabsley/Compton 2019 1st Div. 2 Sleds ET: 8:06:43:22 CT: 08:23:09:26 Schedule of Events . 3 Photo: Ronnie Simpson / ultimatesailing.com Welcome from the Governor of Hawaii . 8 Inset left: Welcome from the Mayor of Honolulu . 9 Comanche Verdier/VPLP 100 Jim Cooney & Samantha Grant Welcome from the Mayor of Long Beach . 9 2019 Barndoor Winner - First to Finish Overall: ET: 5:11:14:05 Welcome from the Transpacific Yacht Club Commodore . 10 Photo: Sharon Green / ultimatesailingcom Welcome from the Honolulu Committee Chair . 10 Inset right: Welcome from the Sponsoring Yacht Clubs . -

Evapotranspiration of Hawai'i Final Report
Evapotranspiration of Hawai‘i Final Report Thomas W. Giambelluca1, Xiufu Shuai1, Mallory L. Barnes2, Randall J. Alliss3, Ryan J. Longman1, Tomoaki Miura2, Qi Chen1, Abby G. Frazier1, Ryan G. Mudd1, Lan Cuo4, and Aaron D. Businger1 1 , Honolulu, HI, USA; 2Department of Natural Resources and Environmental Managment, University of Department of ,Geography, Honolulu, HI, University USA; 3Northrop of Hawai‘i Grumman at Mānoa Corporation, Chantilly, VA, USA; 4Institute for Tibetan Plateau Research, Chinese Academy of Sciences, Hawai‘i at Mānoa Beijing, China Submitted to U.S. Army Corps of Engineers – Honolulu District and Commission on Water Resource Management, State of Hawai‘i February 2014 EVAPOTRANSPIRATION OF HAWAI‘I FINAL REPORT Acknowledgements The Hawai‘i Evapotranspiration Project was conducted under an agreement between the State of Hawai‘i Commission on Water Resource Management and the U.S. Army Corps of Engineers, Honolulu District under Section 22 of the Water Resources Act of 1974. Written Agreement No. W9128A-08-D-0007 between the U.S. Army Corps of Engineers and CH2M Hill, Inc., included a task subcontracted to the Department of Geography, University of Hawai‘i to develop evapotranspiration maps for the State of Hawai‘i. This project was facilitated through the assistance of numerous individuals and organizations. Please see the “People” tab of the Evapotranspiration of Hawai‘i web site for information about those who contributed to this work. We are grateful to those listed there, as well as many other individuals who contributed -

Orbital Detection and Implications of Akaganeite on Mars
45th Lunar and Planetary Science Conference (2014) 2364.pdf ORBITAL DETECTION AND IMPLICATIONS OF AKAGANEITE ON MARS. J. Carter1, C. Viviano-Beck2, L. Le Deit3, J. Bishop4, D. Loizeau5, 1IAS (Paris-Sud University, France, [email protected]), 2JHU/APL (Laurel, MD), 3LPGN (Nantes University, France), 4SETI Institute (Mountain View, CA), 5LGL (Lyon 1 University, France). Introduction: Recent orbital and landed investiga- lands, and intertidal marshes; and within hydrothermal tions of the Martian surface have demonstrated that the brines [13,14,15,16]. The main conditions necessary planet underwent a complex geological and aqueous for akaganéite precipitation are high salinity, mild acid- alteration history, fragments of which are recorded in ity (pH ~6), oxidizing conditions, and most important- the mineralogy of the heavily disrupted surface [1,2,3]. ly, high iron (II/III) and chlorine concentrations. On Of particular interest are aqueously altered minerals Earth, the source of Fe in akaganéite formation is typi- that trace warmer and wetter surface environments on cally iron ore or sulfides (the latter also providing acid- Early Mars, some of which also exhibit biogenic for- ity as they dissolve) [15,16]. Highly concentrated chlo- mation pathways [4,5]. rine occurs within volcanic fumaroles or deep sea vents The most abundant alteration minerals on Mars that as well as within evaporating, closed or semi-closed have likely been detected are hydrated silicates, hy- water systems [15,16,17]. drated sulfates, and chloride salts [6,7,8]. The detection of minor phases remains important, however, as they further constrain localized geochemical environments at different epochs in the timeline of Mars’s geological history. -

Widespread Crater-Related Pitted Materials on Mars: Further Evidence for the Role of Target Volatiles During the Impact Process ⇑ Livio L
Icarus 220 (2012) 348–368 Contents lists available at SciVerse ScienceDirect Icarus journal homepage: www.elsevier.com/locate/icarus Widespread crater-related pitted materials on Mars: Further evidence for the role of target volatiles during the impact process ⇑ Livio L. Tornabene a, , Gordon R. Osinski a, Alfred S. McEwen b, Joseph M. Boyce c, Veronica J. Bray b, Christy M. Caudill b, John A. Grant d, Christopher W. Hamilton e, Sarah Mattson b, Peter J. Mouginis-Mark c a University of Western Ontario, Centre for Planetary Science and Exploration, Earth Sciences, London, ON, Canada N6A 5B7 b University of Arizona, Lunar and Planetary Lab, Tucson, AZ 85721-0092, USA c University of Hawai’i, Hawai’i Institute of Geophysics and Planetology, Ma¯noa, HI 96822, USA d Smithsonian Institution, Center for Earth and Planetary Studies, Washington, DC 20013-7012, USA e NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA article info abstract Article history: Recently acquired high-resolution images of martian impact craters provide further evidence for the Received 28 August 2011 interaction between subsurface volatiles and the impact cratering process. A densely pitted crater-related Revised 29 April 2012 unit has been identified in images of 204 craters from the Mars Reconnaissance Orbiter. This sample of Accepted 9 May 2012 craters are nearly equally distributed between the two hemispheres, spanning from 53°Sto62°N latitude. Available online 24 May 2012 They range in diameter from 1 to 150 km, and are found at elevations between À5.5 to +5.2 km relative to the martian datum. The pits are polygonal to quasi-circular depressions that often occur in dense clus- Keywords: ters and range in size from 10 m to as large as 3 km. -

March 21–25, 2016
FORTY-SEVENTH LUNAR AND PLANETARY SCIENCE CONFERENCE PROGRAM OF TECHNICAL SESSIONS MARCH 21–25, 2016 The Woodlands Waterway Marriott Hotel and Convention Center The Woodlands, Texas INSTITUTIONAL SUPPORT Universities Space Research Association Lunar and Planetary Institute National Aeronautics and Space Administration CONFERENCE CO-CHAIRS Stephen Mackwell, Lunar and Planetary Institute Eileen Stansbery, NASA Johnson Space Center PROGRAM COMMITTEE CHAIRS David Draper, NASA Johnson Space Center Walter Kiefer, Lunar and Planetary Institute PROGRAM COMMITTEE P. Doug Archer, NASA Johnson Space Center Nicolas LeCorvec, Lunar and Planetary Institute Katherine Bermingham, University of Maryland Yo Matsubara, Smithsonian Institute Janice Bishop, SETI and NASA Ames Research Center Francis McCubbin, NASA Johnson Space Center Jeremy Boyce, University of California, Los Angeles Andrew Needham, Carnegie Institution of Washington Lisa Danielson, NASA Johnson Space Center Lan-Anh Nguyen, NASA Johnson Space Center Deepak Dhingra, University of Idaho Paul Niles, NASA Johnson Space Center Stephen Elardo, Carnegie Institution of Washington Dorothy Oehler, NASA Johnson Space Center Marc Fries, NASA Johnson Space Center D. Alex Patthoff, Jet Propulsion Laboratory Cyrena Goodrich, Lunar and Planetary Institute Elizabeth Rampe, Aerodyne Industries, Jacobs JETS at John Gruener, NASA Johnson Space Center NASA Johnson Space Center Justin Hagerty, U.S. Geological Survey Carol Raymond, Jet Propulsion Laboratory Lindsay Hays, Jet Propulsion Laboratory Paul Schenk, -
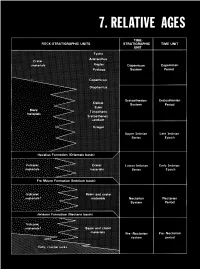
Relative Ages
CONTENTS Page Introduction ...................................................... 123 Stratigraphic nomenclature ........................................ 123 Superpositions ................................................... 125 Mare-crater relations .......................................... 125 Crater-crater relations .......................................... 127 Basin-crater relations .......................................... 127 Mapping conventions .......................................... 127 Crater dating .................................................... 129 General principles ............................................. 129 Size-frequency relations ........................................ 129 Morphology of large craters .................................... 129 Morphology of small craters, by Newell J. Fask .................. 131 D, method .................................................... 133 Summary ........................................................ 133 table 7.1). The first three of these sequences, which are older than INTRODUCTION the visible mare materials, are also dominated internally by the The goals of both terrestrial and lunar stratigraphy are to inte- deposits of basins. The fourth (youngest) sequence consists of mare grate geologic units into a stratigraphic column applicable over the and crater materials. This chapter explains the general methods of whole planet and to calibrate this column with absolute ages. The stratigraphic analysis that are employed in the next six chapters first step in reconstructing